

СИСТЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ
.pdfR7
R8
С1
R6
UВХ |
|
|
|
КВХ |
С2 |
|
|
|
|
|
|
|
|
UВИХ |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
КВИХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
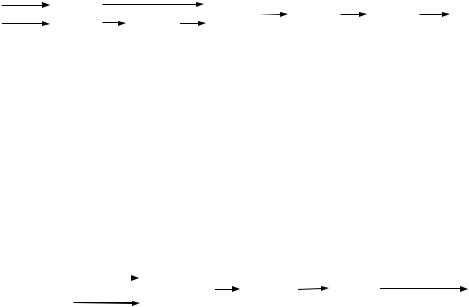
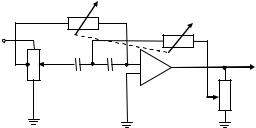
Рис. 14.14. Схема реалізації ПІД-закону в блоці Р.12.
Вхідний сигнал йде по двом паралельним ланцюгам.
С1 R8 |
R8 |
R7 |
R6 |
|
|
|
СЕКВ |
R12 |
R12 |
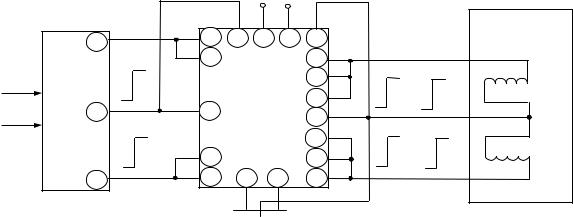
Рис. 14.15. Схеми перетворення вхідного сигналу.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) |
КВХ |
|
WВХ |
|
|
КВХ |
|
ZЗЗ |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КВИХ |
|
|
|
КВИХ |
ZВХ |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WЗЗ |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
R8 |
|
1 |
|
|
|
|
|
|
|
|
|
W (р) |
KВХ |
|
|
|
R8 |
|
KВХ |
p С |
|
R8 K |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЕКВ |
|||||||||||||||||||
W1 |
(р) |
1 |
|
|
|
|
|
|
p |
C1 |
|
|
|
|
|
|
2 |
|
|
|
|
КВИХ |
|
1 |
|
КВИХ |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p C1 |
|
|
||||||||||||||||||||
КВИХ |
|
|
R7 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
R8 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
р КВХ |
К ТІ КП р ТД , |
|
||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
KВИХ R7 |
p C1R8 |
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КВИХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
КП 1 |
|
|
|
, |
|
|
|
|
|
|
|
|
КП КВИХ |
|
, ТД |
|
КВХ К ТІ , |
|
|
||||||||||||||||||||||
|
|
ТI |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
C1 К СЕКВ |
|
|
|
|
|
|
|
||||||||||||||||||||
Т |
|
R8 C1, |
|
К |
|
|
1 |
|
|
|
|
R7 R8 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
I |
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
КВИХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
,якщо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
82
|
1 |
|
|
W(p) W1(р) W2(р) КП 1 |
ТД р |
||
ТІ р |
|||
|
|
Змінний резистор R8 є органом настроювання ТІ. Резистори R7 і R8
зроблені спареними для зменшення взаємного впливу параметрів настроювання. Орган настроювання КП – резистор R12 (КВИХ). Таким чином, КП
і ТІ не залежать одне від одного. Опір R6 (Квх) – орган настроювання ТД , за допомогою якого ТД задається як частка ТІ.
Для здійснення безударного переходу з «автоматичного» режиму роботи на «ручний» у Р.12 передбачені реле Р і джерело напруги E, що підключені через клеми 5, 6 до одного з контактів перемикача «Р - А» у БУ-12. Реле Р при переході на режим «Р» контактами 1Р, 2Р і 3Р переводить регулятор у режим
«гарячого резерву», тобто в систему, що стежить. Вона забезпечує відстеження вихідним струмом значення, яке встановлює оператор на J’Р. Для цього в БУ-12
є два спарених задавачі струмових сигналів J”Р та J’Р. При цьому вихідний струм йде через контакт 3Р по R13 – еквівалент навантаження. Контакт 2Р
відключає ФЗЗ, а 1Р подає J”Р на вхід системи, що стежить. Таким чином,
регулятор готовий до безударного переходу в режим «А». Зворотний перехід вимагає попередньо установити J’Р рівним поточному значенню струму навантаження, який зформований регулятором.
