

Отработка закона управления спид рб с имитатором на стенде и анализ полученных результатов
Перед тем, как загрузить НЗУ на УВМ и проводить отработку, необходимо провести трансляцию ЗУ средствами САПР ЗУ [9]. Трансляцией называется проверка корректности ЗУ (аналогом трансляции является компиляция программ, написанных на языках высокого уровня). Перед проведением трансляции необходимо:
Определить РМО (рабочие места операторов), т.е. определить рабочее место для конкретного оператора, как показано на рис. 10.1;

Рис. 10.1. Модуль «Рабочие места операторов».
Определить список операторов, т.е. определить экраны, которые будут доступны каждому оператору, а также команды, которые операторы могут выполнять. Для отработки достаточно 1 оператора. Модуль «Описание операторов» показан на рис. 10.2;
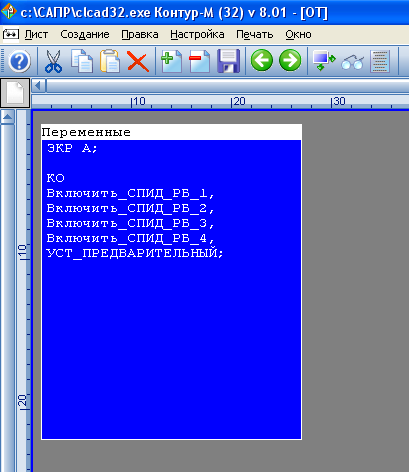
Рис. 10.2. Модуль «Описание операторов».
Определить описание системы управления, т.е. определить конфигурацию аппаратных средств системы управления. Для отработки было взято штатное описание системы КАУ РБ. Графическое представление описания системы управления показано на рис. 10.3;
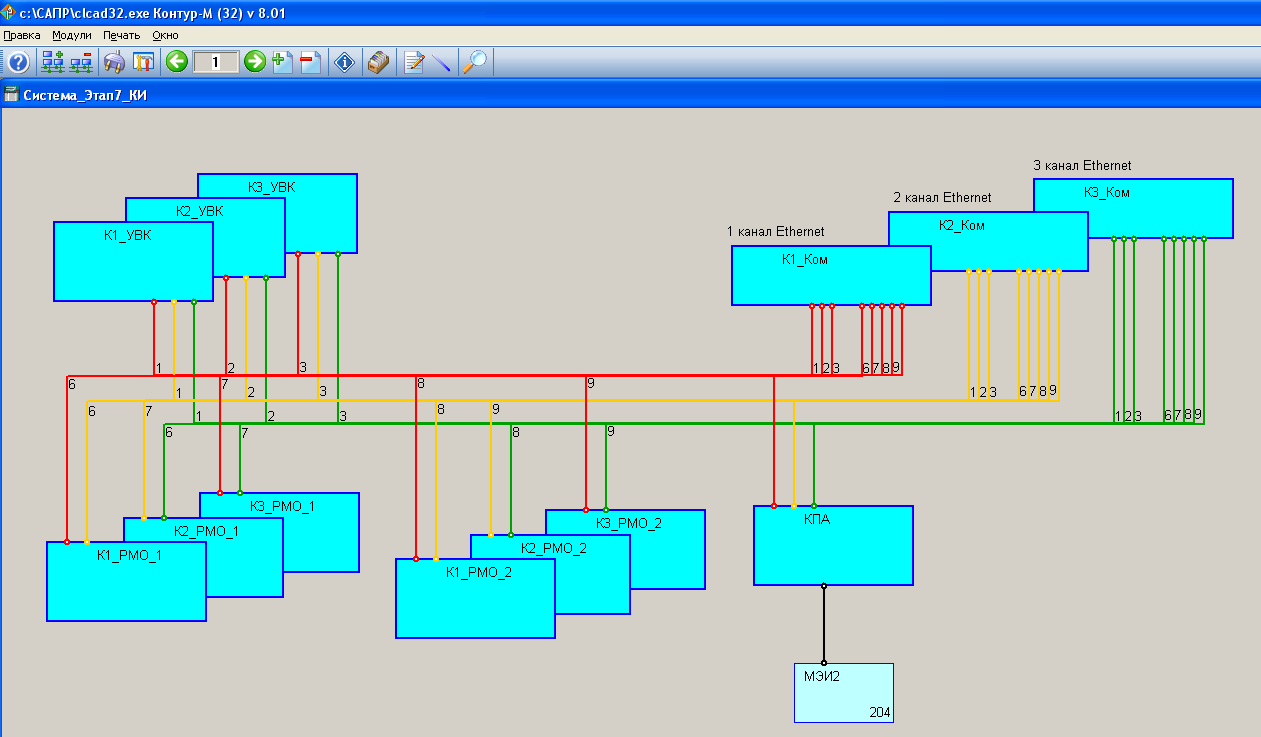
Рис. 10.3. Модуль «Рабочие места операторов».
