

СИСТЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ
.pdf
|
|
|
|
|
|
|
|
|
|
Х’д(t) |
||
Технологічний процес |
Д1 |
|||||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Уніфікований |
|
|
Д2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Рег. |
||||
|
|
|
|
|
|
|
|
|||||
давач |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
пр. |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗД |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Уніфікований вхід
Рис. 5.6. Схема агрегатного введення сигналу давача в регулятор.
6. ЗАКОНИ РЕГУЛЮВАННЯ
Законом регулювання називається математичне співвідношення, що визначає зв'язок між вхідною величиною регулятора, якою найчастіше є сигнал неузгодження x t xЗД t xД t , і вихідною величиною y t , звичайно, це переміщення регулювального органу. У виразах законів регулювання присутні змінні величини – x t і y t , а також постійні коефіцієнти – параметри закону регулювання.
|
|
|
|
|
|
|
|
|
ЗАКОНИ РЕГУЛЮВАННЯ |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Стандартні закони |
|
|
|
|
Нестандартні закони |
|
||||||||
|
|
|
|
|
|
регулювання |
|
|
|
|
|
регулювання |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Лінійні |
|
|
|
|
|
|
Нелінійні |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
П |
|
І |
|
ПІ |
|
ПД |
ПІД |
|
|
|
3-позиційні |
|
|
2-позиційні |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.1. Закони регулювання.
22
6.1.Стандартні нелінійні закони регулювання
Нелінійні закони регулювання можуть бути досить різноманітними, але в стандартних регуляторах звичайно застосовують 2- і 3-позиційні закони регулювання (рис. 6.2, 6.3).
Загальний вигляд запису 2- позиційного закону регулювання: y C1,x 0
C2,x 0
|
|
y |
|
|
y |
|
|
|
|
y |
|
С1 |
|
|
С1 |
|
|
|
С1 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
С2 |
x |
|
С2 |
|
|
С2 |
x |
||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
Рис. 6.2. Приклади двопозиційних законів регулювання.
Величина керуючого впливу характеризується С1 і С2.
Приклади пристроїв, що працюють по двопозиційному закону регулювання: холодильник, праска, кондиціонер. Недолік даного закону – постійні коливання регульованої величини навколо заданого значення.
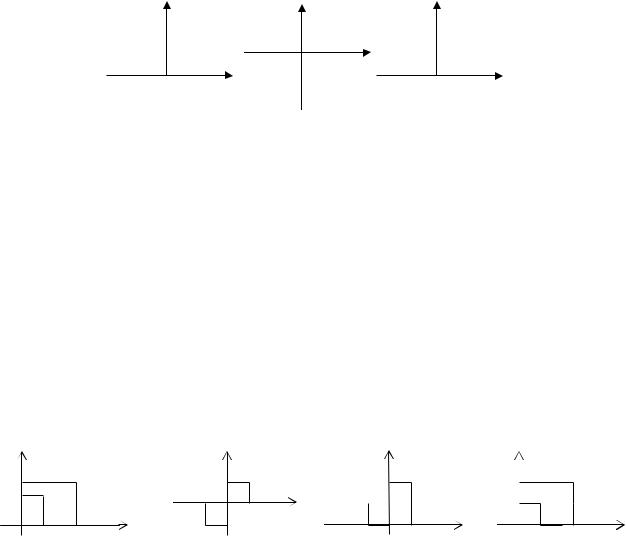
Загальний вигляд запису трипозиційного закону регулювання:
C1,x 1
y C2, 1 x 2C2,x 2
|
y |
|
|
|
|
|
y |
|
|
|
y |
|
|
y |
|
|
||||
C3 |
|
|
|
|
|
C |
|
|
C2 |
|
|
|
C2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
C2 |
|
|
|
|
|
- |
|
x |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
C1 |
|
|
|||||
C1 |
|
|
|
x |
|
|
|
|
|
x |
|
x |
||||||||
|
|
|
|
-C |
|
|
|
|
|
|
|
|
|
|||||||
|
1 |
2 |
|
|
|
- |
|
|
|
|
|
1 |
2 |
|||||||
Рис. 6.3. Приклади трипозиційних законів регулювання.
