

1070
.pdfНа правах рукописи
КОТЬКИН СТАНИСЛАВ ВЯЧЕСЛАВОВИЧ
СИСТЕМА АВТОМАТИЗАЦИИ МОДЕЛИРОВАНИЯ СТРЕЛОВЫХ ГРУЗОПОДЪЕМНЫХ КРАНОВ
Специальность 05.13.12 – Системы автоматизации проектирования (промышленность)
АВТОРЕФЕРАТ диссертации на соискание ученой степени
кандидата технических наук
Омск – 2012

Работа выполнена в ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)».
Научный руководитель: доктор технических наук, профессор Щербаков Виталий Сергеевич,
декан факультета «Нефтегазовая и строительная техника» ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)»
Официальные оппоненты: доктор технических наук, профессор Файзуллин Рашит Тагирович, проректор по информатизации ФГБОУ ВПО
«Омский государственный технический университет»
кандидат технических наук Малахов Иван Игоревич,
заведующий кафедрой «Специальных технических дисциплин» Омского института водного транспорта (филиал) ФБОУ ВПО «Новосибирская государственная академия водного транспорта»
Ведущая организация: |
Федеральное |
государственное |
бюджетное |
|
|
учреждение |
высшего |
профессионального |
|
|
образования |
«Омский |
государственный |
|
|
университет путей сообщения», г. Омск |
|||
Защита диссертации состоится 28 мая 2012 г. в 14.00 ч. на заседании объединенного диссертационного совета ДМ 212.250.03 при ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)» по адресу: 644080, г. Омск, пр. Мира, 5, зал заседаний.
С диссертацией можно ознакомиться в библиотеке ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия (СибАДИ)» по адресу: 644080, г. Омск, пр. Мира, 5.
Отзывы на автореферат направлять по |
адресу: 644080, г. Омск, |
пр. Мира, 5, тел, факс: (3812) 65-03-23, e-mail: arkhipenko_m@sibadi.org. |
|
Автореферат разослан 25 апреля 2012 г. |
|
Ученый секретарь объединенного |
|
диссертационного совета ДМ 212.250.03, |
|
кандидат технических наук |
М.Ю. Архипенко |
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Стреловые грузоподъемные краны (СГК) являются наиболее распространенным средством механизации и автоматизации работ во всех отраслях промышленности. От их совершенства во многом зависит эффективность монтажных и погрузоразгрузочных работ на промышленных предприятиях. В связи с этим остро стоит проблема создания и повышения эффективности функционирования систем автоматизированного проектирования (САПР) узлов, агрегатов, устройств управления, металлоконструкций и в целом СГК. Высокое качество проектных работ СГК может быть достигнуто только на основе использования современных методов моделирования и инженерного анализа. Выше изложенным объясняется актуальность темы – создание системы автоматизации моделирования СГК, без которой невозможно решение задач анализа и синтеза проектных решений образцов новой техники.
Работа посвящена разработке и исследованию модели СГК, алгоритмов и методик для анализа и синтеза проектных решений.
Одним из важнейших направлений совершенствования СГК является повышение их эффективности за счет снижения энергетических затрат. Повышение энергетической эффективности СГК осуществляется за счет оптимизации траекторий перемещения грузов, с помощью систем автоматического управления на базе микропроцессорной техники.
Цель диссертационной работы заключается в разработке методики и алгоритмов системы автоматизации моделирования рабочих процессовСГК.
Для достижения поставленной цели решены следующие задачи:
1.Разработана совокупность математических моделей подсистем сложной динамической системы рабочего процесса СГК;
2.Обоснован критерий энергетической эффективности перемещения грузов СГК;
3.Разработана методика и алгоритмы автоматизации моделирования рабочих процессов СГК и оптимизации их технологических параметров;
4.Выявлены закономерности, связывающие технологические параметры с критерием энергетической эффективности;
5.Разработаны алгоритмы и программное обеспечение, подтверждающие эффективность предложенных методик автоматизации моделирования и оптимизации технологических параметров рабочего процесса сложной динамической системы СГК.