После того, как все эти операции проделаны, можно переходить к трансляции. Была проведена трансляция закона управления вместе с имитатором и получен НЗУ. Протокол компоновки НЗУ показан на рис. 10.4.
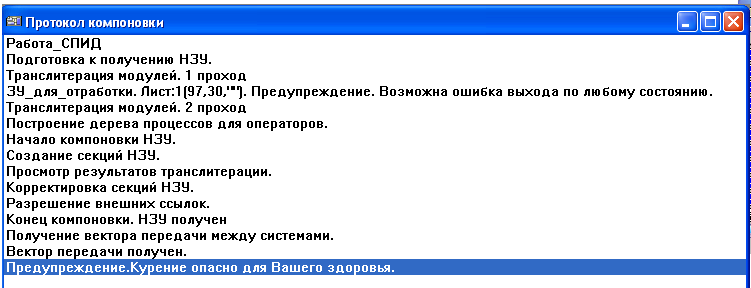
Рис. 10.4. Протокол компоновки НЗУ.
НЗУ записывается на носитель (диск CD-RW) и загружается на жёсткий диск УВМ. Дальнейшая обработка и реализация ЗУ ведётся с помощью СР ЗУ, которые включают в себя:
Программу начального включения и диагностики («ТЕСТИК»), которая осуществляет тестирование аппаратных и информационных средств ( *.exe и НЗУ), запуск СР ЗУ в одном из следующих режимов (реализация, восстановление, продолжение реализации ЗУ);
Программу идентификации оборудования («SETNAME»);
Программу инициализации, загрузки и проверки ПО и НЗУ на МРМО КАУ РБ («LOADER»);
Программу перевода МРМО КАУ РБ в защищённый режим («PROTECT»);
Программу системы реализации ЗУ («Control.exe»);
После того, как НЗУ был загружен в систему управления, начался процесс отработки. Имитатор, в соответствие с граф-моделью, работал параллельно ЗУ. Для запуска каждого из режимов выдавались команды:
«Включить_СПИД_РБ_1»;
«Включить_СПИД_РБ_2»;
«Включить_СПИД_РБ_3»;
«Включить_СПИД_РБ_4».
Переход в режим выдачи команд оператором осуществлялся нажатием клавиши «К» на клавиатуре. Для отображения текущего протокола работы системы управления использовалась клавиша «П».
После того, как все режимы работы СПИД РБ были проверены, отработка была остановлена и с помощью программы сохранения протокола работы был сохранён протокол на жёсткий диск.
Данный протокол был загружен в программу обработки протоколов «Start» и построены графики зависимости показаний датчика давления ДБО от времени (рис. 10.5).
