

4. Определение кинематических характеристик точки в сложном движении.
4.1 Основные сведения из теории кинематики сложного движения точки.
Движение точки по отношению к двум системам отсчета, из которых одна неподвижна (условно), а другая перемещается по отношению к неподвижной. Такое движение точки называется сложным.
4.2 Задача К3 из (3).
Дано: Sr=OM(t)=5π(t2-3)см; φe=φ(t)=3t2-8tрад; R=20см; t=2с
Определить абсолютную скорость и абсолютное ускорение точки М в
Решение:
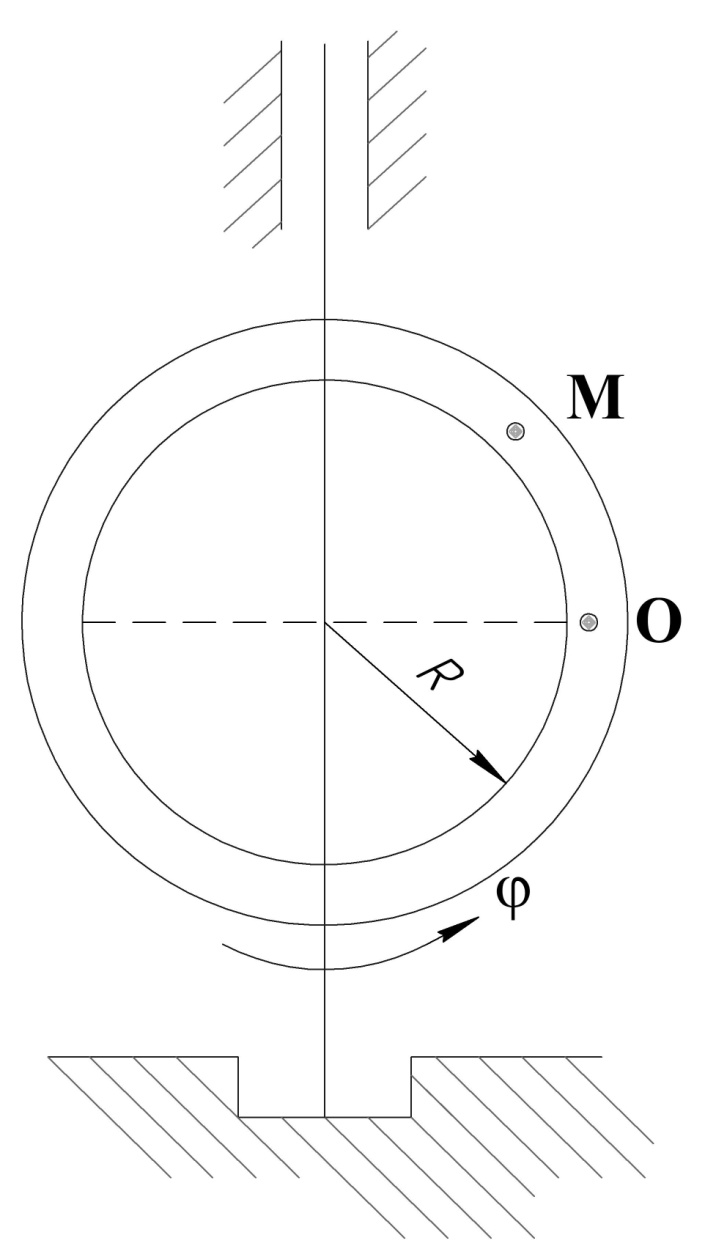
Точка М совершает сложное движение, состоящее из переносного вращения вместе с кольцом и относительного движения по кольцу.
При t=2c имеем S=5π(t2-3)=5π (м), найдем центральный угол
Согласно теореме о сложении скоростей абсолютная скорость точки М равна векторной сумме относительной и переносной скоростей: V̅=V̅r+V̅e
Определяем V̅r и V̅e
Относительная скорость:

Вектор V̅r направлен по касательной к дуге.
Переносная скорость: V̅e=ωe·MO1; MO1=Rcos α=20·0,707=14,1м
где

V̅e=4·14,1=56,6м/с вектор V̅e направлен перпендикулярно МО1 параллельно оси Х. Так как вектора V̅r и V̅e взаимно перпендикулярны, то

