

1094
.pdfе р и я в н у т р и в у з о в с к и х СибАДИм е т о д и ч е с к и х у к а з а н и й С и б А Д И
М н стерство образования и науки Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования
« ибирский государственный автомо ильно-дорожный университет (СибАДИ)» Кафедра «Автомат зация производственных процессов и электротехника»
МОДЕЛИРОВАНИЕ ЗЕМЛЕРОЙНО-ТР НСПОРТНЫХ МАШИН
В СРЕДЕ MATLAB-SIMULINK
Методические указания к лабораторным работам
2-е изд., деривативное
Составители: В.С. Щербаков, А.А. Руппель, И.В. Лазута, С.А. Милюшенко
Омск ▪ 2018

УДК 621.878.2:004.42 БКК 39.311.06.5:32.973
М74
_____________________________
Согласно 436-ФЗ от 29.12.2010 «О защите детей от информации, причиняющей вред их здоровью и развитию» данная продукция маркировке не подлежит.
_____________________________
Рецензент
д-р техн. наук, проф. Н.С. Галдин (СибАДИ)
Работа утверждена редакционно-издательским советом СибАДИ в качестве СибАДИметодических указаний.
М74 Модел рован е землеройно-транспортных машин в среде MatlabSimulink [Электронный ресурс] : методические указания к лабораторным работам /
сост. : В. . Щербаков, А.А. Руппель, И.В. Лазута, С.А. Милюшенко. –
( ерия внутр вузовск х методических указаний СибАДИ). – Электрон. дан. – Омск :
ибАДИ, 2018. – URL: http://bek.sibadi.org/cgi-bin/irbis64r plus/cgiirbis 64 ft.exe. -
Режим доступа: для автор зованных пользователей.
Содержат кратк е теоретические сведения, методику и порядок выполнения лабораторных работ по моделированию землеройно-транспортных машин в про-
граммной среде Matlab-Simulink.
Имеют нтеракт вное оглавление в виде закладок. Содержат ссылки на видеоматериалы обучающего и демонстрационного характера, которые воспроизводятся с помощью проигрывателя Windows Media.
Предназначены для выполнения лабораторных работ по дисциплинам «Моделирование систем и процессов», «Моделирование средств и систем автоматизации», «Моделирование систем с применением программных пакетов», «Автоматизация и компьютеризация транспортных и транспортно-технологических машин и оборудования», «Автоматизация транспортно-технологических машин», «Системы автоматики подъемно-транспортных, строительно-дорожных машин», «Автоматизированное проектирование наземных транспортных машин» обучающимися всех форм направлений бакалавриата и магистратуры « втоматизация технологических процессов и производств», «Управление в технических системах», «Наземные транспортнотехнологические комплексы», «Эксплуатация транспортно-технологических машин и комплексов» и специальности «Наземные транспортно-технологические средства».
Подготовлены на кафедре «Автоматизация производственных процессов электротехника».
Мультимедийное издание (500 КБ)
Системные требования : Intel, 3,4 GHz ; 150 МБ ; Windows XP/Vista/7 ; DVD-ROM ;
1 ГБ свободного места на жестком диске ; программа для чтения pdf-файлов : Adobe Acrobat Reader ; Foxit Reader
Техническая подготовка Н.В. Кенжалинова Издание 2-е, деривативное. Дата подписания к использованию 03.07.2018
Редакционно-издательский комплекс СибАДИ. 644080, г. Омск, пр. Мира, 5. РИО ИПК СибАДИ. 644080, г. Омск, ул. 2-я Поселковая, 1
ФГБОУ ВО «СибАДИ», 2018
ВВЕДЕНИЕ
Технические возможности отечественных землеройнотранспортных машин (ЗТМ) должны соответствовать лучшим мировым образцам. Наряду с дальнейшим совершенствованием традиционных конструкций необходимо создание новых конструктивных схем ЗТМ, которые бы соответствовали современным требованиям автоматизации процессов управления. Решен е такой проблемы в рамках существующих теорий ЗТМ
невозможно. |
Необходимо |
использование |
методов |
теории |
автомат ческого управления (ТАУ), которая является в настоящее |
||||
С |
|
|
|
|
время одной |
з важнейших технических наук общего применения. |
|||
Она дает основную теоретическую базу |
для исследования и |
|||
системпроект рован я разл чных автоматических и автоматизированных
во всех о ластях техники и народного хозяйства.