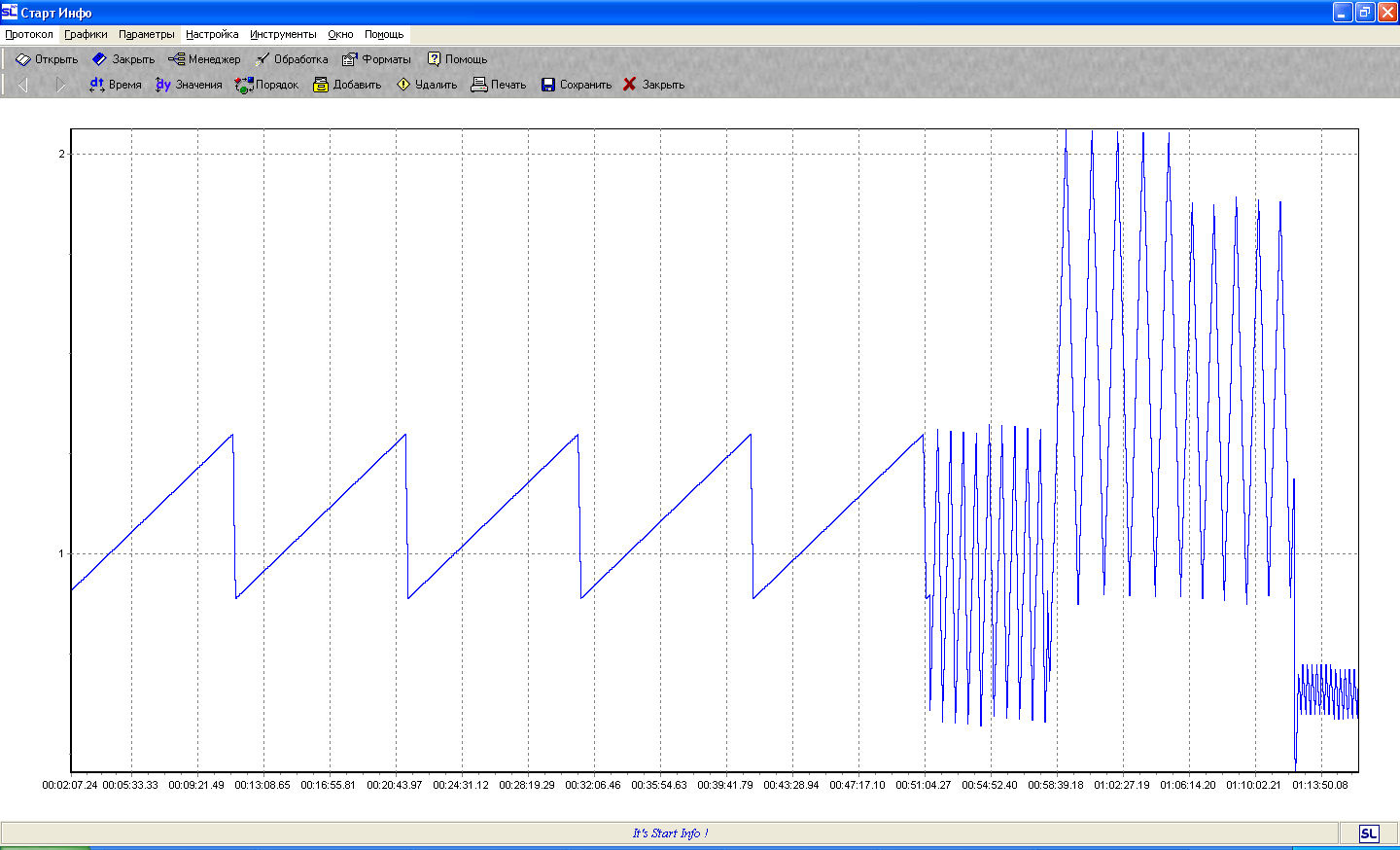
Рис. 10.5. Построение графика показаний ДБО от времени в программе обработки протокола «Start».
При ручном управлении имеются отклонения величины регулируемого давления от требуемых пределов (в каждом режиме разные). При автоматическом регулировании также были получены отклонения. График изменения отклонений давления от требуемой величины в «сухом» режиме работы СПИД РБ приведён на рис. 10.6.