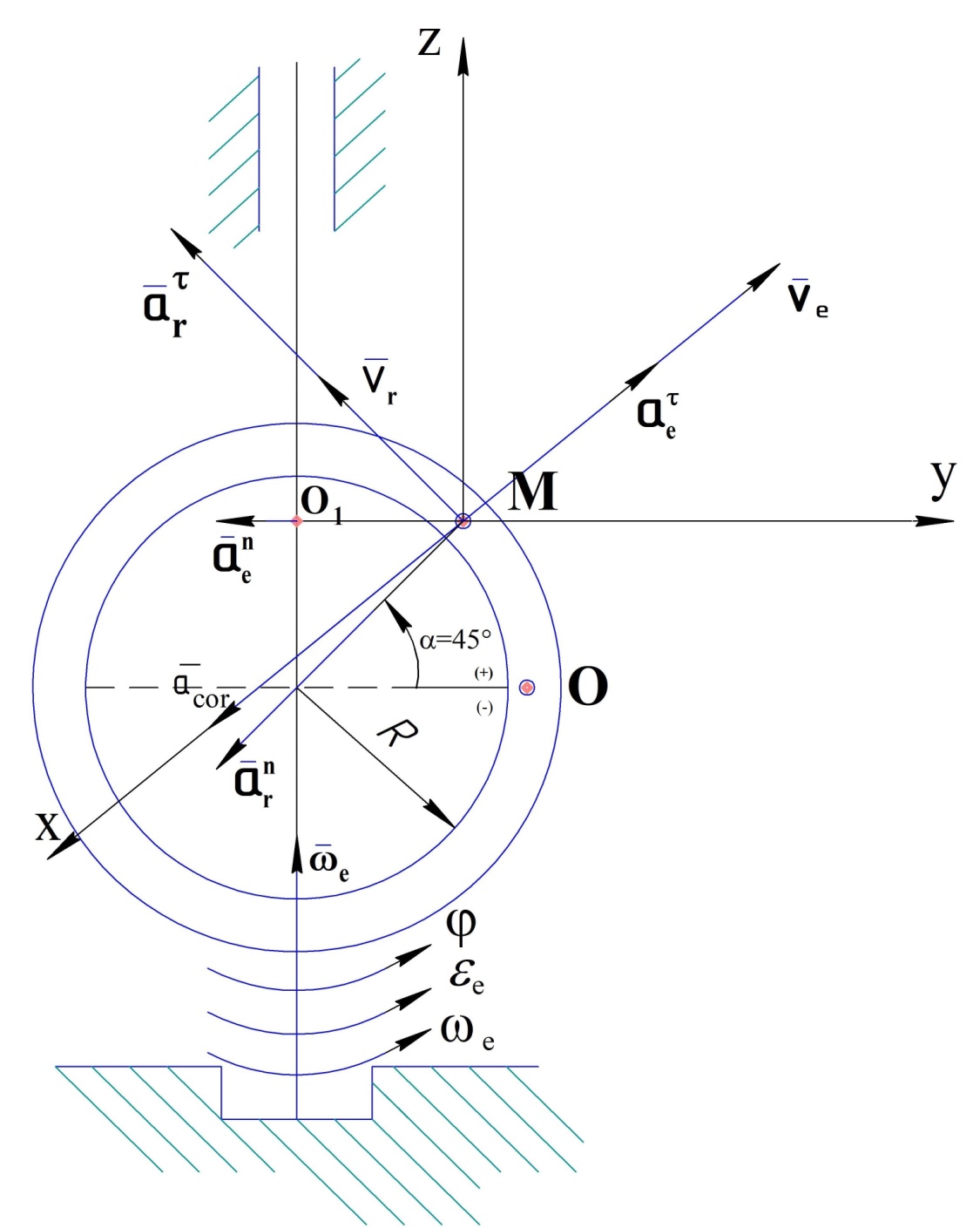
Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений: а̅а=а̅r+a̅e+a̅cor
или в развернутом виде: а̅а=a̅rτ+ a̅rn+ a̅eτ+ a̅en a̅cor
Модуль относительного касательного ускорения:
arτ
=

Положительный знак у arτ показывает, что вектор ускорения arτ направлен в сторону положительных значений Sr.
Относительное нормальное ускорение:
Модуль переносного вращательного ускорения:

где εe – модуль углового ускорения кольца.