Объектом исследования является процесс автоматизации моделирования СГК.
Предметом исследования являются закономерности процесса автоматизации моделирования СГК.
3
Методы исследования. При выполнении работы использовались методы системного анализа, регрессионного анализа, теории алгоритмов, математического и имитационного моделирования. Теоретические исследования проводились в среде Simulink программного комплекса
MATLAB.
Научная новизна работы:
1.Разработана математическая модель сложной динамической системы СГК, позволяющая в автоматизированном режиме решать задачи анализа на этапах проектирования СГК;
2.Получены многофакторные регрессионные уравнения, устанавливающие взаимосвязь удельных энергетических затрат от технологических параметров при изменении управляемых координат СГК,
ипозволяющие получить значения расхода топлива ДВС для заданных перемещений грузов;
3.Разработан алгоритм аналитического решения обратной задачи кинематики СГК для реализации требуемой траектории перемещениягруза;
4.Разработан алгоритм оптимизации по энергетическому критерию технологических параметров рабочего процесса, с учетом кинематической избыточности СГК;
5.Разработан алгоритм определения оптимальных значений координат базового шасси СГК на рабочей площадке, с учетом запретных для расположения зон.
Практическая ценность работы. Применение разработанных алгоритмов и программного обеспечения в качестве модуля САПР позволяет решать задачи анализа и синтеза оптимальных конструктивных параметров СГК. Предложенные методики и алгоритмы автоматизации моделирования рабочих процессов СГК позволяют анализировать различные конструкторские решения на этапах проектирования СГК, управлять качеством проектных работ. Полученные алгоритмические решения позволяют снизить энергетические затраты за счет оптимизации законов движения и положения СГК и могут быть использованы при создании систем автоматического управления СГК.
Апробация работы. Результаты исследований и основные положения диссертации докладывались на следующих конференциях: V, VI Всероссийских научно-практических конференциях студентов, аспирантов и молодых ученых «Развитие дорожно-транспортного комплекса и строительной инфраструктуры на основе рационального природопользования» (Омск, 2010, 2011); Региональной научнотехнической конференции молодых ученых, студентов, аспирантов (с международным участием) «Новые технологии на транспорте в энергетике
истроительстве» (Омск, 2010); XII Международной научноинновационной конференции студентов, аспирантов и молодых ученых с элементами научной школы «Теоретические знания – в практические дела» (Омск, 2011); Межрегиональной научно-практической конференции
4
«Производство, модернизация, эксплуатация многоцелевых гусеничных и колесных машин. Подготовка специалистов» (Омск, 2011); юбилейном международном конгрессе «Креативные подходы в образовательной, научной и производственной деятельности» (Омск, 2010); V Всероссийской научно-технической конференции «Актуальные вопросы строительства» (Омск, 2012); научных семинарах кафедры «Автоматизация производственных процессов и электротехника» ФГБОУ ВПО «Сибирская государственная автомобильно-дорожная академия».
Публикации. Положения диссертации и основные результаты исследований опубликованы в 11 печатных работах (из них 4 - в изданиях, рекомендованных ВАК), получено одно свидетельство об отраслевой регистрации электронных ресурсов ОФЕРНИО (алгоритмов).
Структура и объем диссертации. Диссертационная работа состоит из введения, пяти глав с выводами, заключения, списка использованных источников, включающего 94 наименования, приложений. Общий объем диссертации 147 страниц, включая 80 рисунков, 9 таблиц и 2 приложения.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы диссертационной работы, определены цель и задачи исследования, показаны научная новизна и практическая значимость работы.
В первой главе диссертационной работы произведен анализ тенденций развития СГК и их систем автоматического управления, дается обзор и анализ конструкций СГК, обзор предшествующих работ по методам моделирования СГК. Рассмотрены современные САПР и системы автоматизации моделирования сложных динамических систем. Сформулированы цель и задачи работы.
