

Базис «и-не»:
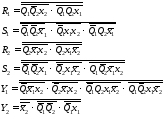 ;
(4)
;
(4)
Совпадений элементов не имеется.
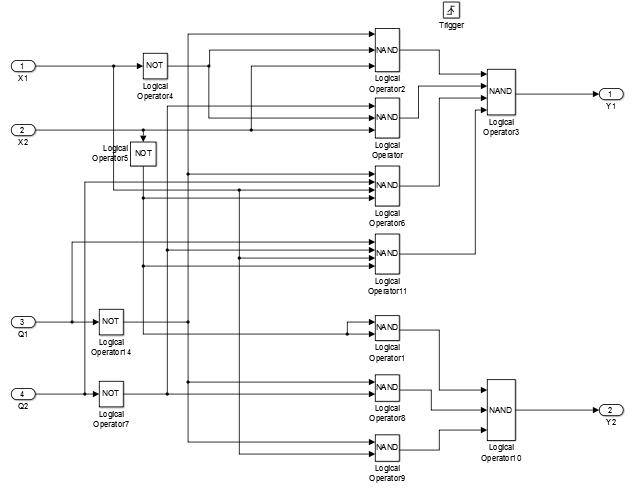
Структурная схема:
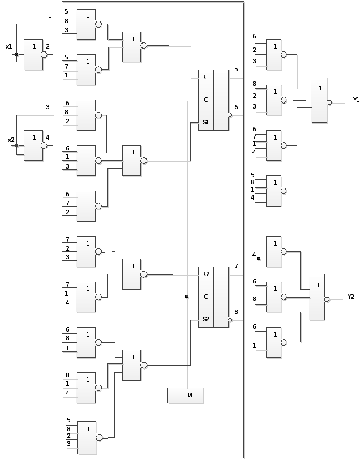
Рис.10
Подбор микросхем
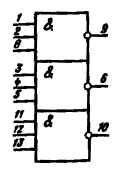
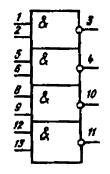
Для реализации данного автомата понадобится 2 RS- триггера, 4 элемента 4И-НЕ, 14 элементов 3И-НЕ, 7 элементов 2И-НЕ.
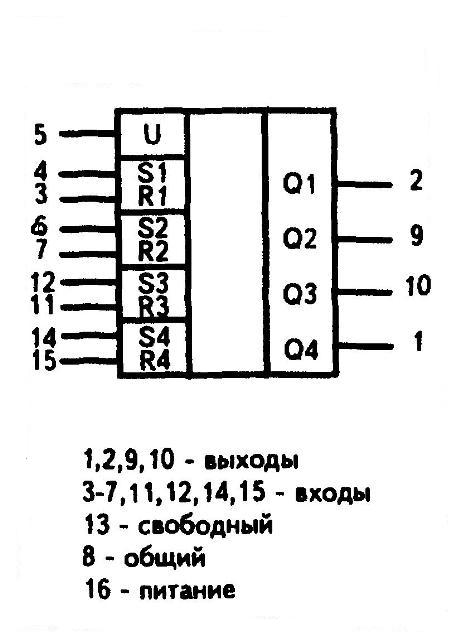
Воспользуемся микросхемами, представляющими собой сборки из нескольких однотипных элементов:
К561ТР2 – четыре RS-триггера;
Напряжение питания. 3...15 В
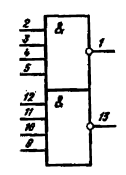
К561ЛА8 – 2 элемента 4И-НЕ;
Напряжение питания: 3..15V
К561ЛА9 – 5 элементов 3И-НЕ;
Напряжение питания: 3..15V
К561ЛА7 - 2 элемента 2И-НЕ.
Напряжение питания: 3..15V
Таким образом, нам понадобятся:
- 1 микросхема К561ТР2;
- 2 микросхемы К561ЛА8;
- 5 микросхем К561ЛА9;
- 2 микросхемы К561ЛА7.