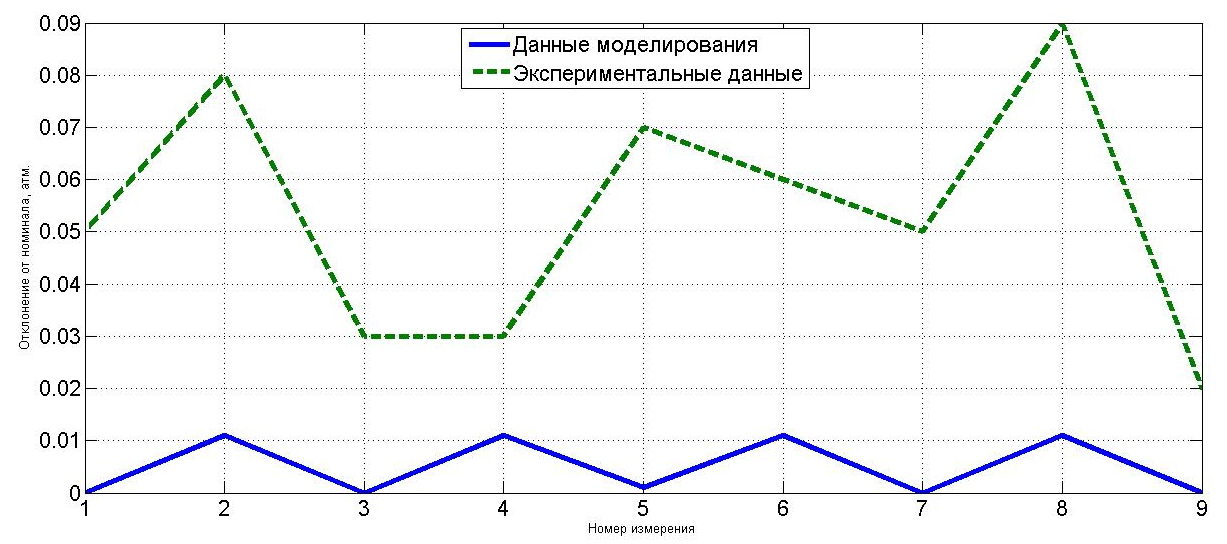
Рис. 10.6. Отклонение регулируемой величины от номинала в «сухом» режиме работы СПИД РБ.
График изменения отклонений давления от требуемой величины в режиме заправки бака приведён на рис. 10.7.
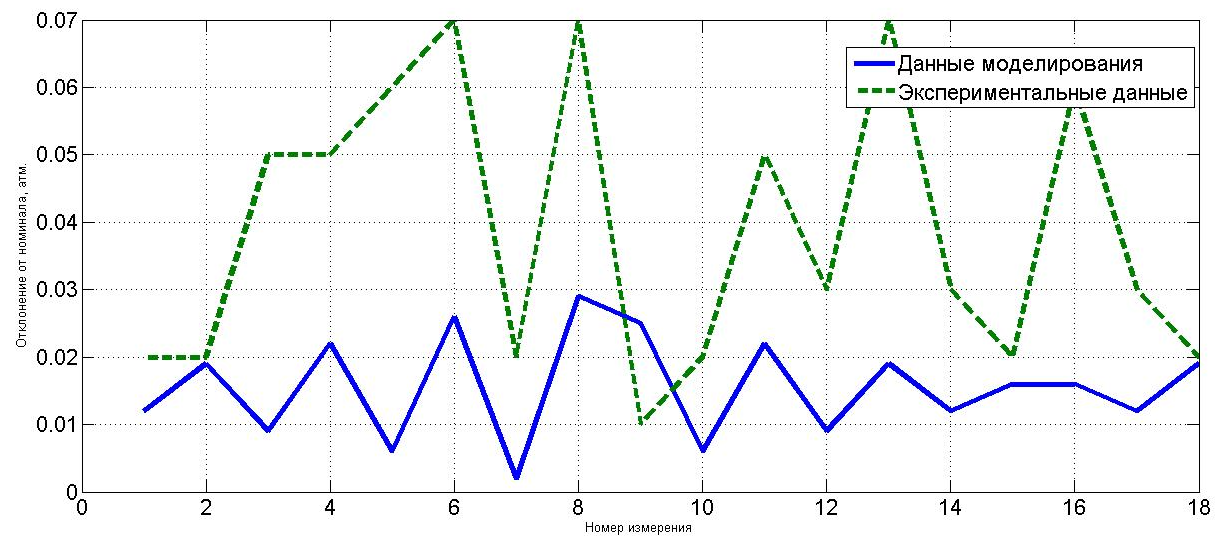
Рис. 10.7. Отклонение регулируемой величины от номинала в режиме заправки бака.
График изменения отклонений давления от требуемой величины в режиме сливе жидкого кислорода приведён на рис. 10.8.