Во второй главе обоснована общая методика исследования, которая носит комплексный характер и предусматривает как теоретические, так и экспериментальные исследования. Проведен анализ СГК как сложной динамической системы, состоящей из механической подсистемы, подсистем гидропривода и двигателя внутреннего сгорания (ДВС). Определены структурные элементы и связи, входящие в состав модели.
На рисунке 1 представлена блок-схема сложной динамической системы СГК, на которой изображены подсистемы ДВС, гидропривода и механическая подсистема. Подсистема гидропривода представлена блоками: насос, гидроцилиндры, гидравлические распределители, гидромоторы и механические передачи. В механическую подсистему СГК входят следующие блоки: грунт, базовое шасси, поворотная платформа, стрела, телескопическое звено, грузовая лебедка, крюковая обойма с грузом.
5

|
|
7 |
3 |
Механическая подсистема |
35 |
Базовое шасси |
Грунт |
|
|
8 |
|
|||
|
|
|
|
4
Поворотнаяплатформа  36
36 29 30
29 30
Механи- |
|
ческая |
|
передача |
|
21 |
22 |
|
|
|
|
|
|
Стрела |
|
|
|
Телескопи- |
|
37 |
|
||||
|
|
|
|
ческое звено |
|
|
|
|
|
||
31 32
|
|
Механи- |
|
23 |
24 |
ческая |
|
|
|
передача |
|
|
|
25 |
26 |
38 |
Груз |
|
|
33 |
34 |
Механи- |
|
ческая |
|
передача |
|
27 |
28 |
Гидро- |
|
|
|
Гидро- |
|
Гидро- |
|
|
Гидро- |
|
|||||||
мотор1 |
|
|
|
цилиндр1 |
|
цилиндр2 |
|
мотор2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
|
15 |
16 |
|
17 |
18 |
|
19 |
20 |
|
|
|||||
|
13 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гидравлические распределители |
|
|
|
2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
12 |
|
|
|
|
|
Насос |
10 |
Механи- |
6 |
ДВС |
1 |
|
9 |
ческая |
5 |
||||
|
||||||
|
|
передача |
|
|
|
|
Подсистема гидропривод |
|
Подсистема ДВС |
|
|||
Рисунок 1 – Блок-схема сложной динамической системы стрелового грузоподъемного крана
Блоки соединены между собой связями, отражающими влияние одних блоков на другие. Объемные стрелки обозначают многопараметрические связи. Рассмотрение СГК как сложной динамической системы позволило выделить основные этапы автоматизированного построения модели. Теоретические исследования выполнены методами математического и имитационного моделирования. При построении регрессионной модели энергетических затрат использовались методы регрессионного анализа. При разработке методики
оптимизации технологических параметров рабочего процесса СГК применена теория алгоритмов.
Математическое описание механической подсистемы СГК основывалось на следующих допущениях: СГК представляет собой шарнирно-сочлененный пространственный многозвенник, с наложенными на него упруго-вязкими связями; элементы металлоконструкций представляются абсолютно жесткими; инерционные свойства элементов металлоконструкций характеризуются массами, координатами центров масс, осевыми моментами инерции, центробежными моментами инерции; люфты в шарнирах отсутствуют; связи, наложенные на динамическую систему СГК, являются голономными и стационарными; внешние силы, действующие на звенья механической подсистемы СГК, являются сосредоточенными.
При моделировании гидропривода СГК были приняты следующие допущения: влияние волновых процессов на динамику гидропривода не учитывается; инерционные свойства жидкости в элементах гидропривода не учитываются; плотность, кинематическая вязкость, модуль упругости жидкости и коэффициент расхода элементов гидропривода принимают постоянные значения на протяжении моделирования; переход между ламинарным и турбулентными режимами происходит мгновенно; силы инерции и трения в элементах конструкции гидравлических устройств не учитываются.