14.6. Блок динамічних перетворень Д.01
Принципова схема блоку диференціювання приведена на рис.13Д. Він може використовуватися для формування ПІД-закону регулювання разом з Р.21 (див. рис.14.16). Це реалізація третьої схеми формування ПІД-закону. Органи настроювання при цьому сильно взаємозалежні.
83
ХД1 |
И.04 |
|
|
|
Р.21 |
|
БУ.21 |
|
ВП |
|
ВМ |
ХД2 |
|
|
|
|
|
|
y′=const |
||||
|
|
Д.01 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 14.16. Схема включення диференціатора Д01.
У блоці Д.01 послідовно з'єднаний демпфер (аперіодична ланка) і реальна диференційна ланка.
W |
Д01 |
|
1 |
|
Т |
Д р |
К |
Д |
|
|
|
|
|
||||||
|
|
ТДМ р 1 ТД р 1 |
|
||||||
I |
1 |
|
|
|
TД p |
|
КД |
I=(0…5)мА |
||
U |
|
TДМ p+1 |
|
|
|
|
|
|
|
|
|
|
|
|
TД p+1 |
||||||
Рис. 14.17. Структура блоку Д01.
Клеми 14 і 15 – вхід по напрузі. Клеми 15, 16 і 16, 17 – струмові входи
(0...5)мА. А, Б – контрольні гнізда. Демпфер: R5 і С1. Орган настроювання ТДМ
– це потенціометр R5. Операційний підсилювач УВ.22 має вихідний однополярний сигнал. Орган настроювання КП – подільник вихідного сигналу
R21. ТД визначається перемикачем В3 (від R7 до R15), В2 визначає діапазон ТД.
На виході контрольні гнізда В, Г. Вихідні клеми 7-10, 7-9, 7-8
використовуються в залежності від опору навантаження.
14.7. Блоки керування: БУ21 і БУ12
Принципова схема блоку БУ21 показана на рис.14Д. Схема застосування блоку БУ21 наведена на рис.14.18. Блок керування БУ21 призначений для роботи з регулятором Р21, а БУ12 – з Р12.
БУ21 має три положення перемикача режимів: «ручне», «автоматичне», «виключений». Блок являє собою перемикач групи контактів, у ньому є
84
індикаторні лампи «більше» й «менше», і кнопки «>» й «<». В автоматичному режимі БУ21 прямо пропускає командні сигнали із клем 7, 8, 9 з Р21 на вхідні клеми ВП.
У ручному режимі вихідні ланцюги регулятора розмикаються, а керування пускачем здійснюється від кнопок «>» й «<», які живляться від зовнішнього джерела напруги.
ПМРТ-69
7 |
2 |
25 |
1 |
11 |
9 |
|
|
-24В |
26 |
|
|
|
4 |
-24В |
~220В |
|
|
|
|
|
31 |
||
|
|
|
|
|
|
|
|
0 |
6 |
БУ-21 |
21 |
|
|
||
Р21 8 |
8 |
0 |
0 |
||||
|
|
|
|
|
|
||
+24В |
|
|
|
|
22 |
+24В |
~220В |
|
|
|
|
|
|
|
|
0 |
27 |
|
|
|
32 |
0 |
0 |
10 |
23 |
|
24 |
12 |
|||
9 |
|
|
|
||||
Від зовнішнього ланцюга керування
Рис. 14.18. Застосування блоку БУ-21.
БУ12 призначений для зміни режимів роботи системи з Р12 з «ручн.»
режиму в «автомат» та навпаки, і повинен робити це безударно для об'єкта регулювання (рис. 12Д). В його складі є два спарені джерела струмового сигналу Jp’ та Jp”. Один з них Jp’ – головний вихід, сигнал з якого подається на навантаження. Такий самий струмовий задавач Jp”, призначений для керування регулятором Р12 у режимі гарячого резерву, тобто забезпечує готовність до перемикання в режим «автомат». Реле Р своїми контактами 1Р і 2Р перетворює прямий канал блоку в слідкуючу систему, яка відпрацьовує команди оператора при режимі «ручн.», а контактом 3Р на цей час підключає R13 як еквівалент зовнішнього навантаження до вихідного підсилювача УВ21.