Целью проведен я данных лабораторных работ является
получен е навыков математического моделирования и исследования |
|
динам ческ х свойств основных типов ЗТМ при формировании |
|
обрабатываемой поверхности в программном продукте Matlab- |
|
Simulink. |
б |
Программный комплекс MATLAB поставляется вместе с паке- |
|
том расширения Simulink, предназначенным для моделирования ди- |
|
|
Д |
намических систем, модели которых составляются из отдельных бло- |
|
ков (компонентов). |
А |
|
И |
3
СТРУКТУРА ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН
В настоящее время у нас в стране и за рубежом выпускается достаточно большое количество ЗТМ, отличающихся не только типоразмерами, но и своей структурой. К сожалению, до настоящего времени структуре ЗТМ в научной и технической литературе не было уделено достаточного внимания, в то время как без учета структурных свойств ЗТМ невозможно осуществить дальнейшее совершенст-
Структурная схема ЗТМ – графическое изображение математической модели маш ны как совокупности элементарных динамичезвеньев связей между ними. Структурная схема ЗТМ содержит звенья, которые отражают не конструктивные или функциональные
вование х с стем управления.
признаки маш ны, а ее динамические свойства.
совпадал с алгорчтобытмом функционирования реальной ЗТМ.
Звенья структурной схемы ЗТМ могут не совпадать с ее реаль-
ными составными частями, так как основные требования к структур- |
|
ских |
ее результирующий алгоритм |
ной схеме заключаются в том, |
|
элементов машины, обеспечивающаяАее цельность и тождественность самой себе, сохранение основных свойств машины при различных
Д нам ческ е свойства звеньев структурной схемы могут быть описаны передаточными функциями, частотными характеристиками или переходными функциями. По структурной схеме можно получить передаточные функции или динамические характеристики машины в
целом. |
Д |
Структура ЗТМ |
– совокупность устойчивых связей основных |
внешних и внутренних изменениях.
При рассмотрении вопросов точности работ, выполняемых ЗТМ, в качестве основных элементов структуры машиныИвыделяются: рама
машины, элементы ходового оборудования, рабочий орган, элементы навесного оборудования (толкающие брусья, тяговая рама и т.п.).
Внутренние изменения – изменения обобщенных координат, характеризующих положение элементов структуры в выбранных системах отсчета.
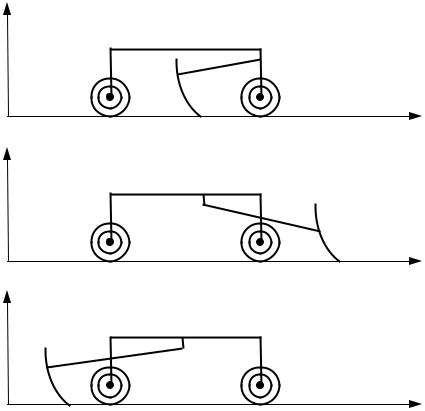
Анализ структуры ЗТМ по расположению рабочего органа относительно базы машины позволяет выделить три основных типа машин
(рис. 1):
•ЗТМ с рабочим органом в базе машины;
•ЗТМ с рабочим органом перед базой машины;
•ЗТМ с рабочим органом за базой машины.
4
Кроме рассмотренных существуют машины, представляющие собой сочетание признаков этих типов ЗТМ. Обычно такие машины содержат два или большее количество рабочих органов.
Y0 |
|
|
|
С |
а |
||
|
|
||
O0 |
|
X0 |
|
и |
|
||
Y0 |
|
|
|
|
б |
б |
|
|
в |
||
O0 |
А |
X0 |
|
Y0 |
|
||
O0 |
X0 |
||
|
|||
Рис. 1. Основные типы землеройно-транспортных машин:
а – в базе машины; б – перед базой машины; в – за базой машины
Каждому из этих типов машин свойственны |
свои закономерно- |
|
сти формирования обрабатываемой поверхности |
при движении по |
|
микрорельефу. |
Д |
|
Кроме рассмотренных существуют машины, представляющие |
||
собой сочетание признаков этих типов ЗТМИ. Обычно такие машины содержат два или большее количество рабочих органов.
