

1. Используя теорему об изменении кинетической энергии, найдите скорость первого груза тот в момент времени, когда пройденный им путь будет равным .
Решение. Воспользуемся теоремой об
изменении кинетической энергии. Так
как в начальный момент времени механическая
система находилась в покое,
![]() .
По условию задания нити, соединяющие
тела механической системы предполагаются
нерастяжимыми, проскальзывание между
телами отсутствует, поэтому
.
По условию задания нити, соединяющие
тела механической системы предполагаются
нерастяжимыми, проскальзывание между
телами отсутствует, поэтому
![]() .
Тогда из теоремы следует:
.
Тогда из теоремы следует:
![]()
 .
.
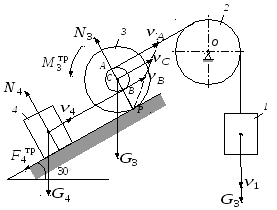
Рис. 15
Вычислим T – кинетическую энергию системы. Груз 1 совершает поступательное движение, значит:
![]() .
.
Блок 2 вращается вокруг неподвижной оси, поэтому
![]() .
.
Момент инерции блока 2:
![]() ,
а его угловая скорость
,
а его угловая скорость
![]() .
Таким образом, кинетическая энергия
блока 2 принимает
.
Таким образом, кинетическая энергия
блока 2 принимает
вид
![]() .
.
Так как каток 3 совершает плоское движение:
![]() .
.
Поскольку нити предполагаются
нерастяжимыми,
![]() .
Точка P является
мгновенным центром скоростей третьего
тела, значит:
.
Точка P является
мгновенным центром скоростей третьего
тела, значит:
![]() .
.
Откуда следует:
![]() .
.
Момент инерции катка 3 определим по
заданному радиусу инерции
![]() :
:
![]() .
.
Подставляя
![]() и
и
![]() в выражение
в выражение
![]() ,
получим
,
получим
![]() .
.
Кинетическая энергия груза 4:
![]() .
.
Так как нити предполагаются нерастяжимыми,
![]() .
Анализируя движение третьего тела,
выразим
.
Анализируя движение третьего тела,
выразим
![]() :
:
![]() .
.
Тогда
![]() .
.
Складывая теперь кинетические энергии тел механической системы, найдем
![]() .
.
Вычислим сумму работ приложенных к системе внешних сил:
![]() :
:
Работа силы тяжести груза 1:
![]() .
.
Аналогично определяется работа силы тяжести катка:
![]() .
.
Путь, пройденный точкой С, можно
определить из равенства
![]() ,
представив его в виде
,
представив его в виде
![]() .
Умножая последнее соотношение на dt
и интегрируя, получим
.
Умножая последнее соотношение на dt
и интегрируя, получим
![]() .
Тогда
.
Тогда
![]() .
.
Аналогичным образом из
![]() несложно получить
несложно получить
![]() .
.
Найдем работу сил трения качения катка 3.
![]() .
.
Поэтому
![]() .
.
Работа силы тяжести груза 4:
![]() ,
где
,
где
![]() находится из выражения
находится из выражения
![]() через
через
![]() путем интегрирования:
путем интегрирования:
![]() .
.
![]() .
.
Последнее слагаемое – работу сил трения скольжения груза 4
![]()
определим по формуле
![]() .
.
Тогда сумма работ внешних сил равна:
![]() .
.
Приравнивая выражение кинетической энергии механической системы к сумме работ внешних сил, получим равенство, из которого следует
 м/с.
м/с.
2. Применяя общее уравнение динамики, найдите: ускорения тел, движущихся поступательно; ускорения центров масс тел, совершающих плоское движение; угловые ускорения тел, совершающих вращательное и плоское движения.
Решение. В соответствии с общим уравнением динамики изобразим на рисунке активные силы и даламберовы силы инерции (рис. 16).
Так как груз 1 совершает поступательное движение, элементарные силы инерции всех его точек приводятся к равнодействующей, равной по модулю
![]() .
.
Линия действия вектора![]() проходит через центр масс этого тела.
Блок 2 вращается вокруг неподвижной
оси, поэтому силы инерции точек этого
тела приводятся к паре сил с моментом,
абсолютное значение которого
проходит через центр масс этого тела.
Блок 2 вращается вокруг неподвижной
оси, поэтому силы инерции точек этого
тела приводятся к паре сил с моментом,
абсолютное значение которого
![]() .
Момент инерции
.
Момент инерции
![]() был определен ранее (см. с. 45), а угловое
ускорение
был определен ранее (см. с. 45), а угловое
ускорение
![]() находится дифференцированием по времени
угловой скорости
находится дифференцированием по времени
угловой скорости
![]() :
:
![]() .
Тогда
.
Тогда
![]() .
.
Элементарные силы инерции катка 3
приводятся в его центре масс к силе,
модуль которой
![]() ,
и паре сил с моментом, равным по абсолютному
значению
,
и паре сил с моментом, равным по абсолютному
значению
![]() .
Момент инерции
.
Момент инерции
![]() найден ранее, а ускорение
найден ранее, а ускорение
![]() и угловое ускорение
и угловое ускорение
![]() определяются из выражений
определяются из выражений
![]() и
и
![]() дифференцированием их по времени:
дифференцированием их по времени:
![]() .
Отсюда
.
Отсюда
![]() ,
,
![]() .
.
Груз 4 движется поступательно, значит:
![]() ,
,
где
![]() находится из
находится из
![]() дифференцированием по времени.
дифференцированием по времени.
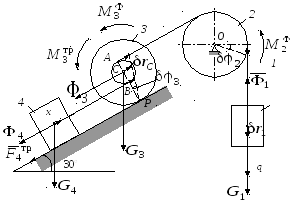
Рис. 16
Придадим центру масс груза 1
возможное перемещение
![]() .
Так как наложенные на механическую
систему связи являются стационарными,
неосвобождающими и голономными, значения
возможных перемещений других точек
системы выражаются через
.
Так как наложенные на механическую
систему связи являются стационарными,
неосвобождающими и голономными, значения
возможных перемещений других точек
системы выражаются через
![]() точно так же, как скорости этих точек
через
точно так же, как скорости этих точек
через
![]() :
:
![]() .
.
Составим общее уравнение динамики:
![]()
Подставляя сюда найденные ранее момент силы трения качения, силу трения скольжения, силы и моменты сил инерции, а также выражения возможных перемещений, получим:
![]() .
.
Откуда окончательно:
![]() м/с2.
м/с2.
Тогда
![]() м/с2;
м/с2;
![]() м/с2;
м/с2;
![]() с-2;
с-2;
![]() с-2.
с-2.