6

Обоснована методика экспериментальных исследований, предусматривающая проведение пассивного натурного эксперимента и активного вычислительного эксперимента на имитационной модели СГК. В соответствии с целью и задачами работы и принятой методикой исследований определена структура работы.
В третьей главе представлены математические модели подсистем сложной динамической системы СГК. На рисунке 2 изображена обобщенная расчетная схема механической подсистемы СГК, представляющая собой систему с пятью массами, звеньями которой являются: базовое шасси массой m1, включающее в себя массу ходовой рамы; поворотная платформа массой m2, включающая в себя массы кабины, противовеса и лебедки; стрела массой m3; телескопическое звено массой m4; груз массой m5, включающий в себя массу крюковой обоймы, траверсы. Расчетная схема СГК рассматривается в правой инерциальной системе координат O0X0Y0Z0.
|
|
|
|
|
|
|
|
|
c13,b13 |
Y5 |
|
c14,b14 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
X4 |
|
|
|
|
|
|
|
|
|
m4 |
|
O5 |
X5 |
|
|
|
|
|
|
|
|
c19,b19 |
|
c15,b15 |
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Z5 |
|
||
|
|
|
|
|
|
|
|
Y4 |
Fm4 |
|
|
|
|
|
|
|
|
|
|
|
m3 |
X3 |
|
|
|
|
|
|
|
|
|
|
|
Z4 |
O4 |
|
c16,b16 |
|
|
|
|
|
Y3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
Fm3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y , Y |
Z3 |
O3 |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
c18,b18 |
|
|
|
|
|
|
c10,b10 |
|
|
|
|
|
|
|
m5 |
|
||
|
|
R6 m2 |
|
O2 |
|
|
X2 c11,b11 |
|
|
|||
|
|
c6,bF6 |
|
|
|
c7,b7 FR7 |
|
|
||||
|
|
|
|
O1 |
|
|
Fm5 |
|
||||
|
c2,b2 |
|
Fm2Z2 |
|
|
X1 |
c3,b3 |
|
|
|||
|
FR10 |
m1 |
|
|
|
|
|
|
|
|
||
|
|
|
c17,b17 |
FR11 |
FR3 |
|
|
|
||||
|
FR2 |
|
|
Z1 |
|
Y0 |
|
|
||||
|
|
Fm1 |
|
|
|
|
|
|
||||
c9,b9 |
|
|
c12,b12 |
|
|
|
|
|
|
|
||
|
c5,b5 FR5 |
|
|
|
|
|
|
c8,b8FR8 |
|
|
|
|
FR9 |
c1,b1 |
|
|
|
FR12 |
|
c4,b4 |
|
O0 |
|
X0 |
|
FR1 |
|
|
|
FR4 |
|
Z0 |
|
|
||||
|
|
|
|
|
|
|
|
|
||||
Рисунок 2 – Обобщенная расчетная схема стрелового грузоподъемного крана
7
8
|
|
Поворотная платформа |
|
1 |
B |
CS2 |
2 |
|
F |
||
Port1 |
CS1 |
Port2 |
|
|
|
CS3 |
|
|
Revolute |
Body |
3 |
|
|
(Поворотная платформа ) |
Port3 |
|
|
q7 |
|
|
|
1 |
|
|
|
To Workspace |
|
|
|
In1 |
|
|
|
|
|
|
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
|
Joint Sensor |
-K- |
|
|
|
|
|
|
|
Gain1 |
|
Joint Actuator |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Стрела |
||
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Port2 |
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CS1 |
CS2 |
|
|
|
|
|
|
3 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CS3 |
|
|
|
|
|
|
Port3 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Revolute |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
To |
|
q8 |
|
(Основание |
стрелы ) |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Workspace1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
Joint Sensor |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