Незадействованные входы заземлим.
|
Моделирование в Simulink
|
|
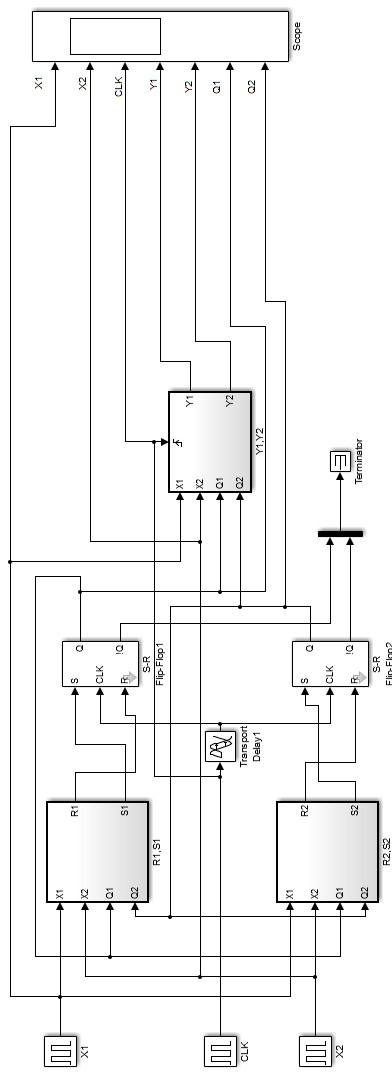
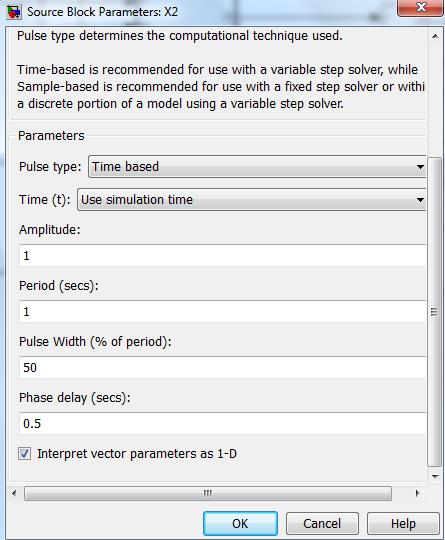
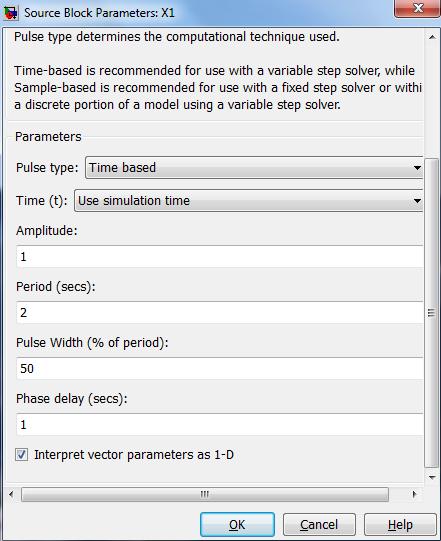
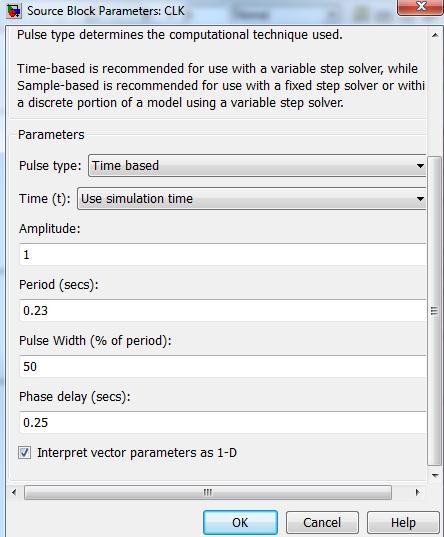
Для реализации автомата составим систему с использование подсистем для формировании сигналов R1, S1, R2, S2, Y1, Y2. Блоки подсистем возьмем из библиотеки: Simulink Ports&Subsystems Subsystem(Triggered Subsystem). RS-триггеры возьмем из библиотеки: Simulink Extras Flip Flops S-R Flip-Flop. Для RS-триггеров и подсистемы Y1, Y2 установим срабатывание по положительному фронту. Неиспользуемые выходы подключим к Terminator (Simulink Sinks Terminator). Для снятия сигналов используем осциллографы: Simulink Sinks Scope. Настроив их параметры для удобного анализа процессов. Для подачи сигналов X1, X2, CLK используем Pulse Generator: Simulink Sources Pulse Generator. Задав параметры для каждого сигнала отдельно:
На входа RS- триггеров установим элемент задержки, для правильного их переключения. Выберем элемент задержки Simulink ContiniousTransport Delay. Обеспечивает задержку входного сигнала на заданное время.
