

1094
.pdf
|
γРО = arctg |
YЗП −YЗЛ |
. |
|
|
(3.6) |
|||
|
|
|
|
|
|||||
|
|
|
|
|
L3 р |
|
|
|
|
учетом (3.6) уравнения (3.4) и (3.5) можно представить в виде |
|||||||||
|
Y |
=Y |
+ (YЗП −YЗЛ ) |
; |
(3.7) |
||||
|
РОП |
РО |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
=Y |
− (YЗП −YЗЛ ). |
(3.8) |
|||||
|
РОЛ |
РО |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для малых значен й γРО выражение (3.6) можно упростить: |
|
||||||||
С |
γРО ≈ tg γРО = |
YЗП −YЗЛ |
|
. |
(3.9) |
||||
|
L3 р |
|
|||||||
|
|
|
|
|
|
|
|
||
Особенность ЗТМ с ра очим органом в базе машины заключает- |
||||||||||
ся в том, что задн е колеса движутся по поверхности, сформирован- |
||||||||||
нойирабоч м органом. Изменения вертикальных координат опорной |
||||||||||
поверхности под правым и левым задними колесами |
|
|
|
|||||||
fзп(t) =YРОП (t −τп) или |
f |
зп( p) =YРОП ( p)e−pτп ; |
(3.10) |
|||||||
б |
−pτл |
, |
(3.11) |
|||||||
fзл(t) =YРОЛ (t −τл) или |
f |
|
зл( p) =YРОЛ ( p)e |
|
||||||
где τп и τл – время запаздывания, которые необходимы для прохожде- |
||||||||||
ния машиной расстояний LРОП и LРОЛ со скоростью V. |
|
|
|
|||||||
|
Д |
|
||||||||
|
|
L |
|
|
|
|
|
|
|
|
АРОП |
|
|
(3.12) |
|||||||
|
τп = |
|
V |
; |
|
|
|
|
||
|
τл = |
LРОЛ . |
|
|
(3.13) |
|||||
|
|
|
V |
|
|
|
|
|
|
|
Величины LРОП и LРОЛ зависят от угла захвата рабочего органа. |
||||||||||
L |
= L |
р |
+ |
|
L3 р |
tgϕ; |
|
|
(3.14) |
|
|
|
|
|
|||||||
РОП |
2 |
|
2 |
tgϕ.И(3.15) |
||||||
|
|
|
|
|||||||
L |
= L |
р |
− |
L3 р |
||||||
|
||||||||||
РОЛ |
2 |
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
Уравнения (3.1) – (3.15) с учетом динамических свойств пневматического колеса (формула (1.3)) позволяют построить структурную схему пространственной модели ЗТМ с рабочим органом в базе (рис. 13), наглядно иллюстрирующую алгоритм вычисления координат рабочего органа машины.
21
fпп |
WK(p) YПП |
+ |
|
|
|
|
|
|
|
|
|
|
1/2 |
YП |
|
1 – Kб |
|
|
|
||
|
|
|
|
|
|
|
||||
|
WK(p) YПЛ |
+ |
|
|
|
|
|
|
+ |
YPО |
|
|
|
|
|
|
|
|
|
||
|
|
|
YЗ |
|
|
|
+ |
|
||
|
+ |
|
1/2 |
Kб |
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
+ YЗП |
WK(p) |
fзп |
e |
−pτп |
YPOП |
+ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
– |
+ |
|
|
|
|
|
|
+ |
γPО |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1/2 |
|
|
2/L3р |
||
С |
YЗЛ |
WK(p) |
fзл |
YPOЛ |
– |
|||||
|
|
e |
−pτл |
|
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
+ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
. 13. Структурная схема пространственной модели ЗТМ с рабочим органом |
|||||||||
Рис |
в |
азе |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
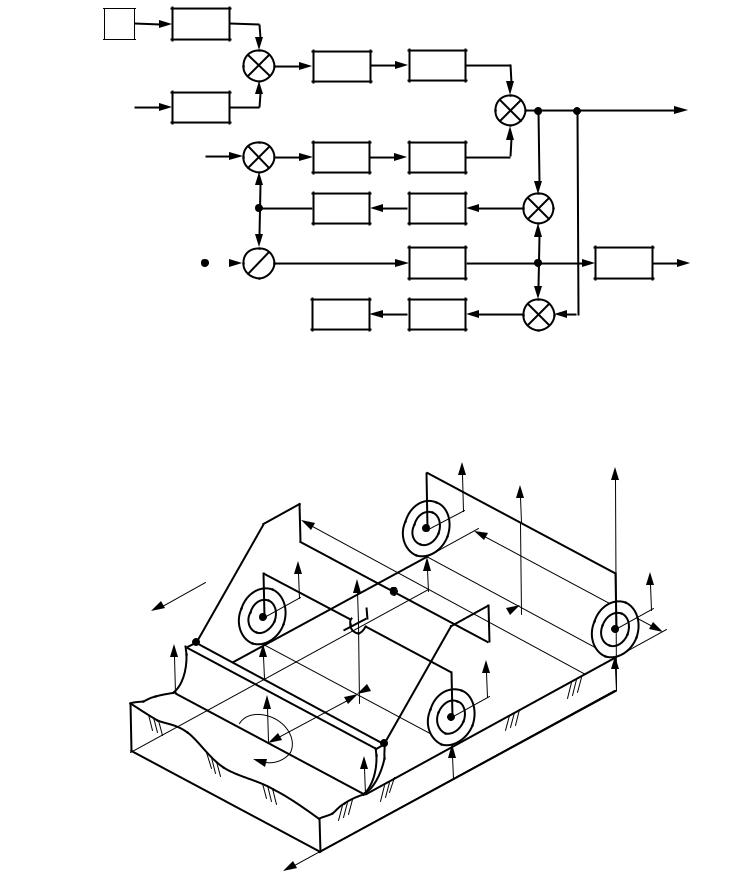
На рис. 14 представлена пространственная расчетная схема ЗТМ |