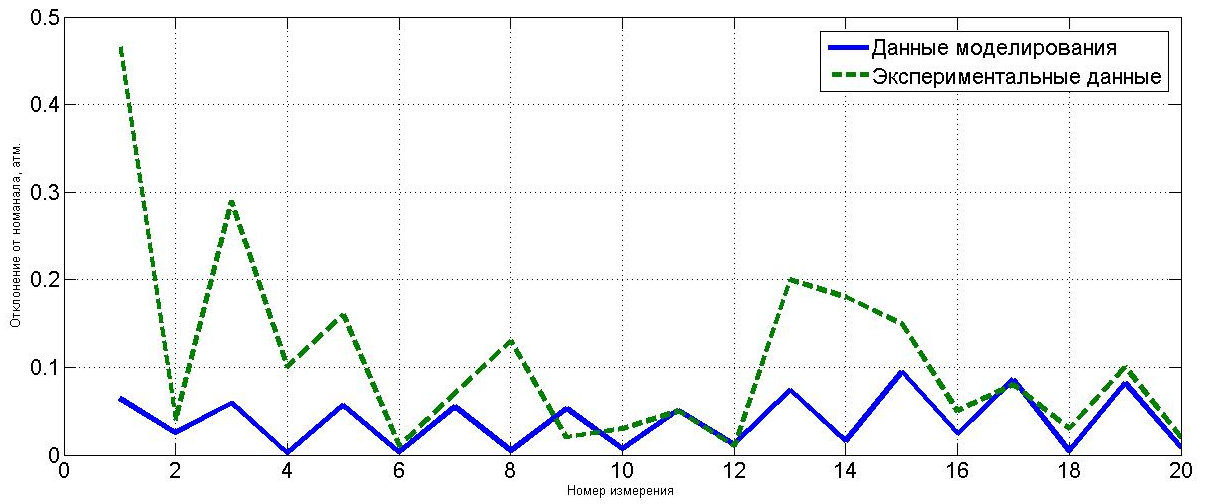
Рис. 10.8. Отклонение регулируемой величины от номинала в режиме слива жидкого кислорода.
График изменения отклонений давления от требуемой величины в режиме наддува наземных магистралей приведён на рис. 10.9.
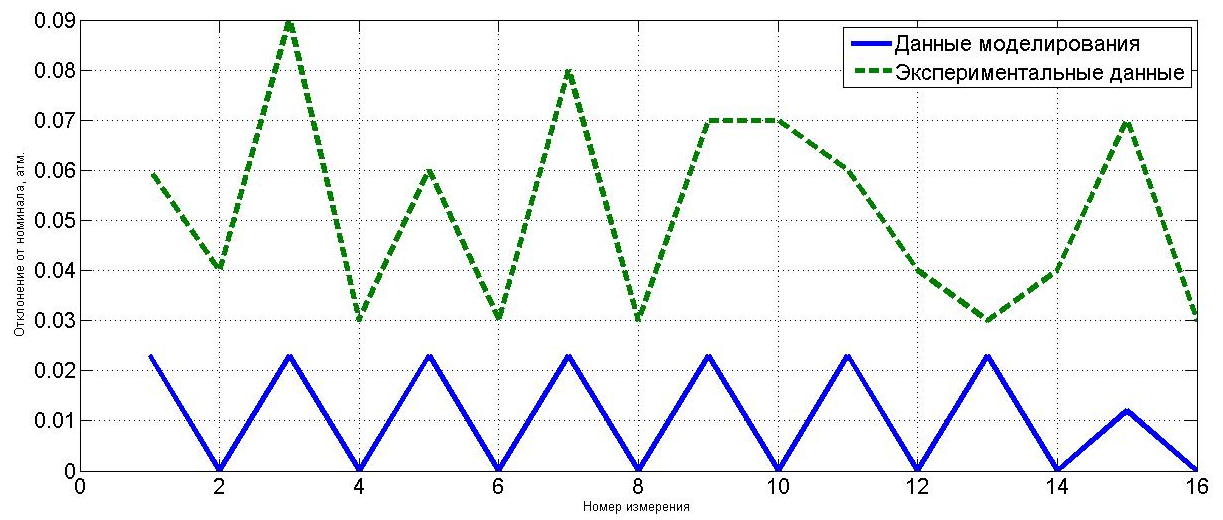
Рис. 10.9. Отклонение регулируемой величины от номинала в режиме наддува наземных магистралей.
Анализ полученных результатов (изменения показаний ДБО) показал, что даже при максимальной скорости изменения давления в баке, закон управления способен поддерживать давление в требуемых пределах, в то же время, при случайном падении или повышении давления в законе управления предусмотрены действия по устранению данной ситуации. Максимальное отклонение давления в баке при автоматическом регулировании от требуемых пределов составило 3.4 %, что гораздо меньше, чем при ручном управлении: 19.2%.