При анализе влияния структуры ЗТМ на точность обрабатываемой поверхности приняты следующие допущения:
• рассматриваются изменения больших значений координат элементов расчетной схемы;
• обрабатываемая поверхность формируется режущей кромкой рабочего органа;
• режущая кромка рабочего органа в процессе копания не выглубляется;
5
• влияние призмы волочения на формирование обрабатываемой поверхности не учитывается;
• машина представлена упрощенно в виде многозвенника, содержащего раму машины, переднюю и заднюю оси с колесами, рабочий орган, толкающие брусья;
• задняя ось и толкающие брусья закреплены на раме жестко, рабочий орган жестко крепится к толкающим брусьям, передняя ось имеет баланс рную подвеску;
• |
звенья многозвенника, колеса, опорная поверхность абсо- |
|
лютно жестк е; |
|
|
• |
люфты в шарн рах не учитываются; |
|
С |
|
|
• |
колеса от опорной поверхности не отрываются и имеют с ней |
|
точечный контакт; |
|
|
• |
маш на дв жется постоянной скоростью; |
|
• |
в зав с |
от решаемых задач рассматриваются плоские |
мости или пространственныебрасчетные схемы.
Модел рован е ЗТМ состоит из нескольких стадий:
1.Принятие допущений, касающихся конструктивных особенностей машины, а также внутренних физико-механических связей её основных узлов.
2.Составление о о щенной расчетной схемы машины, задание линейных размеров и основных обобщенных координат.
3.Выявление основных геометрических связей узлов машины, вывод зависимостей между изменением обобщенных координат, составление аналитических выражений.
4.Выбор входных и выходных параметров ЗТМ, необходимых для исследования модели.
5.Составление структурной схемы математической модели машины, задание коэффициентов и передаточных функций, полученных из аналитических выражений.
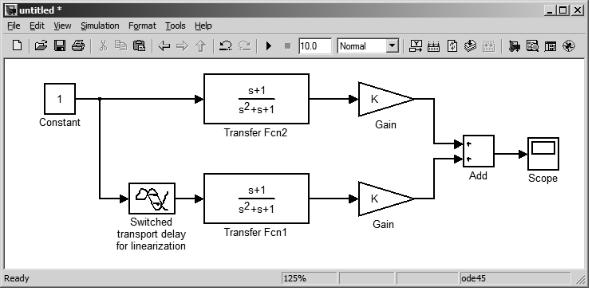
Полученную структурную схему можно использовать для ис-
следования в пакете Simulink, поддерживающем визуально-блочное моделирование в виде структурных схем (рис. 2).АИ
6
С |
|
и |
|
образом |
|
Р с. 2. Структурная схема модели в окне модели Simulink |
|
Так м |
, программный пакет Simulink является закон- |
ченным программным продуктом, позволяющим производить моде- |
|
|
А |
лирование структурных схем ЗТМ, исследование построенных моде- |