|||||||||
с рабочим органом, расположенным перед машиной. |
|
|||||||||
|
б |
YЗП |
YЗ |
Y0 |
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
Z0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|||||||
|
V |
YПП YП |
|
|
|
fзп |
|
L3р |
YЗЛ |
|
|
YPOП |
fпп |
|
Д |
||||||
|
|
L |
|
|
|
YПЛ |
fзл |
|
||
|
|
|
L1р |
|
|
|
|
O0 |
||
|
YPO |
|
|
|
|
|
|
|||
|
|
γPO |
YPOЛ |
|
|
|
fпл |
И |
||
X0
Рис. 14. Пространственная расчетная схема ЗТМ с рабочим органом перед базой
22

Особенности ЗТМ с рабочим органом перед машиной состоят в |
|||||||||||||||||||||||||||
том, что элементы ходового оборудования движутся по поверхности, |
|||||||||||||||||||||||||||
сформированной рабочим органом. Изменения вертикальных коорди- |
|||||||||||||||||||||||||||
нат опорной поверхности под правым и левым передними колесами |
|||||||||||||||||||||||||||
|
|
f |
пп |
(t) =Y |
|
(t −τ ) |
или f |
пп |
( p) =Y |
|
|
( p)e−pτ1 |
; |
|
(3.16) |
||||||||||||
|
|
|
|
|
РОП |
|
1 |
|
|
|
|
|
|
|
|
|
РОП |
|
|
|
|
|
|||||
|
|
f |
пл |
(t) =Y |
РОЛ |
(t −τ ) |
или f |
пл |
( p) =Y |
РОЛ |
( p)e−pτ1 |
; |
(3.17) |
||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
а изменен я коорд нат опорной поверхности под задними колесами |
|||||||||||||||||||||||||||
|
|
fзп(t) = fпп(t)(t −τL ) |
или fзп( p) = fпп(t)( p)e−pτL ; |
(3.18) |
|||||||||||||||||||||||
|
|
f |
(t) = f |
пл |
(t)(t −τ |
L |
) |
или f |
зл |
( p) = f |
пл |
(t)( p)e |
−pτL |
; |
(3.19) |
||||||||||||
Сзл |
|
|
|
L1 p |
; |
|
|
L |
, |
|
|
|
|
|
|
(3.20) |
|||||||||||
|
|
|
|
|
|
|
|
τ |
= |
τ |
L |
= |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
V |
V |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где τ1 |
– время запаздывания, которое необходимое для прохождения |
||||||||||||||||||||||||||
машинойрасстоян я L1p; τL – время запаздывания, которое необходи- |
|||||||||||||||||||||||||||
мое для прохожден я машиной расстояния L со скоростью V. |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
YРО = |
(1+ К |
|
)YП |
−КбYЗ . |
|
|
|
|
|
(3.21) |
||||||||||
Уравненияб(3.1), (3.2), (3.7) – (3.9), (3.16) – (3.21) с учетом дина- |
|||||||||||||||||||||||||||
мических свойств пневматического колеса (формула (1.3)) позволяют |
|||||||||||||||||||||||||||
построить структурную схему пространственной модели ЗТМ с рабо- |
|||||||||||||||||||||||||||
чим органом перед базой машины (рис. 15). |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
+ |
|
|
А |
|
|
|
YPО |
||||||||||||||||||
|
|
|
|
|
|
|
1/2 |
|
|
|
|
YП |
|
1 + Kб |
+ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
+ |
|
|
|
+ |
|
|
|
1/2 |
|
|
|
|
YЗ |
|
|
|
Kб |
|
|
|
– |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
|
|
|
YПП |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
||
|
|
|