85
15. ВИСОКОТОЧНИЙ РЕГУЛЯТОР ТЕМПЕРАТУРИ ВРТ
Регулятор ВРТ побудований на такій самій модульній базі, що і апаратура
«Каскад». Призначений для формування ПІД-закону при роботі з виконавчими пристроями, що представляють собою пропорційну ланку. Область застосування, у першу чергу, об'єкти, де треба регулювати температуру з високою точністю: невеликі промислові печі для обробки виробів в електронній промисловості (мікросхеми, кристали), для випалу металокерамічних виробів, у
порошковій металургії, електропечі. Характерна риса цих об'єктів – нагрівання здійснюється електричним струмом великої потужності. Вихід ВРТ – уніфікований струмовий сигнал, який через тиристорний підсилювач керує подачею енергії в об'єкт.
Регулятор складається з двох блоків И102 і Р111, а також тиристорного підсилювача У252 (рис.15.1).
|
ВРТ |
|
|
|
|
|
|
Хд |
|
|
|
0…5мА |
|
I |
|
И 102 |
|
Р-111 |
У-252 |
ОК |
|||
|
|
||||||
Хзд |
|
|
|
|
|
|
|
Рис.15.1 Система регулювання на базі ВРТ.
Інше застосування ВРТ – із пневматичним ВМ й електро-пневматичним перетворювачем (рис.15.2).
0…5мА |
|
Р |
0,2…1атм |
ВМ |
|
РО |
|
ОК |
|
I |
|
|
пневмат. |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Рис. 15.2 Застосування пневматичного ВМ як виконавчої частини для ВРТ
ХД — сигнал від будь-якої стандартної термопари. Вихід формуючого блоку - 0...5мА.
86
15.1. Вимірювальний блок И102
Структурна схема вимірювального блоку И102 наведена на рис.15Д.
У його складі є укрупнений модуль-задавач МЗ-42, що містить МД01 і МД02 -
для формування з високою точністю й сталістю сигналу завдання (мВ). Сигнал давача подається до клем 15,16. Модуль МК01використовується для компенсації впливу від зміни температури в зоні вільних кінців (містить мідні опори R23 R24). Сигнал похибки Х(t)=ХЗД - ХТП(t) можна контролювати на клемах 12,16.
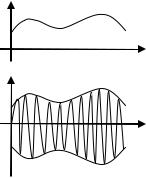
Верхня частина схеми призначена для подальшого перетворення сигналу x(t): фільтрації перешкод, амплітудної модуляції (рис. 15.3), посилення,
демодуляції й згладжування. Сигнал помилки проходить через фільтр, що придушує низькочастотні перешкоди, (дросель низької частоти ДР НЧ ,
конденсатор С13 і опір R72).
x(t)
t
x(t)
t
Рис. 15.3. Амплитудне модулювання сигналу x(t)
У модуляторі сигнал постійного струму Х(t) перетворюється в сигнал змінного струму і накладається на несучу частоту. Для гальванічної розв’язки вхідних і вихідних сигналів служить трансформатор. Далі сигнал надходить до підсилювача змінного струму УВ-3. Підсилювачі змінного струму більш стабільні в порівнянні з підсилювачами постійного струму особливо в області малих сигналів. Далі випрямляч (демодулятор) перетворює цей сигнал у сигнал постійної напруги на виході в діапазоні +1,25... -1,25В. Вихідний R-C фільтр згладжує пульсації після випрямляча. Вихідна напруга:
87
U(t)=Х(t) = [XЗД-XТП(t)]KПС .
Модуль МД02, що формує сигнал завдання, має кілька складових.
Перемикач П1- вводить у сигнал завдання зсув 10мВ. П2 —декадний перемикач, який додає в сигнал завдання n∙1мВ, П3 –додає m∙0,1мВ, змінний опір R60 – p∙0,01мВ. Таким чином, cигнал XЗД = (10,0 +n∙1+ m∙0,1+ p∙0,01)мВ можна встановити з великою точністю у діапазоні 0..21,1мВ. Модуль МД01 –
використовується для стабілізації напруги, якою живиться задавач. Модуль ИП-03 – джерело живлення.