23
6.2. Стандартні лінійні закони регулювання
Загальний запис стандартного лінійного закону регулювання є відомий пропорційно-інтегрально-диференційний закон :
t |
|
dx(t) |
|
(6.1) . |
|
y(t) C1 x(t) C2 x(t)dt C3 |
|
y0 |
|||
|
|||||
0 |
|
dt |
|
||
Лінійність полягає в тому, що змінна x t , її похідна й інтеграл входять у рівняння закону тільки в перших ступенях. Його окремі випадки: П-, І-, ПІ-,
ПД-закон.
Коефіцієнти С1, С2, С3 показують питому вагу кожної зі складових.
Перша складова використовується самостійно в тому випадку, коли необхідна тільки стійкість системи. Друга складова усуває статичну помилку, що виникає при використанні пропорційного регулятора, але при цьому час перехідних процесів збільшується. Третя складова випереджає реакцію на відхилення регульованої змінної з огляду на швидкість зміни сигналу відхилення, тобто поліпшує властивості регулятора при реакції на швидкомінливі сигнали.
Змінюючи співвідношення між С1, С2 і С3 можна навдавати регулятору ті або інші властивості, так щоб задовольнити вимогам якості регулювання більшості промислових об'єктів.
24
6.2.1. Пропорційний закон регулювання
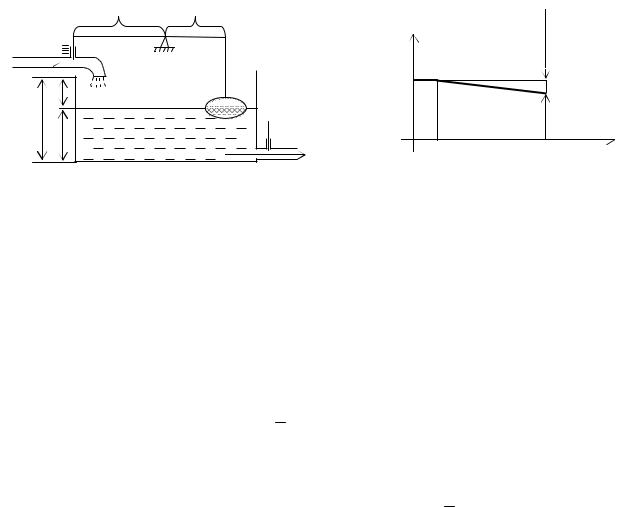
Дослідимо просту систему регулювання рівня рідини в баці ( рис. 6.4).
|
a |
b |
|
Q1 |
y(t) |
|
xзд(t) |
|
|
||
|
x(t) |
|
|
(t) |
|
|
|
зд |
|
|
|
x |
д |
Q2(t) |
|
|
x |
Q0=Q1=Q2 |
|
|
|
|
Статична |
похибка |
Q2(t)
Q2max
|
|
|
|
Рис. 6.4. Система регулювання рівня. |
||
|
|
Розглянемо |
початковий |
статичний режим, |
коли xД t xЗД t , x t 0, |
|
Q1 |
t Q2 t . |
При |
збільшенні |
Q2 t зростає Q1 t , |
це відбувається доти, поки |
|
Q1 |
t |
і Q2 t |
не стануть рівними і знову наступить рівновага. Але при цьому |
|||
нове стале значення xД t не дорівнює заданому, а визначається величиною y(t),
що залежить від нового значення Q1 t .
Закон регулювання: y(t) a x(t) KP x(t) . Далі помітимо, що об'єкт b
керування охоплюється від’ємним зворотним зв'язком, і в рівнянні регулятора
знак «-» за замовчуванням будемо опускати, тобто y(t) a x(t) KP x(t). b
Пропорційний регулятор забезпечує простий швидкодіючий процес регулювання системи, але дає статичну помилку. Цю помилку можна зменшити за рахунок підвищення КР, але не можна усунути остаточно, залишаючись у рамках пропорційного закону. На об'єктах з невисокими вимогами точності цього може бути досить, але треба враховувати, що підвищення КР знижує запас стійкості. З цього випливає, що розрахунок настроювань регулятора ґрунтується на компромісі між точністю і стійкістю. Пропорційні регулятори здійснюють досить стійке регулювання.