B |
F |
|
|
|
|
|
CS1 |
CS2 |
|
|
|
B |
|
F |
|
|
|
|
CS1 |
CS2 |
|
|
|
|
|
F |
B |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Port1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Revolute1 |
|
|
|
|
|
|
|
Revolute2 |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
(Корпус |
ГЦ) |
|
|
|
|
|
|
|
|
|
|
|
(Шток ГЦ) |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
Prismatic |
|
1 |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In1 |
||
IC |
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
|
Joint Sensor1 |
-K- |
|
|
|
|
|
|
|
Gain1 |
|
Joint Actuator |
|
|
|
1 |
B |
Телескопическое звено |
|
|
|
||
Port1 |
F |
CS1 CS2 |
2 |
|
|
|
Port2 |
|
Prismatic1 |
Body |
|
|
|
(Телескопическое |
звено) |
|
|
q9 |
1 |
|
|
To Workspace |
In1 |
|
|
-K- |
1 |
|
|
Out1 |
|
|
|
|
|
m |
|
Gain |
Joint Sensor |
-K- |
|
|
|
|
|
Gain1 |
Joint Actuator |
|
|
|
|
|
|
|
|
|
|
|
Базовое шасси |
|
|
|
|
|
|
|
Port1 |
|
|
|
|
|
|
|
|
|
|
CS1 |
Port1 |
F |
|
|
|
|
|
|
|
|
|
|
Env |
|
B |
y |
|
||
|
|
Базовое шасси |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
Subsystem Force1 |
|
|||||||
|
|
|
1 |
|
Machine |
|
F |
CG |
|
||||||
|
|
|
|
|
|
|
|
Ground |
|
|
|
||||
|
In1 |
|
|
|
|
|
Angle |
|
Environment |
|
|
|
F |
|
|
|
Port1 |
|
|
|
|
|
|
|
|
|
|
CS2 |
Port1 |
|
|
|
|
|
|
|
Out1 |
1 |
|
|
|
|
y |
|
|||
|
Port2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Bushing |
|
Subsystem Force2 |
|
||||
|
|
|
|
|
|
Torque |
|
|
|
|
FRi |
||||
|
Port3 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Поворотная |
платформа |
2 |
|
|
|
|
CS3 |
Port1 |
F |
Scope |
||||
|
|
|
|
|
|
|
|
Joint Sensor |
|
y |
|
||||
|
In1 |
|
|
|
|
|
Position |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Subsystem Force3 |
|
|||
|
Port1 |
|
|
|
|
Out1 |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
CS5 |
|
|
|
|||
|
Port2 |
|
|
|
|
|
|
Joint Sensor1 |
|
|
|
||||
|
|
|
|
|
|
Force |
|
|
Port1 |
|
|
F |
|
||
|
Port3 |
|
|
|
|
|
|
|
|
CS4 |
Port1 |
|
|||
|
Стрела |
|
|
|
|
|
|
|
y |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
3 |
|
Joint Sensor2 |
|
|
Subsystem Force4 |
|
|||||
|
|
|
|
|
|
|
|
q1..q6 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
In1 |
|
|
|
|
|
Position1 |
|
|
|
Body |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Port1 |
|
|
|
|
Out1 |
3 |
|
|
Joint Sensor3 |
Scope1 (Базовое шасси ) |
|
|
||
|
Port2 |
|
|
|
|
|
Force1 |
|
|
|
q1_6 |
|
|
|
Scope4 |
|
|
|
|
|
|
|
|
Joint Sensor4 |
|
|
|
|
|||
|
Телескопическое звено |
|
|
|
|
|
|
|
|||||||
|
4 |
|
|
|
To Workspace |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
In1 |
|
|
|
|
|
Position2 |
|
|
Joint Sensor5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Port |
|
|
|
|
Out1 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Force2 |
|
Joint Initial |
|
|
|
|
|
|
|
|
|
|
Груз |
|
|
|
|
Condition |
|
|
|
|
|
|
|
1 |
B |
|
|
|
|
|
|
Груз |
|
|
|
Определение сил реакции на опорныйэлемент |
|||
|
|
|
|
|
|
|
|
|
|
x_0 |
|
|
|
||
Port |
F |