Зададим настройки:

Time Delay — время задержки сигнала (не отрицательное значение);
Initial input — начальное значение выходного сигнала;
Buffer size — размер памяти, выделяемой для хранения задержанного сигнала. Задается в байтах числом, кратным 8 (по умолчанию 1024);
Элемент запаздывания мы ставим для того чтобы учитывать предыдущие значения Q1 и Q2 .
Рассмотрим подробнее используемые подсистемы:
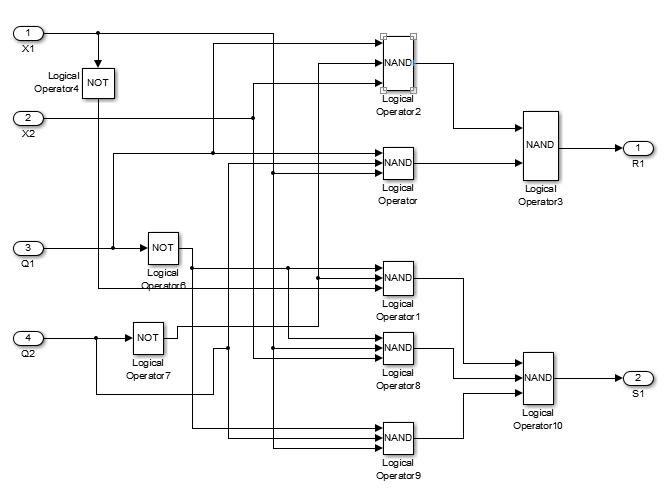
Подсистемы реализуют минимизированные логические функции для сигналов R1, S1, R2, S2, Y1, Y2. Для этого применяются логические элементы ИЛИ-НЕ: Fixed-Point Blockset Logic&Comparison Examples NAND. Для всех логических элементов определим тип выходных данных Boolean.
Подсистема R1, S1:
Подсистема R2, S2:
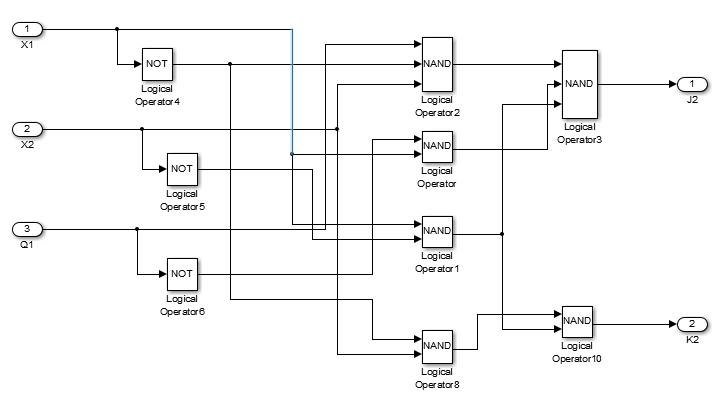
Подсистема Y1, Y2:
Вследствие того, что выходной сигнал должен зависеть от синхросигнала, то в подсистему Y1, Y2 введен триггер (по фронту). Для этого откроем правой кнопкой мыши вкладку и выберем меню Look Under Mask:
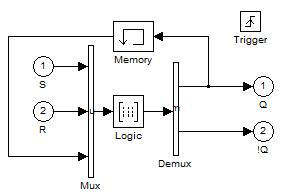
Переключение автомата происходит по фронту.