25
С1≠0, С2=С3=0 в рівнянні (6.1) дають
y(t) K |
P |
x(t) y |
, де [K |
] |
% ходу ВМ |
, [x] [x |
Д |
], [y] % ходу ВМ, |
|
||||||||
|
0 |
P |
|
[xД ] |
|
|||
|
|
|
|
|
|
|
||
Інші характеристики:
W(p) KP ,
p j W( j ) KP, 0
W( j ) A( ) ej ( ) KP 1 KP ej 0 ,
A( ) KP , ( ) 0,
h(t) KP 1{t} y0 .
|
|
|
|
j·Im (ω) |
|
|
|
|
|
|
Kp |
Re(ω) |
|
|
|
x(t) |
|
|
|
|
1 |
|
|
A(ω) |
|
|
|
|
|
|
t |
|
|
|
|
|
y(t) |
Kp |
|
|
ω |
|
|
|
|
|||
|
|
|
|
|
||
y0 |
|
Kp∙1 |
|
φ(ω) |
|
|
t |
ω |
|
|
|
|||
|
|
|
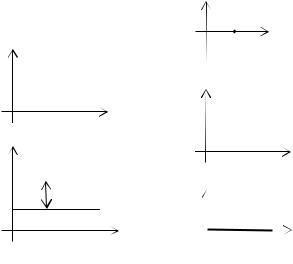
Рис. 6.5. Часові і частотні характеристики П-регулятора.
26
6.2.2. Інтегральний закон регулювання
Інтегральний закон регулювання характеризується відсутністю статичної помилки в системі регулювання і випливає з рівняння (6.1) при С1=С3=0, С2 ≠0.
|
|
t |
|
|
|
1 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
||||
y(t) KІ |
x(t)dt y0 |
|
x(t)dt y0 , |
|
|
|
|
||||||||||||||||
T |
|
|
|
|
|||||||||||||||||||
|
|
0 |
|
|
|
|
I |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
де: [x] [xД ], |
[y] % ходу ВМ, |
[KІ |
] |
% ходу ВМ |
, W(p) |
1 |
, |
||||||||||||||||
|
|
|
|
||||||||||||||||||||
p j W( j ) 1 |
|
|
j 1 |
|
|
|
|
|
|
[xД ] c |
TI p |
||||||||||||
|
|
|
|
|
|
1 e |
2 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jTI |
|
|
|
TI |
|
|
TI |
|
|
|
|
|
||||||
W( j ) |
1 |
, |
A( ) |
1 |
|
|
, ( ) |
|
, |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
TI |
|
TI |
|
|
2 |
|
|
|
|
|
|
|
|||||||||
h(t) |
t |
y0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j·Im (ω) |
|
|
Re(ω) |
|
x(t) |
W(jω) |
|
1 |
A(ω) |
|
|
t |
|
|
1 |
|
y(t) |
ω |
|
1 |
||
|
|
|
|
Tі |
1 |
1 |
|
φ(ω) |
=arctg |
|
|
|
y0 |
Ti |
t |
ω |
-
2
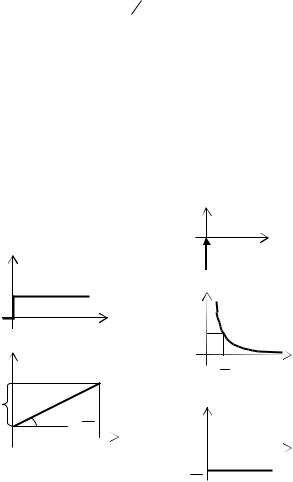
Рис. 6.6. Часові і частотні характеристики І-регулятора.
На різних частотах посилення різне: при малих частотах посилення прямує до нескінченності, що забезпечує відсутність статичної похибки, при високих – до нуля. Інтегральний регулятор на кожній частоті дає затримку
27
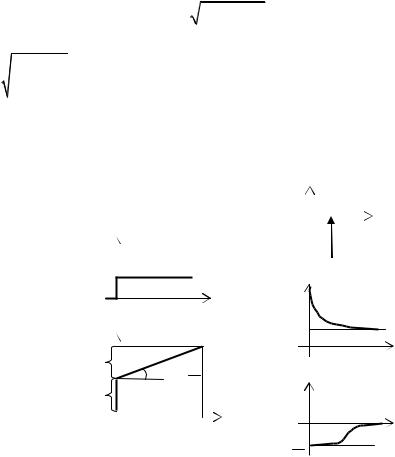
реакції на півперіод, що приводить до більш затягнутих перехідних процесів у системі. До того ж, як відомо з теорії, разом із астатичним об'єктом він дає структурно нестійку систему.