CS1 |
CG |
|
|
|
|
|
|
|
|
Constant3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
-K- |
|
1 |
|
|
|
Body ( Груз) |
|
Body Sensor |
X,Y,Z |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
Bearing |
|
|
|
|
|
|
|
Gain6 |
|
F |
||||
|
|
|
q10 |
|
1 |
|
|
|
2 |
y_0 |
|
||||
Joint Initial |
|
To Workspace4 |
|
In1 |
|
|
|
y |
Constant1 |
-K- |
|
|
|||
|
|
|
|
|
|
|
|
|
y |
|
|
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
Condition |
|
|
-K- |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Out1 |
|
|
|
|
z_0 |
Gain2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Body Actuator2 |
||||
|
|
m |
|
Gain3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
Constant4 |
|
|
|
|||
|
|
-K- |
|
|
|
|
|
|
|
|
z |
-K- |
|
|
|
|
Joint Sensor |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Gain7 |
|
|
||
|
|
Gain5 |
|
|
Joint Actuator |
|
|
|
m |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1 |
Body Sensor1 |
|
|
-K- |
|
|
|
|
|
|
|
|
|
|
|
Port1 |
x' |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mechanical |
|
q11 |
|
|
|
|
|
|
Mechanical |
|
|
|
Gain4 |
|
|
|
|
|
|
|
|
|
Branching |
|
|
|
|
|
|
||
Branching |
To Workspace |
|
|
|
|
|
|
|
|
|
|
||||
-K- |
|
|
|
Bar1 |
|
|
|
-K- |
|
|
|||||
Bar3 |
|
|
|
|
|
|
|
|
y' |
|
|
|
|||
Joint SensorR1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Gain |
|
Joint Actuator R1 |
|
|
|
Gain1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
q13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
To Workspace1 |
-K- |
|
|
|
|
|
z' |
|
-K- |
|
|
|||
|
Joint SensorR2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Gain2 |
|
Joint Actuator R2 |
|
|
|
|
Gain3 |
|
|
||
|
|
|
|
|
-K- |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
q12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gain1 |
|
|
|
|
|
|
|
|
||
|
To Workspace2 |
|
|
|
|
|
|
|
|
|
|||||
|
Joint SensorR3 |
0 |
|
|
|
-K- |
Joint Actuator R3 |
|
|
|
|
|
|
|
|
|
Mechanical |
Constant1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Mechanical |
|
|
|
|
|
|
|
|||
|
Branching |
|
|
Gain4 |
|
|
|
|
|
|
|
||||
|
Bar1 |
|
|
|
|
Branching |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Bar2 |
|
|
|
|
|
|
|
Рисунок 3 – Структурная схема механической подсистемы стрелового грузоподъемного крана в Simulink (пунктирными линиями обозначены блоки звеньев)
Каждому звену поставлена соответствующая локальная система координат. Массы звеньев в поле тяготения формируют силы веса, представленные на расчетной схеме векторами Fm1… Fm5. Со стороны грунта на опорные элементы действуют силы реакции, представленные на расчетной схеме векторами FR1… FR12. Упруго-вязкие свойства связей, наложенных на звенья системы, представлены на расчетной схеме упруговязкими телами Фохта, характеризуемыми коэффициентами жесткости c1…c19 и коэффициентами вязкости b1…b19. Для расчетной схемы СГК приняты 13 обобщенных координат q1…q13 (таблица 1). Структурная схема механической подсистемы СГК в Simulink представлена на рисунке 3.