15.2. Формуючий блок Р111
Схема формуючого блоку Р111регулятора ВРТ наведена на рис.16Д.
Функціональні можливості: формування ПІД-закону з вихідним неперервним сигналом 0...5мА( використовується 5-а структурна схема); індикація сигналу неузгодження й вихідного командного сигналу; безударне перемикання режимів роботи системи, плавна зміна командного сигналу в ручному режимі.
Регулятор побудований за блочно-модульним принципом. Модуль УВ1-
підсилювач постійного струму (2-полярний) із двома виходами по струму – головний і по напрузі – у ланцюзі зворотного зв'язку. ИП2 - модуль живлення.
На виході блоку є перемикач режимів роботи, що забезпечує безударне перемикання з автоматичного регулювання на ручне й навпаки, а також задавач вихідної величини, що використовується у ручному (дистанційному) режимі.
Формуючий ЗЗ разом із вхідним колом має змінну структуру для одержання необхідного закону регулювання й показаний на рис.17.4.
П1а
|
П1б |
U(t) П2 |
Uвих |
С1 |
С2 |
|
П3 |
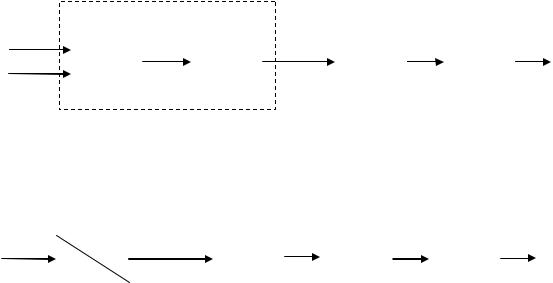
Рис. 15.4. Схема реалізації ПІД-закона в блоці Р111.
88
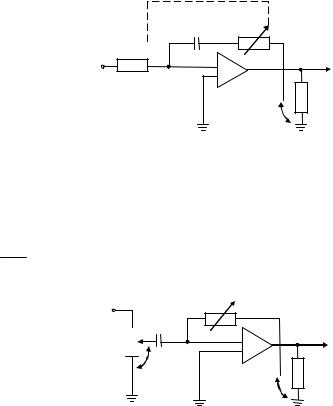
Вхідний сигнал йде по двох паралельних колах.
1)
С2 П1б
П1а
 Uвих
Uвих
α
W1(p)
КР (1
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
П |
|
1 |
|
|
|
|
|
|
|
|
|
|
K |
|
W (р) |
|
К |
|
|
Z |
|
(р) |
|
1 |
|
p C |
|
|
1 |
|
П |
1 |
|
||||||
|
ВХ |
|
ВХ |
|
ВХ |
|
|
1б |
|
2 |
|
|
|
||||||||||||||
|
|
|
ВХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1б |
(1 |
|
) |
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||||
|
KЗЗ WЗЗ (p) |
|
КЗЗ |
|
|
|
|
|
|
|
П1а |
|
|
|
|
П1а |
П1б С2 р |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ZЗЗ (p)
1)
ТІ р
2)П1б
Uвх Секв
Секв
β
 Uвих
Uвих
α
W (p) |
|
|
П1б |
|
|
р П |
С |
|
|
|
р П |
С |
|
К |
|
Т |
|
р, С |
|
С |
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||
2 |
|
|
1б |
|
ЕКВ |
|
1б |
|
2 |
|
Р |
|
Д |
|
ЕКВ |
|
2 |
||||
|
|
|
р СЕКВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) W (p) W (p) K |
Р |
(1 |
1 |
Т |
Д |
р) при Т |
Д |
Т |
І |
. |
|
|
|||||||||||
1 |
2 |
|
T р |
|
|
|
|||||
|
|
|
|
І |
|
|
|
|
|
|
|
На відміну від аналогічного за структурою регулятора Р12 у першому каналі точка приєднання розташована нижче й у виразі КР з'являється додатковий множник КВХ=0,5. За рахунок спареності перемикачів П1а й П1б
органи настроювання КР і ТІ незалежні. Як видно, ТД задається як частина від ТІ,
а органом настроювання служить β. На транзисторі Т зібраний задавач вихідної величини, органом керування якого є R4. Індикатори А1 – сигналу неузгодження та А2 – вихідної величини. П6-перемикач режиму роботи Навантаження з різним опором повинно підключатися до різних виходів: клеми
9,10 – до 1кОм, клеми 8,10 – 1-2кОм, клеми 7,10 – 1-3кОм.