6.2.3. Пропорційно-інтегральний закон регулювання
С3=0; С1,С2 ≠0 в рівнянні (6.1) дають
|
1 |
t |
|
, де [KP ] |
% ходу ВМ |
, [TI ] = c, |
||
y(t) KP x(t) |
|
x(t)dt y0 |
|
|
|
|||
T |
[x |
Д |
] |
|||||
|
I |
0 |
|
|
|
|
|
|
Характеристики:
|
|
|
|
|
|
1 |
|
|
|
, |
|
|
|
|
|
|
|
||||
W(p) KP 1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
TI p |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W( j ) K |
P |
|
KP |
|
K |
P |
j |
KP |
|
KP |
|
||||||||||
|
|
|
|
T |
|
|
|||||||||||||||
|
|
|
T j |
|
|
|
|
|
T |
||||||||||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
I |
|
|
I |
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||
A( ) KP |
|
1 |
1 |
|
|
|
|
, ( ) arctg |
|
||||||||||||
|
2 |
|
|
2 |
|
T |
|||||||||||||||
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
I |
|||
|
|
|
|
|
|
|
t |
|
|
|
|
|
. |
|
|
|
|
|
|||
h(t) K |
P |
|
1{t} |
|
|
y |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
T |
|
|
0 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
||||
T 2 |
2 |
1 e j arctg(1/TI ) |
, |
I |
|
|
|
,
|
|
|
j·Im(ω) |
|
|
|
|
Кр |
Re(ω) |
x(t) |
|
|
W(jω) |
|
1 |
|
t |
A(ω) |
|
|
|
|
||
|
|
|
|
|
y(t) |
|
|
Кр |
ω |
|
|
|
||
|
|
|
|
|
Кр |
1 |
|
|
|
=arctg |
|
φ(ω) |
|
|
Кр |
Ti |
|
|
|
y0 |
|
|
t |
ω |
Тудв=Ті |
|
|
||
|
|
|
||
-
2
Рис. 6.7. Часові і частотні характеристики ПІ-регулятора.
28
TI – час інтегрування (подвоєння) – це час, протягом якого інтегральна складова змінить вихідну величину y(t)настільки, наскільки змінила її перед цим пропорційна складова. Час подвоєння служить мірою інтенсивності інтегральної частини.
Пропорційно-інтегральний закон регулювання – найпоширеніший, тому що він поєднує в собі кращі властивості пропорційного й інтегрального законів,
але на деяких об'єктах ПІ-закон не забезпечує достатньої швидкості.
6.2.4.Пропорційно-диференційний закон регулювання
Врівнянні (6.1) приймається С1,С3≠0; С2=0
|
dx(t) |
|
, де: [KP ] |
% ходу ВМ |
, [TД]=c |
||
y(t) KP x(t) TД |
|
|
y0 |
|
|||
dt |
[xД ] |
||||||
|
|
|
|
|
|||
Характеристики:
W(p) KP (1 TД p)
W( j ) KP j KP TД
W( j ) KP 
 1 TД2 2 e j arctgTД ,
1 TД2 2 e j arctgTД ,
A( ) KP 
 1 TД2 2 , ( ) arctg(ТД ),
1 TД2 2 , ( ) arctg(ТД ),
h(t) KP 1{t} KP TД (t) y0 .
x(t) |
x(t) |
j·Im(ω) |
|
W(jω) |
|||
|
|
Re(ω)
1 |
|
|
|
t |
|
|
t |
|
|
|
Кр |
||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
y(t) |
|
|
|
y(t) |
|
|
|
|
A(ω) |
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Кр |
|
ω |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Кр |
|
|
КрТд |
|
||||||
|
|
|
|
|
=arctgKp |
|
|
|
|
|
|
||
|
|
|
|
|
|
y0 |
Kp=tg / |
t |
|
|
|
|
|
y0 |
|
t |
|
φ(ω) |
|||||||||
|
|
|
|||||||||||
|
|
|
а) |
|
|
|
б) |
|
|
ω |
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
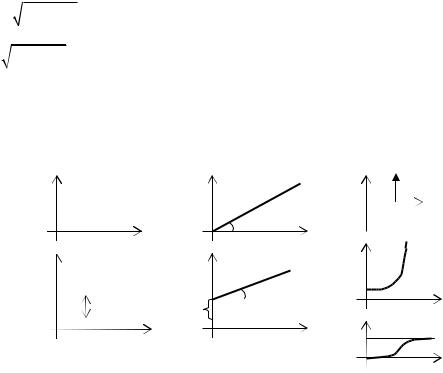
Рис. 6.8. Часові і частотні характеристики ПД – регулятора.