|
|
WK(p) |
|
Дпп YPOП |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e−pτ1 |
|
|
|
|
|
|
|
|||||
|
YЗП |
WK(p) |
fзп |
e−pτL |
|
|
|
fпп |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
||||||
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/2 |
|
|
|
|
|
|
2 |
γPО |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
– |
YЗЛ |
WK(p) |
fзл |
e−pτL |
|
|
|
|
|
|
|
|
|
ИL3р |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
YПЛ |
WK(p) |
|
|
|
|
fпл |
|
e−pτ1 |
|
YPOЛ |
– |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 15. Структурная схема пространственной модели ЗТМ с рабочим органом |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
перед базой |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
23

|
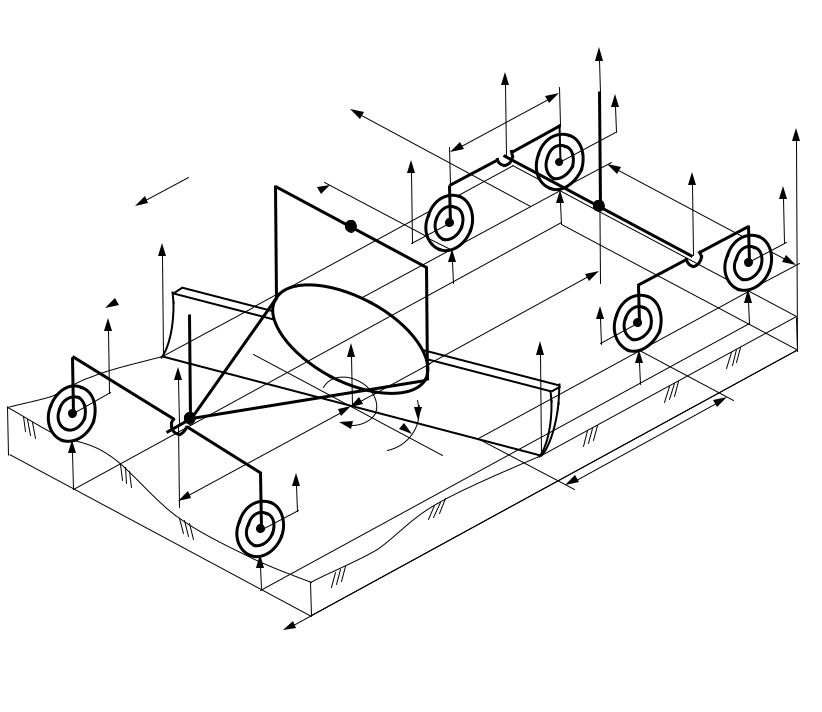
На рис. 16 представлена пространственная расчетная схема ЗТМ |
||||||||
с рабочим органом, расположенным за машиной. |
|
||||||||
|
|
|
|
V |
|
|
|
YП |
|
|
|
|
|
|
YПЛ |
|
|
X0 |
|
|
Y0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
С |
|
YЗЛ |
YЗ |
|
|
fпл |
|
L3р |
|
|
|
|
|
|
L |
|
YПП |
||
|
|
|
|
|
|
|
|||
|
fзл |
|
|
|
|
|
|
YЗП |
fпп |
|
YPOЛ |
YPO |
|
|
|
|
|
||
|
L2р |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
O0 |
|
|
|
|
|
|
|
|
L1р |
и fзп |
|
||||||||
|
|
γPO |
|
|
YPOП |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
Z |
|
|
|
|
|
б0 |
|
|
||||||
Рис. 16. Пространственная расчетная схема машины с рабочим органом за базой |
|||||||||
|
Особенность ЗТМ с рабочим органом за машиной состоит в том, |
||||||||
|
|
А |
|||||||
что элементы ходового оборудования перемещаются по необработан- |
|||||||||
ной поверхности. Изменения вертикальных координат опорной по- |
|||||||||
верхности под правым и левым задними колесами определяются фор- |
|||||||||
мулами (3.18) – (3.20), а координата центральной точки режущей |
|||||||||
кромки рабочего органа |
|
|
Д |
||||||
|
|
|
YРО = (1 − Кб )YП + Кб YЗ. |
(3.22) |
|||||
|
Уравнения (3.1), (3.2), (3.7) – (3.9), (3.18) – (3.20) и (3.22) с уче- |
||||||||
том динамических свойств пневматического колеса (формула (1.3)) |
|||||||||
позволяют построить структурную схему пространственнойИмодели |
|||||||||
ЗТМ с рабочим органом за базой (рис. 17). |
|
|
|||||||
|
Рассмотренные упрощенные пространственные расчетные схе- |
||||||||
мы различных типов ЗТМ и соответствующие им структурные схемы |
|||||||||
моделей позволяют проанализировать связь основных координат ма- |
|||||||||
шины и, следовательно, процесс формирования продольного и попе- |
|||||||||
речного профиля земляного полотна рабочим органом. |
|||||||||
24

|
|
|
|
|
YПП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
fпп |
|
WK(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
YПЛ |
+ |
|
|
|
|
|
|
|
|
|
YП |