|
лей и вывод результатов в числовом и графическом виде. |
|
|
Д |
|
И |
7
|
|
Лабораторная работа №1 |
|
|
|
|||
|
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ СВОЙСТВ |
|
||||||
|
|
БАЛАНСИРНОЙ ТЕЛЕЖКИ |
|
|
|
|||
Цель работы − изучить динамические свойства балансирной |
||||||||
тележки. |
|
|
|
|
|
|
|
|
Описание балансирной тележки. Важным элементом ходового |
||||||||
оборудован я мног х ЗТМ является балансирная тележка, которая |
||||||||
состоит |
з пары колесных мостов, шарнирно соединенных между со- |
|||||||
бой на оси креплен я. |
|
|
|
|
|
|
||
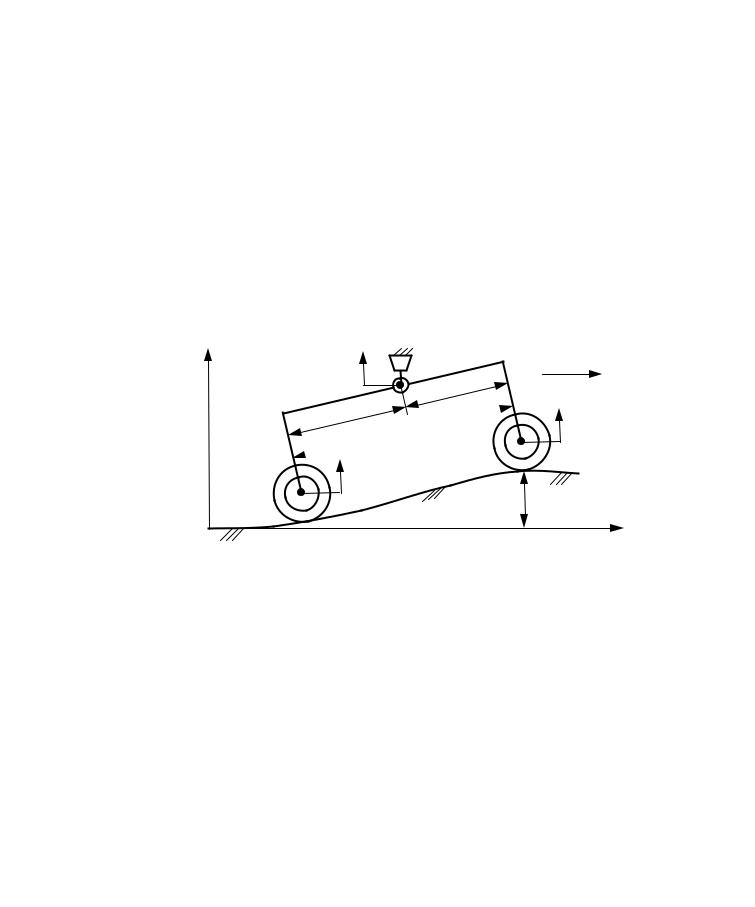
СНа р с. 3 представлена расчетная схема балансирной тележки, |
||||||||
где Lб – расстоян |
е между осями колес (база тележки); L1б, L2б |
– рас- |
||||||
|
от оси баланс ра соответственно до осей переднего и заднего |
|||||||
колес; fп – коорд ната опорной поверхности. |
|
|
|
|||||
|
Y0 |
|
|
|
|
V |
|
|
стояние |
|
|
|
|
|
|
||
|
|
YО |
|
|
L1б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L2 |
|
Lб |
YП |
|
|
|
|
б |
|
|
|
||||
|
|
|
|
|
||||
|
|
YЗ |
|
|
fп |
|
|
|
|
|
|
|
|
|
|
|
|
|
O0 |
А |
|
X0 |
|
|||
|
|
|
|
|
||||
|
Рис. 3. Расчетная схема балансирной тележки |
|
|
|||||
Введем понятие коэффициент базы балансира: |
|
|
|
|||||
|
|
|
L1б |
|
|
|
|
(1.1) |
|
|
K Д= . |
||||||
|
|
бб |
Lб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Согласно схеме на рис. 3 можно записать зависимость измене- |
||||||||
ния вертикальной координаты оси балансирной тележки YО от изме- |
||||||||
нении вертикальных координат осей соответственно переднего YП и |
||||||||
заднего YЗ колес балансирной тележки: |
|
И |
||||||
|
|
YО =(1−Kбб )Y П+KббYЗ . |
|
|
(1.2) |
|||
Важной частью балансирной тележки является колесо, передаю- |
||||||||
щее возмущающие воздействия от опорной поверхности к оси колеса. |
||||||||
Динамические свойства пневматического колеса, например переднего, |
||||||||
описываются передаточной функцией: |
|
|
|
|
|
|||
8

W |
(р)= YП ( р) |
= |
|
|
T2K p +1 |
|
|
, |
(1.3) |
|
|
|
|
|
|||||
K |
fп( p) |
|
T |
2 p2 +T |
p +1 |
|
|
||
|
|
|
|
||||||
|
|
|
|
1K |
2K |
|
|
|
|
где T1K и T2K – постоянные времени передаточной функции, завися-
щие от внутренней вязкости и жесткости шин.
Так как заднее колесо движется по неровностям опорной поверхности, находящимся под передним колесом, с запаздыванием τб, то можно записать уравнение для воздействия опорной поверхности
на заднее колесо fз во временной области |
|
|
|
||||||||||||
Сили операторной форме: |
fз(t) = fп(t – τб) |
|
|
(1.4) |
|||||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
fз( p) = fп( p)e−pτб ; |
(1.5) |
||||||||
|
|
|
|
|
|
|
|
τ |
= Lб |
V , |
|
|
(1.6) |
||
гдеженияV − скорость дв тележки. |
|
|
|
|
|
||||||||||
На основан |
формул (1.1) – (1.6) можно составить обобщенную |
||||||||||||||
структурную схему модели |
алансирной тележки (рис. 4). С учетом |
||||||||||||||
того, что в |
|
|
|
случаев алансирные тележки симметричны |
|||||||||||
|
|
большинстве |
|
|
|
||||||||||
L1б = L2б и Kбб = 0,5, структурная схема модели имеет вид (рис. 5). |
|||||||||||||||
|
|
|
|
YП |
|
|
|
|
|||||||
|
|
fп |
|
WK(p) |
|
1-Kбб |
|
|
|
|
|||||
|
|
|
|
|
А |
|
|||||||||
|
|
|
|
|
|
|
+ |
YО |
|||||||
|
|
|
|
|
|
|
|
fз |
|
|
YЗ |
|
+ |
|
|
|
|
|
|
e−pτб |
|
|
WK(p) |
|
|
Kбб |
|
|
|||
|
|
|
|
|
|
|
|
|
|
Д |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4. Обобщенная структурная схема модели балансирной тележки |
|||||||||||||||
|
|
|
|
|
|
|
YП |
|
|
|
|
И+ |
|||
|
|
fп |
|
WK(p) |
|
0,5 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YО |
|
|
|
|
|
|
|
|
fз |
|
|
YЗ |
|
+ |
|
|
|
|
|
|
e |
−pτб |
|
|
WK(p) |
|
|
0,5 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 5. Структурная схема модели симметричной балансирной тележки
9

Из формулы (1.2) и структурной схемы модели балансирной тележки (см. рис. 4) видно, что балансирная тележка снижает передачу воздействия от на ось YО < YП.
В табл. 1 приведены численные значения параметров математической модели балансирной тележки.
Таблица 1
|
|
Значения исследуемых параметров |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Варьируемые |
|
|
|
|
|
|
||
С |
Постоянные параметры модели |
|
|
||||||
|
V, м/c |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Т1K2, с2 |
|
|
|
|
|
0,001 |
|
|
|
Т2K, с |
|
|
|
|
|
0,08 |
|
|
|
|
|
|
параметры модели |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
L , м |
|
1 |
|
|
1 |
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
L1б , м |
|
0,3 |
|
0,4 |
0,5 |
0,6 |
0,7 |
|
|
Исследуемые показатели модели балансирной тележки |
|
|||||||
|
б |
|
|
|
|
||||
|
tпп, с |
|
|
|
|
||||
|
∆L, дБ |
А |
|
|
|||||
|
|
|
|
||||||
|
∆ϕ, ° |
|
|
|
|||||
1.Ознакомиться принципомДработы, расчетной схемой и математической моделью балансирной тележки.
2.Составить в обозначениях SimulinkИструктурную схему модели балансирной тележки по рис. 4.
3.Сформировать единичное ступенчатое воздействие опорной
поверхности под переднее колесо fп = 1(t). Для заданных численных значений параметров модели получить переходную временную характеристику системы и определить время переходного процесса tпп.
4.Для заданных численных значений параметров модели построить ЛАХ, ЛФХ и АФЧХ в LTI Viewer. Получить численные зна-
чения запасов устойчивости по амплитуде ∆L и фазе ∆ϕ. 5. Построить график характеристики tпп = f(Kбб).
10