29
а – при впливі на вхід регулятора східчастого сигналу; б – при лінійно-
зростаючому .
ТД – час диференціювання (випередження) чисельно виражає частку диференційної складової в законі регулювання. Диференційна складова інтенсифікує реакцію на швидкі зміни в технологічному процесі, а на повільні збурювання з малою частотою діє слабко.
6.2.5. Пропорційно-інтегрально-диференційний закон регулювання
|
|
|
1 |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
dx(t) |
, де |
|
|
|
% ходу ВМ |
, [TД |
]=c, [TI ]=c. |
|||||||||||||||||||||||||||
y(t) KP x(t) |
|
|
|
|
x(t)dt TД |
|
|
|
|
|
|
y0 |
[KP ] |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
T |
|
|
|
|
|
|
dt |
|
[x |
Д |
] |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
I |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Характеристики: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
W(p) KP 1 |
|
|
|
TД p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
TI p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W( j ) KP 1 |
|
|
|
|
|
|
TД |
|
|
e |
j arctg |
|
TД |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
A( ) KP 1 |
|
|
|
|
TД |
|
|
, ( ) arctg |
TД |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
h(t) K |
P |
1{t} |
KP |
|
t T |
Д |
К |
Р |
(t) y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
TI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j·Im(ω) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
Кр |
W(jω) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Re(ω) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
A(ω) |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
|
Кр |
|
|
|
|
|
|
ω |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Кр∙1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ(ω) |
рез |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K p |
|
|
|
|
|
|
КрТд |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
Кр∙1 |
|
|
=arctg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
y0 |
|
|
|
|
|
|
|
|
Ti |
|
|
|
|
|
|
|
|
t |
|
y0 |
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рез |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
Tудв |
Ті |
|
|
|
|
|
б) |
|
|
|
|
|
- |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
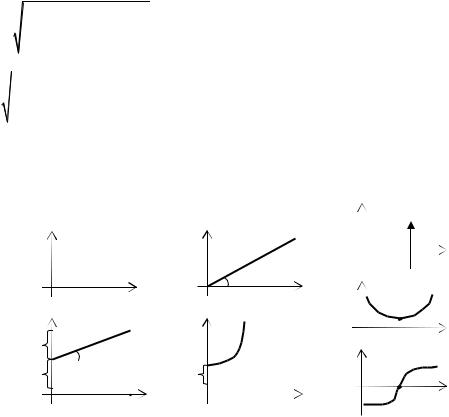
Рис. 6.9. Часові і частотні характеристики ПІД – регулятора.
30
а – при впливі на вхід регулятора східчастого сигналу; б – при лінійно-
зростаючому .
ПІД-закон регулювання має найбільшу гнучкість і може задовольнити вимоги до якості регулювання на більшості реальних об'єктів.
7. ВЛАСТИВОСТІ ВИКОНАВЧИХ МЕХАНІЗМІВ І ЇХ ВРАХУВАННЯ ПРИ ФОРМУВАННІ ЗАКОНІВ РЕГУЛЮВАННЯ
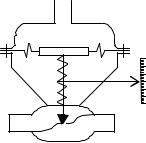
7.1. Пневматичний виконавчий механізм
Пневматичний виконавчий механізм (рис. 7.1) являє собою пропорційну ланку: y(t) KВМ z(t).
Вхідна величина такого виконавчого механізму – тиск, вихідна – переміщення штоку і клапану. Пружина забезпечує лінійні властивості в широкому діапазоні переміщень.
 p(t)=z(t)
p(t)=z(t)
y |
Рис. 7.1. Пневматичний ВМ.
7.2. Гідравлічний виконавчий механізм
Гідравлічний виконавчий механізм (рис. 7.2) являє собою інтегральну
t
ланку: y(t) KВМ z(t)dt .
0
31