|
|
+ |
|
|
YPО |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
WK(p) |
|
|
|
|
|
|
1/2 |
|
1 – Kб |
|
|
||||||||||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
fзп |
|
YЗП + |
|
|
|
|
|
|
|
YЗ |
|
|
|
+ |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
С |
WK(p) |
|
|
|
|
|
1/2 |
|
|
Kб |
|
|
|
|
|
||||||||||||
|
|
|
|
e−pτL |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
fзл |
|
|
|
YЗЛ |
|
|
+ |
|
|
|
|
|
|
|
|
γPО |
|
|
|
|
||
|
|
|
|
e−pτL |
|
WK(p) |
|
|
|
|
|
|
|
|
|
1/L3р |
Таблица 3 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Рис |
|
– |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. 17. |
труктурная схема пространственной модели ЗТМ с рабочим органом |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
за |
азой |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
В табл. 3 пр ведены численные значения параметров простран- |
||||||||||||||||||||||||
|
ственных схем ЗТМ с различными |
азовыми структурами. |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Постоянные параметры моделей |
|
|
|
|
|
|||||||||||||
|
|
|
|
V, м/c |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
2 |
, с |
2 |
|
|
|
|
|
|
|
|
|
|
0,001 |
|
|
|
|
|
|
||||
|
|
|
|
Т1K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Т2K, с |
|
|
|
|
|
|
|
|
|
|
|
0,08 |
|
|
|
|
|
|
|||||
|
|
|
|
Варьируемые и исследуемые параметры моделей |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
L, м |
|
|
3 |
|
|
|
3 |
|
|
|
3 |
|
3 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|||||||||||||
|
|
|
ЗТМ |
|
|
|
|
L1р, м 1 1,3 1,5 |
1,7 |
|
|
2 |
|
||||||||||||||
|
|
|
|
|
|
|
L2р, м |
|
|
2 |
|
|
|
1,7 |
|
|
|
1,5 |
|
1,3 |
|
|
1 |
|
|||
|
|
с рабочим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
L3р, м |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||
|
|
органом в базе |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
φ, град |
|
10 |
|
|
|
20 |
|
|
|
30 |
|
40 |
|
|
50 |
|
|||||
|
|
|
машины |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
tппYро, с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
γPO, рад |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ЗТМ |
|
|
|
|
L, м |
|
|
3 |
|
|
|
3,3 |
|
|
|
3,5 |
|
3,7 |
|
|
4 |
|
||
|
|
|
|
|
|
|
L1р, м |
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
1 |
|
|
1 |
|
|||
|
|
с рабочим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
L3р, м |
|
|
2 |
|
|
|
2,25 |
|
|
|
2,5 |
|
2,75 |
|
|
3 |
|
||||
|
|
органом перед |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
YPO(20 с), м |
|
|
|
|
|
|
|
|
И |
|
|||||||||||||
|
|
|
машиной |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
γPO(20 с), рад |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
ЗТМ |
|
|
|
|
L, м |
|
|
3 |
|
|
|
3,2 |
|