Таблица 1 – Обобщенные координаты q1…q13
№ |
Характеристика координаты в локальной СК |
Обозначение |
|
|
|
|
|
1 |
Перемещение центра масс базового шасси вдоль оси X0 |
q1 |
|
2 |
Перемещение центра масс базового шасси вдоль оси Y0 |
q2 |
|
3 |
Перемещение центра масс базового шасси вдоль оси Z0 |
q3 |
|
4 |
Поворот базового шасси вокруг оси X1 |
q4 |
|
5 |
Поворот базового шасси вокруг оси Y1 |
q5 |
|
6 |
Поворот базового шасси вокруг оси Z1 |
q6 |
|
7 |
Поворот платформы вокруг оси Y2 |
q7 |
|
8 |
Поворот стрелы вокруг оси Z3 |
q8 |
|
9 |
Выдвижение телескопического звена вдоль оси X4 |
q9 |
|
10 |
Перемещение центра масс груза вдоль оси Y5 |
q10 |
|
11 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси X5 |
q11 |
12 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси Y5 |
q12 |
13 |
Поворот системы координат O5X5Y5Z5 |
вокруг оси Z5 |
q13 |
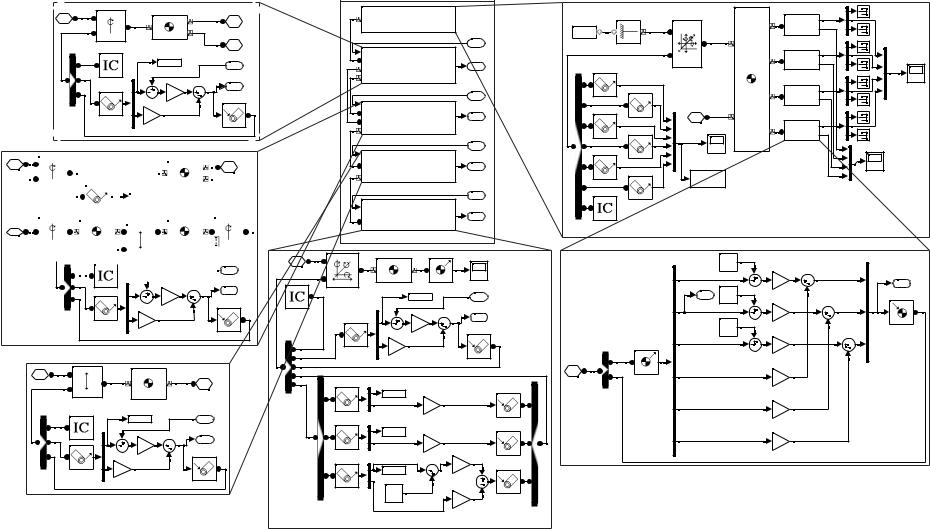
Гидропривод является важной подсистемой сложной динамической системы СГК. Подсистема гидропривод рассматривается как совокупность соединенных между собой элементов: трубопровод; гидравлический мотор; гидравлический насос; местное сопротивление (дроссель); гидроцилиндр; клапаны (предохранительный, обратный). Для каждого из элементов, входящих в гидропривод, составлена своя математическая модель, представляющая собой дифференциальные уравнения. Уравнения, описывающие гидравлические элементы, реализуются в среде Simulink при помощи блоков из библиотек SimHydraulics, Simscape. Структурная схема подсистемы гидропривод СГК, включающая в себя модели гидроэлементов, представлена на рисунке 4.