89
16. КОМПЛЕКС ТЕХНІЧНИХ ЗАСОБІВ ''КАСКАД-2''
Ця апаратура призначена для побудови складних систем автоматичного керування відповідальними технологічними процесами (енергоблоки теплових та атомних електростанцій, промислові печі й ін.). Відмінність від комплекса
«КАСКАД» - нові функціональні можливості:
-прецезіонне інтегрування аналогових і дискретних сигналів з більшими постійними часу й пам'яттю, яка не руйнується;
-нелінійне перетворення сигналу (статичне);
-розмноження сигналу з гальванічною розв’язкою;
-аналогове й дискретне автопідстроювання параметрів регулятора;
-виділення максимального і мінімального сигналу з декількох, або максимального (мінімального) значення в одному сигналі;
-підвищена функціональна насиченість і розширена номенклатура блоків.
У комплексі «КАСКАД-2» розширений набір інформаційних сигналів – це уніфіковані струмові сигнали та сигнал постійної напруги 0...10В, крім того передбачається підключення природних сигналів від давачів: ТП - термопари;
ТО - термоопору; від давачів змінного струму типу ДТ. Ще однією конструктивною особливістю апаратури є застосування укрупнених функціональних модулів. Прилади комплексу побудовані за блочно-модульним принципом на базі операційних підсилювачів, інтегральних схем і тиристорів,
що відрізняються високою надійністю. Усі конструктивні рішення уніфікуються: однакові корпуси, розміри, у кожному приладі два укрупнених функціональних модулі й джерело живлення, клемник на 30 клем. Розраховані на широкі діапазони експлуатаційних параметрів зовнішнього середовища – температура до 500С і вологість - до 90%.
Всі модулі поділяються на наступні групи :
-регулювальні (формують закон регулювання);
-формуючі сигнал неузгодження ;
90
-модулі статичного й динамічного перетворення інформації;
-джерела живлення.
УКАСКАДі-2 є ще блоки оперативного керування (з якими взаємодіє оператор) : БУ - змінює режим керування, ПП - покажчик положення, В-12 –
індикатор неузгодження та вихідної величини, ЗД - задавачі (струмові,
потенціометричні). Усього в КАСКАДі-2 є більше 20 блоків стандартної конфігурації. З регуляторами комплексу КАСКАД-2 можуть застосовуватися всі стандартні виконавчі підсилювачі, наприклад, ПМРТ, ПБР, ПМЕ, У-101.
16.1. Блоки й УФМ (укрупнені функціональні модулі) комплексу
КАСКАД-2
|
|
|
УФМ |
||
|
Найменування |
|
|
|
|
N |
Тип |
Алгебраїчний |
Математичн |
||
блоку |
ий |
||||
|
|
модуль |
|||
|
|
|
модуль |
||
|
|
|
|
||
|
|
|
|
|
|
1 |
Блок регулювальний з |
Р17,Р17.1 |
И001,ИД001 |
Р017 |
|
неперервним виходом |
Р17.2,Р17.3 |
ИС001,ИТ002 |
|||
|
|
||||
|
|
|
|
|
|
|
Блок регулювальний з |
Р27,Р27.1 |
И001,ИД001 |
|
|
2 |
дискретним |
Р027 |
|||
Р27.2,Р27.3 |
ИС001,ИТ002 |
||||
|
(імпульсним) виходом |
|
|||
|
|
|
|
||
|
|
|
|
|
|
|
Блок регулювальний з |
|
|
|
|
3 |
імпульсним виходом та |
Р28 |
И001 |
Р028 |
|
|
автопідстроюванням |
|
|
|
|
|
|
|
|
|
|
4 |
Блок підсумовування та |
А05 |
И001 |
А005 |
|
обмеження сигналів |
|||||
|
|
|
|
||
|
|
|
|
|
|
91