|
|
3,5 |
|
3,7 |
|
|
4 |
|
||
|
|
|
|
|
|
|
L1р, м |
|
|
4 |
|
|
|
4,2 |
|
|
|
4,5 |
|
4,7 |
|
|
5 |
|
|||
|
|
с рабочим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
L3р, м |
|
|
2 |
|
|
|
2,25 |
|
|
|
2,5 |
|
2,75 |
|
|
3 |
|
||||
|
|
органом за |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
tппYро, с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
машиной |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
tппγро, c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
25
Порядок выполнения работы
1.Ознакомиться с тремя пространственными схемами ЗТМ.
2.оставить в обозначениях Simulink структурные схемы ЗТМ
по рис. 13, 15 ,17. Звено запаздывания − из подраздела библиотеки
Simulink Extras > Linearization, параметр звена Pade Order (for linearization) = 1.
3. Для каждой структурной схемы сформировать единичное ступенчатое воздейств е fпп = 1(t), как показано на структурных схемах.
4. Для ЗТМ с р абочим органом в базе для численных значений
параметров |
з табл. 3, получить по линеаризированным переходным |
С |
|
характер ст |
кам (Control Design > Linear Analysis): |
• |
ч сленные значения времени переходного процесса вер- |
нии Кб = 1/3.б
коорд наты ра очего органа tппYро и график зависимости
tппYро = f(Кб) при ф кс рованном значении φ = 10°; |
|
тикальной |
|
• |
ч сленные значения угла поперечного наклона рабочего |
органа γPO |
граф к зав симости γPO = f(φ) при фиксированном значе- |
5.Для ЗТМ с ра очим органом перед базой для численных значений параметров из та л. 3 получить по переходным характеристикам из Scope:
•численные значения вертикальной координаты рабочего
органа YPO и график зависимости YPO = f(Кб) при фиксированном значении L3р = 3 м и времени моделирования 20 с;
•численные значения угла перекоса рабочего органа γPO и график зависимости γPO = f(L3р) при фиксированном значении Кб = 1/4
ивремени моделирования 20 с.
6.Для ЗТМ с рабочим органом за базой для численных значений параметров из табл. 3 получить по линеаризированным переход-
ным характеристикам (Control Design > Linear Analysis):
•численные значения времени переходного процесса вер-
тикальной координаты рабочего органа tппYро и график зависимости tппYро = f(Кб) при фиксированном значении L3р = 2 м;
•численные значения времени переходного процесса угла
поперечного наклона рабочего органа tппγPO и график зависимости tппγPO = f(L3р) при фиксированном значении Кб = 4/3.АИ
26
|
Содержание отчета |
1. |
Расчетные и структурные схемы основных типов ЗТМ. |
2. |
труктурные схемы ЗТМ в обозначениях Simulink. |
3. |
Переходные временные характеристики каждого типа ЗТМ |
С |
|
по вертикальной координате рабочего органа YPO и углу поперечного
наклона рабочего органа γPO для одного из заданных численных значений параметров в табл. 3.