Вектор a̅eτ направлен перпендикулярно OM, параллельно оси Х.
Переносное центростремительное ускорение:
aеn=ωe2·MO1=42·14,1=225,6м/с2 а̅еn параллельно MO1
У скорение Кориолиса: а̅cor=2ω̅e·V̅r,
модуль acor=2ωeVr sin45˚=2·4·62,8·0,707=355,2м/с2
Направление определяем по правилу векторного произведения.
Проецируем на оси координат:
ax=acor-aeτ =335,2-84,6=270,6м/с2
ay= -aen-arn cos45˚-arτ cos45˚=-225,6-(197,2·0,707)-(31,4·0,707)=-387,2м/с2
az= -arn sin45˚+arτ sin45˚=-197,2·0,707+31,4·0,707=-117,2м/с2
aa=

5. Исследование динамики поступательного и вращательного движения тел.
5.1 Основные сведения из теории: теоремы о движении центра масс и об изменении кинетического момента механической системы.
Теорема о движении центра масс звучит следующим образом: центр масс механической системы движется как материальная точка с массой равной массе всей системы, к которой приложены все внешние силы, действующие на систему.
Используя вышеописанные уравнения можно определять движение центра масс системы, не определяя движения отдельных ее точек.
Если в качестве механической системы рассматривать твердое тело, то полученные выражения будут являться дифференциальными уравнениями поступательного движения данного тела. Поэтому поступательно движущееся тело можно рассматривать как материальную точку с массой, равной массе всего тела.
5.2. Задача Д 3 из (3).
Дано:
 кг,
кг,
 кг,
кг,
 кг,
кг,
 см
см м,
м,
 см
см м,
м,
 см
см м,
м,
 см
см м,
м,
 Нм,
Нм,
 Нм,
Нм,
 с-1,
с-1,
 с
с
Найти:
 ,
,
 ,
,

Решение:
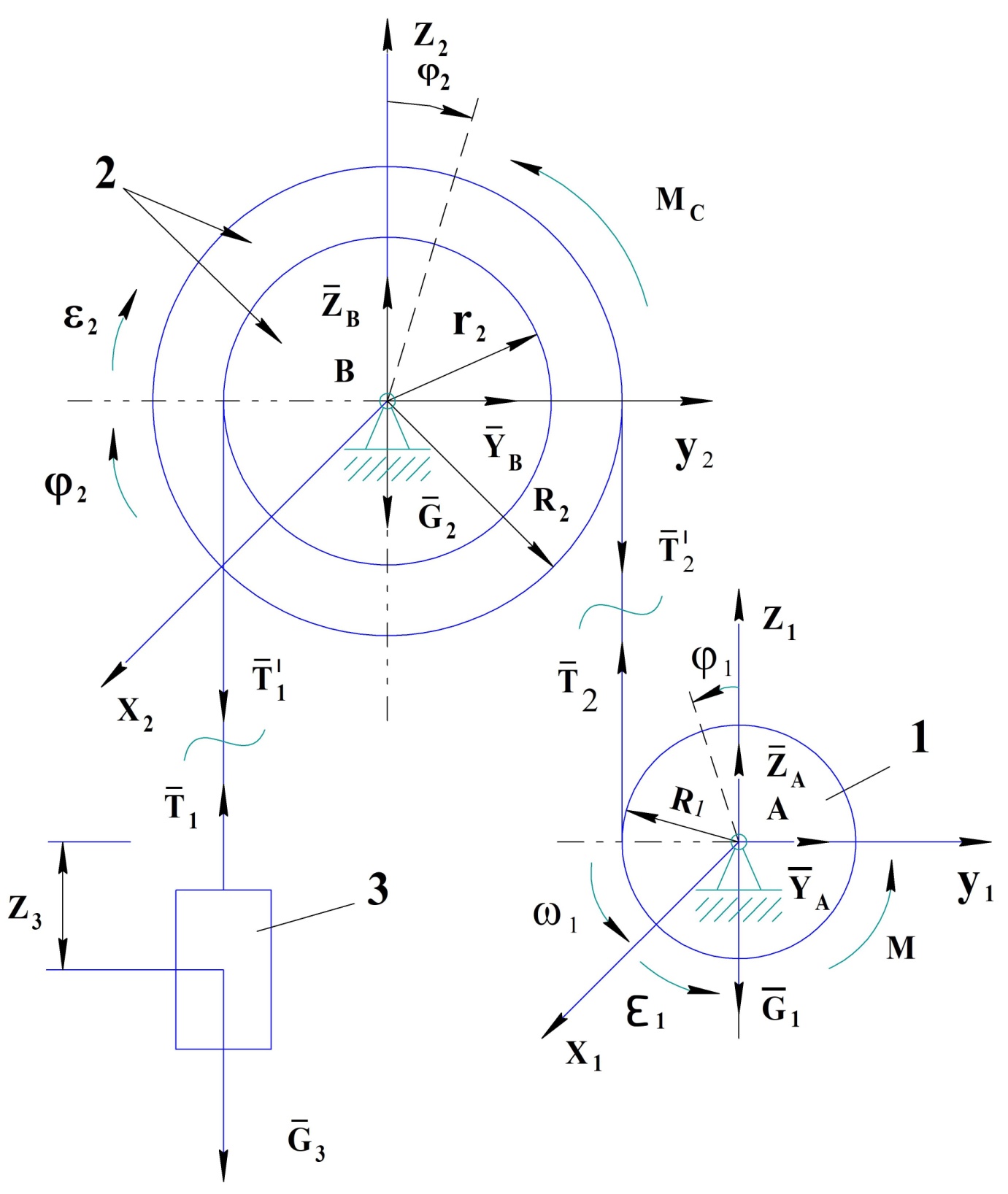
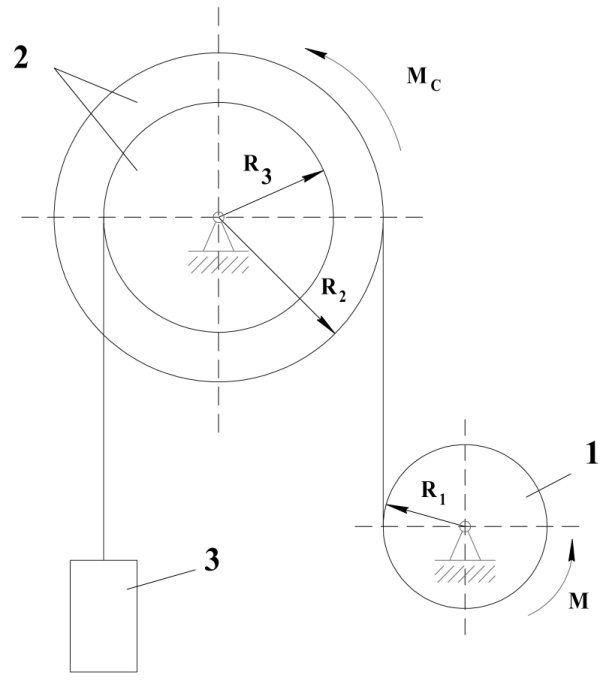
В данной ме ханической системе колеса 1 и 2 механизма вращаются вокруг неподвижных осей, а поднимаемый груз 3 совершает поступательное движение.
Напишем дифференциальные уравнения движения каждого из этих трех тел, для чего отделим их друг от друга, разрезав соединительные нити.
На
колесо 1 механизма действуют сила тяжести
 ,
движущий момент М, составляющие реакции
опоры (
,
движущий момент М, составляющие реакции
опоры ( и
и
 ),
сила натяжения нити
),
сила натяжения нити
 .
.
На
колесо 2 действуют сила тяжести
 ,
составляющие реакции опоры (
,
составляющие реакции опоры ( и
и
 ),
силы натяжения нитей (
),
силы натяжения нитей ( и
и
 ),
момент сопротивления МС.
),
момент сопротивления МС.
На
груз 3 действуют сила тяжести
 ,
сила натяжения нити
,
сила натяжения нити
 .
.
Очевидно,
что
 и
и
 .
.
Составим дифференциальное уравнение вращения колеса 1 вокруг оси х1:
 (1)
(1)
Составим дифференциальное уравнение вращения колеса 2 вокруг оси х2:
 (2)
(2)
Составим дифференциальное уравнение поступательного движения груза 3:
 (3)
(3)
Колеса
1 и 2 связаны нитью, значит

Отсюда
 ,
а значит
,
а значит

Скорость груза 3:
 ,
а значит
,
а значит
Моменты инерции колес 1 и 2:
 кг·м2
кг·м2
 кг·м2
кг·м2
Из уравнения (3):
 (4)
(4)
Из
уравнения (2), с учетом того, что
 и
и
 :
:
 (5)
(5)
Подставим известные в уравнение (1):




Дважды интегрируем:


Используем
начальные условия: при

 и
и
 рад/с
рад/с
Тогда
 рад/с
рад/с

Уравнение угловой скорости колеса 1 принимает вид:
 (рад/с)
(рад/с)
Уравнение вращательного движения колеса 1 принимает вид:
 (рад)
(рад)
Для момента с:
 (рад/с2)
(рад/с2)
Натяжения нитей определим из выражений (4) и (5):
 (Н)
(Н)
 (Н)
(Н)
Ответ:
(рад),
 Н,
Н,
 Н
Н