

3. Определение кинематических характеристик тел их точек в случаях плоского движения тел.
3.1 Основные сведения из кинематики поступательного, вращательного и плоского движения тел.
Поступательное движение- это такое движение тела, при котором любая прямая, проведенная через точки тела, перемещается параллельно самой себе. При поступательном движении все точки тела перемещаются по одинаковым траекториям и имеют в каждый момент времени равные (по ве-личине и направлению) скорости и ускорения.
Вращение твердого тела вокруг неподвижной оси – это движение, при котором все точки тела движутся по окружностям, плоскости которых перпендикулярны неподвижной оси вращения, а центры лежат на этой оси.
Плоское движение абсолютно твердого тела – это движение, при котором все точки тела движутся в плоскостях, параллельных некоторой неподвижной плоскости.
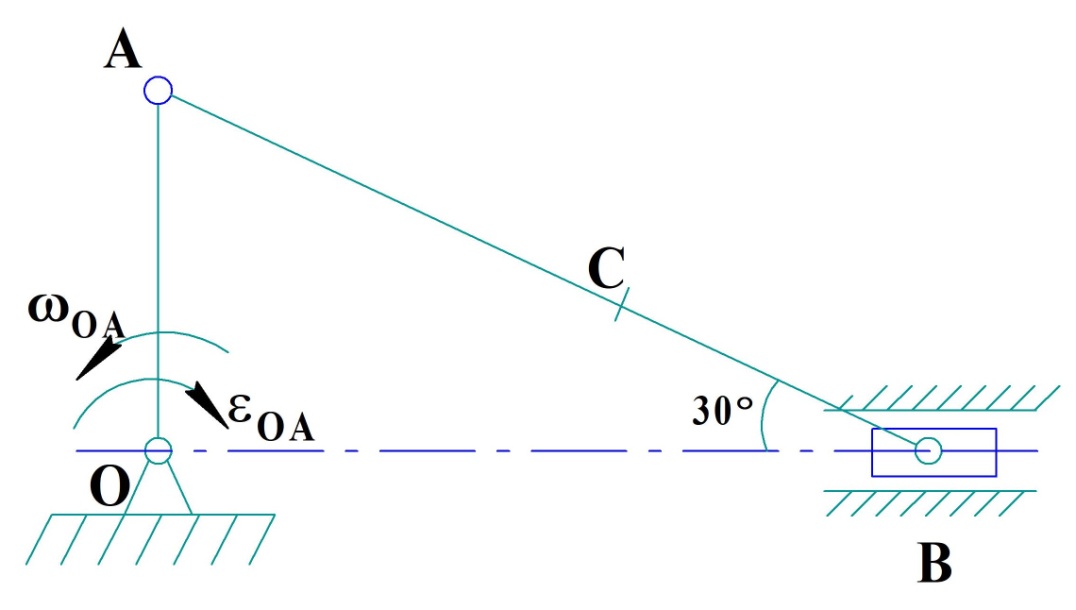
3.2 Задача К2 из (3).
Дано:
ОА=35 см, АС=45 см,
 4
рад/с,
4
рад/с,
 8
рад/с2
8
рад/с2
Найти: скорости и ускорения точек В и С, угловую скорость и угловое ускорение звена АВ.
Решение:
1) Определение скоростей точек В и С и угловой скорости звена АВ.

Вычислим модуль скорости пальца А кривошипа ОА при заданном положении механизма
 =
= =140
(см/с)
=140
(см/с)
Вектор скорости т.А перпендикулярен ОА, направлен в сторону вращения механизма.
Мгновенный центр скоростей находится в «бесконечности» и звено АВ находится в данный момент в мгновенном поступательном движении
( ),
следовательно, скорости всех его точек
одинаковы:
),
следовательно, скорости всех его точек
одинаковы:
 и
и  см/с.
см/с.
2) Определение ускорений точек В и С и звена АВ.

Ускорение т.А складывается из вращательного и центростремительного
 ;
;
Находим:

 (см/с)
(см/с)

 (см/с)
(см/с)
Согласно теореме об ускорениях точек плоской фигуры
 или
или 
Центростремительное ускорение т В во вращательном движении шатуна АВ вокруг полюса А:
 ,
так как
.
,
так как
.
Вектор
 направлен от А к О.
направлен от А к О.
Вектор
 перпендикулярен вектору
и направлен противоположно
перпендикулярен вектору
и направлен противоположно
 (вращение кривошипа ОА – замедленное).
(вращение кривошипа ОА – замедленное).
Для
ускорения
 т.В и вращательного ускорения
т.В и вращательного ускорения
 шатуна известны только линии их действия:
- по горизонталь вдоль направляющих
ползуна,
- перпендикулярно АВ. Зададимся произвольно
их направлениями по указанным линиям.
шатуна известны только линии их действия:
- по горизонталь вдоль направляющих
ползуна,
- перпендикулярно АВ. Зададимся произвольно
их направлениями по указанным линиям.
Проекции векторного равенства на оси координат:
 ,
,
 .
.
Отсюда получаем
 (см/с2),
(см/с2),
Ускорения и положительны, т.е их истинные направления соответствуют принятым.
Угловое
ускорение шатуна АВ определяется по
формуле:
 .
.
Вначале определим длину шатуна АВ:
 (см)
(см)
Тогда
 (рад/с2)
(рад/с2)
Ускорение т.С определяем аналогично, как и для т.В:


Вращательное и центростремительное ускорения т.С во вращательном движении АВ вокруг полюса А

 (см/с2)
(см/с2)

Вектор
 направлен в соответствии с угловым
ускорением
направлен в соответствии с угловым
ускорением
 перпендикулярно АС.
перпендикулярно АС.
Ускорение т.С находим способом проекций, используя те же направления осей координат, что и для т.В:
 =280·0,866+560·0,5
=280·0,866+560·0,5 см/с2
см/с2
 =415,7+280·0,5-560·0,866
=415,7+280·0,5-560·0,866 см/с2
см/с2