4. |
Ч сленные значения исследуемых параметров в табл. 3. |
|
5. |
Граф ки функциональных зависимостей, описанных в пунк- |
|
и |
|
|
тах 4, |
5, 6 порядка выполнения работы [tппYро = f(Кб); γPO = |
f(φ); |
YPO = f(Кб); γPO = f(L3р); tппγPO = f(L3р)]. |
|
|
6. |
Выводы по полученным зависимостям об устойчивости каж- |
|
дого т па ЗТМ в продольной и поперечной плоскостях и влиянии конструкт вныхбпараметров машины на её переходные характеристики.
Контрольные вопросы и задания
1.Что такое структура ЗТМ?
2.Какие основные структуры ЗТМ по положению рабочего органа относительно азы машины выделяют?
3.Какие два основных параметра пространственного положения рабочего органа рассматриваются при формировании земляного полотна?
4.Чем отличается угол захвата от угла поперечного наклона рабочего органа?
5.По полученным переходным характеристикам сделать выводы об устойчивости каждого типа ЗТМ в продольной и поперечной плоскостях.
6.Для указанного типа ЗТМ по структурной схеме пространственной модели пояснить алгоритм вычисления координат рабочего органа машины.
7.Для указанного типа ЗТМ дать анализ построенных зависимостей. АИ
27
Лабораторная работа №4
ИССЛЕДОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ АВТОГРЕЙДЕРА
Цели работы − провести исследование математической модели автогрейдера, выявить влияние основных геометрических параметров машины на процесс формирования продольного и поперечного профиля обрабатываемой поверхности рабочим органом.
Оп сан е работы. При анализе формирования поверхности об- |
||
рабатываемого грунта необходимо рассматривать пространственную |
||
С |
|
|
расчетную схему автогрейдера с балансирными тележками, отра- |
||
жающую упруго-вязк е свойства колес, движущихся по неровностям |
||
микрорельефа. |
|
|
При составлен |
расчетной схемы автогрейдера (рис. 18) были |
|
|
следующ е допущения: |
|
приняты |
||
• |
автогрейдер |
представлен пространственным шарнирно со- |
члененным многозвенн ком; |
||
• люфты в шарнирах отсутствуют; |
|
• |
звеньяба солютно жесткие; |
• |
динамические свойства колес представлены колебательными |
звеньями второго порядка; |
Д |
|
• гидроцилиндры рабочего органа абсолютно жесткие; |
||
• |
все колеса имеютАпостоянный контакт с грунтом; |
|
• |
режущая кромка рабочего органа из грунта не выглубляется; |
|
• уплотнение грунта под колесами не учитывается;
• скорость движения машины постоянна.
На рис. 18 изображена пространственная расчетная схема автогрейдера со следующими геометрическими параметрами:
•L – длина базы (расстояние между осью передних колес и осью заднего балансира);
•L1р – расстояние от оси передних колес до центральной точки режущей кромки рабочего органа;
•L2р – расстояние от центральной точки режущей кромки рабочего органа до оси заднего балансира;
•L3р – ширина базы машины;
•Lб – длина балансирной тележки;
•LРО – ширина рабочего органа; И
28
• L2рп, L2рл – расстояние от режущей кромки рабочего органа до осей балансирной тележки соответственно по правой и левой колее;
• YРО, YРОП, YРОЛ – изменения вертикальных координат режущей кромки рабочего органа: соответственно центральной,
правого и левого края; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
• |
YП, YЗ, |
YПП, |
|
YПЛ |
– |
изменения |
вертикальных |
координат |
|||||||
соответственно переднего шарнира рамы машины, центра задней оси |
|||||||||||||||
баланс рной тележки, осей правого и левого передних колес; |
|
||||||||||||||
• YЗП, YЗП1, YЗП2 |
– |
изменения |
вертикальных |
координат |
|||||||||||
оси |
|
|
|
|
|
|
|
|
|
|
|||||
соответственно оси правого балансира, осей переднего и заднего |
|||||||||||||||
колес правого баланс |
ра; |
|
|
|
|
|
|
|
|
|
|
|
|||
• YЗЛ, YЗЛ1, YЗЛ2 – изменения вертикальных координат |
|||||||||||||||
соответственно |
левого |
алансира, осей переднего и заднего колес |
|||||||||||||
|
б |
|
|
|
|
|
|
|
|||||||
левого баланс ра; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
• φ – угол захвата ра |
очего органа; |
|
|
|
|
|
|
||||||||
• γРО – угол поперечного наклона рабочего органа; |
|
|
|||||||||||||
• V – поступательная скорость машины. |
|
|
|
|
|||||||||||
|
|
А |
|
|
|||||||||||
Из пространственной расчетной схемы на рис. 18 можно запи- |
|||||||||||||||
сать зависимость изменения вертикальных координат рабочего органа |
|||||||||||||||
YРОП, YРОЛ, YРО и угла поперечного наклона рабочего органа γРО от из- |
|||||||||||||||
менении вертикальных координат осей колес и рамы машины: |
|
||||||||||||||
|
|
|
|
|
|
|
Д |
|
|||||||
|
|
|
|
YРО = (1 − К |
б )YП + КбYЗ |
; |
|
|
(4.1) |
||||||
|
|
|
|
YП =0,5(YПЛ +YПП ); |
|
|
|
|
(4.2) |
||||||
|
|
|
|
YЗ = 0,5(YЗП +YЗЛ ); |
|
|
|
|
(4.3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
И |
||||
|
|
|
|
YЗП = 0,5(YЗП1 +YЗП2 ); |
|
|
|
(4.4) |
|||||||
|
|
|
|
YЗЛ = 0,5(YЗЛ1 +YЗЛ2 ); |
|
|
|
(4.5) |
|||||||
|
γРО ≈ tg γРО =(YЗП −YЗЛ )/ L3 p =(YРОП −YРОЛ )/ LРО ; |
(4.6) |
|||||||||||||
|
Y |
=Y |
|
+ LРО tg γ |
РО |
=Y |
+ LРО (YЗП −YЗЛ ); |
|
(4.7) |
||||||
|
РОП |
РО |
2 |
|
|
РО |
|
2 |
L3 p |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Y |
=Y |
|
− LРО tg γ |
РО |
=Y |
− LРО |
(YЗП −YЗЛ ) |
. |
|
(4.8) |
||||
|
|
|
|
||||||||||||
|
РОЛ |
РО |
|
2 |
|
|
РО |
|
2 |
L3 p |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
29
С |
|
|
|
YЗП |
Lб |
|
YЗ |
|
|
||
|
Z0 |
|
|
YЗП2 |
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Y0 |
|||
|
YЗП1 |
|
|
|
|
|
|
||||
|
V |
|
|
|
|
|
L3р |
YЗЛ |
|
||
|
|
|
|
|
|
|
|
fзп2 |
YЗЛ2 |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
L2рп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
|
|
fзп1 |
|
|
|
|
|
||
|
YPOП |
|
|
|
|
L2р |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
YПП |
|
б YЗЛ1 |
|
|
fзл2 |
||||||
|
|
|
O0 |
||||||||
|
|
|
|
|
|
YPOЛ |
|
|
|
||
|
YП |
|
YPO |
|
|
|
fзл1 |
|
|||
|
|
|
|
|
|
|
|
||||
|
L1р А |
|
|
||||||||
|
|
|
|
|
|||||||
fпп |
|
γPO |
|
φ |
|
|
|
|
L2рл |
|
|
|
|
|
|
Д |
|
|
|||||
|
|
YПЛ |
|
|
|
|
|||||
|
|
fпл |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X0 |
|
|
Рис. 18. Пространственная расчетная схема автогрейдера |
||||||
|
|
|
|
|
И |
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
30 |
|
|
|
|
|
|