9

|
|
|
|
|
Angle |
1 |
|
|
|
|
Position1 |
|
2 |
|
3 |
Position2 |
|
Position |
4 |
||||
f(x)=0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Out1 |
Механическая |
|
Механическая |
|
|
Out2 |
|
Out2 |
|
Механическая |
|
|
|
Out2 |
||
|
|
|
|
|
|
|
передача 1 |
|
передача |
2 |
|
|
|
передача 3 |
|
|
|
||||||
|
|
|
|
|
|
In1 |
|
|
In2 |
B1 |
|
In2 |
B |
|
|
In2 |
B1 |
||||||
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
5 |
|
|
|
|
|
|
6 |
|
|
|
|
7 |
|
|
8 |
Ц3 |
|
|
|
|
|
|
|
Torque |
|
|
S |
|
|
Force1 |
|
|
|
Force2 |
S |
|
Force |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
М1 |
|
|
C |
|
R |
|
|
|
|
М2 |
C |
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
|
|
|
|
A |
|
B |
|
||
Mc |
w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
A |
B |
|
|
|
|
|
|
|
|
A |
B |
|
|
|
|
||||
|
|
|
|
|
|
|
|
B |
Ц1 |
|
|
|
|
B |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
КОУ1 |
|
|
|
|
|
|
|
КОУ3 |
|
|
|
|
-K- |
|
|
|
|
|
|
|
|
A |
|
X |
|
|
|
|
B |
|
A |
X |
|
|
|
-K- |
|
|
|
A |
B |
|
B |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
КОУ2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
КО3 |
|
|
A |
КО4 |
B |
|
|
|
|
B |
A |
X |
|
B |
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
КП2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
PS |
PS |
|
|
|
|
|
|
|
|
|
|
|
|
|
КП3 |
|
|
|
|
|
|||
|
|
|
КО2 |
|
|
B |
КО5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
S |
C |
|
|
B |
A |
|
A |
B |
A |
|
|
|
|
A |
|
B |
A |
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|||
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
B |
|
|
|
|
S |
A |
|
|
S |
A |
|
|
|
S |
|
A |
|
S |
A |
|
|
|
|
|
|
|
T1 |
|
|
T1 |
|
|
|
T1 |
|
T1 |
|
|||||||
|
|
|
|
КП1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
P1 |
B |
|
|
P1 |
B |
|
|
|
P1 |
B |
|
P1 |
B |
|
||
|
Н |
|
A |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
T2 |
|
|
|
T2 |
|
|
|
|
T2 |
|
|
T2 |
|
|
||
|
|
|
|
|
|
|
|
T |
|
|
T |
|
|
|
T |
|
T |
|
|||||
|
|
P |
|
A |
B |
|
|
P |
|
|
P |
|
|
|
P |
|
|
P |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
|
|
|
КО1 |
|
|
|
II |
|
|
|
III |
|
|
|
|
|
V |
|
|
VI |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
P |
R |
|
|
|
PS S |
1 |
|
PS S |
|
|
2 |
|
PS S |
3 |
|
PS S |
|
4 |
||
|
|
|
|
|
|
|
In1 |
|
|
|
In2 |
|
|
|
In3 |
|
|
In4 |
|||||
|
|
|
|
Б |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 4 – Структурная схема подсистемы гидропривод стрелового |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
грузоподъемного крана в Simulink |
|
|
|
|
|
||||||||||
Двигатель внутреннего сгорания, оснащенный всережимным регулятором угловой скорости, описан известной системой уравнений:
|
J |
d |
д |
= M д ( д |
, z) M c ; |
|
|
|
|
||||
dt |
|
|
||||
|
|
|
|
|
|
|
M д ( д, z) = M д ( д ) M z kдz; |
|
|||||
|
|
|||||
|
dz = (a bz) д2 iр2 cпрz F; |
(1) |
||||
|
||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
0 z zmax , |
|
|
|||
|
|
|
||||
где J – приведенный к валу ДВС момент инерции вращающихся частей; ωд
– угловая скорость коленчатого вала; Mд – крутящий момент на валу; Mс – момент сил сопротивления; M’д(ωд) – характеристика ДВС, аппроксимируемая конечным набором точек; z – перемещение муфты регулятора; kд, a, b – постоянные настройки регулятора; cпр и F – жесткость и сила предварительного сжатия пружины; ν – коэффициент вязкого трения в регуляторе.
Часовой расход топлива (единица измерения: литр/час), определялся по формуле:
GTЛ = |
|
Nд ge |
, |
(2) |
|
|
|||
|
1000 T |
|
||
10 |
|
|
|
|