Временные диаграммы работы автомата:
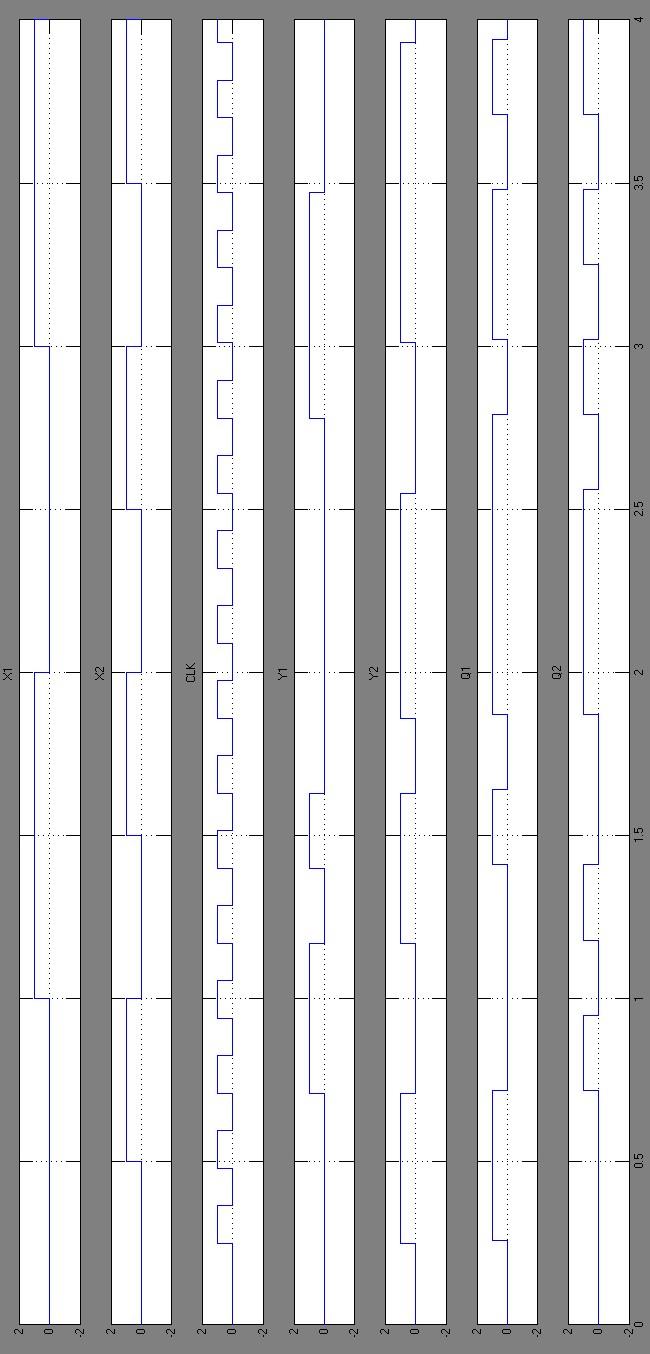
Рис. 11
Поясним работу автомата по (Рис. 11):
|
Такт |
Начальное состояние |
Входное воздействие |
Следующее состояние |
Выходное состояние | ||||
|
1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
2 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
|
3 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
|
4 |
0 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
|
5 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
|
6 |
0 |
1 |
1 |
0 |
1 |
0 |
1 |
1 |
|
7 |
1 |
0 |
1 |
1 |
0 |
0 |
0 |
0 |
|
8 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
1 |
|
9 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
|
10 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |