

СИСТЕМИ АВТОМАТИЧНОГО РЕГУЛЮВАННЯ
.pdfВхідна величина гідравлічного виконавчого механізму – різниця тисків,
вихідна — переміщення поршня.
z=Δp p1 p2
p2
 y
y
Рис. 7.2. Гідравлічний ВМ.
Такі виконавчі механізми найчастіше застосовуються в системах, де потрібні висока надійність і великі зусилля.
7.3. Електричний виконавчий механізм
Електричний виконавчий механізм (рис. 7.3) будується на базі асинхронного електродвигуна, що живиться змінним струмом. До основних переваг даного виконавчого механізму можна віднести надійність і зручність,
використання електрики для живлення. Недоліками електричного ВМ є його нелінійність і стала швидкість обертання електродвигуна.
const,z 0
y 0,z 0
const,z 0
φ |
|
y’ |
||
C |
|
|
||
|
|
z |
||
|
|
|||
|
0 |
|
||
y(t)=φ(t) |
-C |
|||
|
||||
|
||||
Рис. 7.3. Електричний ВМ та його характеристики.
Керування виконавчим механізмом сталої швидкості здійснюють імпульсним методом (електричними імпульсами змінного струму). Таким чином, електричний ВМ наближають до лінійної (інтегральної) ланки,
32
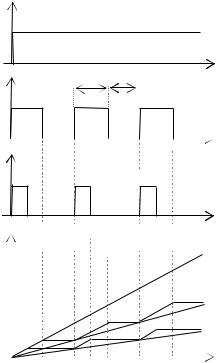
використовуючи як корисну інформацію шпаруватість – відношення часу
імпульсу до суми часу імпульсу і паузи: (t) |
|
tі |
. |
tі |
|
||
|
tп |
||
Змінюючи відстань між імпульсами і їхню тривалість, одержуємо різну середню швидкість виконавчого механізму. Реверсування двигуна здійснюється за рахунок зміни фаз.
z
γ1=1
t
z Ti Tп
 γ2=0.5
γ2=0.5
t
z
 γ3=0.25
γ3=0.25
t y







1
2
3 t
Рис. 7.4. Імпульсний спосіб керування швидкістю ВМ сталої швидкості Існують два способи модуляції сигналу z t , які призводять до зміни
величини шпаруватості і придатні для керування виконавчим механізмом:
1.Широтно-імпульсна модуляція (ШІМ). У цьому випадку фіксується сума tі tп , для зміни шпаруватості змінюють tі .
2.Часо-імпульсна модуляція (ЧІМ). При цьому способі задаються постійною тривалістю імпульсу tі , змінюючи tп .
33
Ми можемо керувати середньою швидкістю виконавчого механізму в межах від 0 до yMAX , причому yMAX залежить тільки від конструкції виконавчого механізму.
Частотний діапазон, у якому ВМ доводиться працювати при регулюванні
теплоенергетичних об'єктів знаходиться в межах від 0 до 10 с-1, і саме тут важлива близькість його властивостей до бажаних лінійних. Таким чином, у
середньому ВМ можна описувати рівнянням інтегральної ланки:
|
1 |
(t)dt . |
|
yср |
|
|
|
T |
|||
|
|
ВМ |
|
Za(t) Z(t)=U(t) y(t)
|
ВП |
|
ВМ |
|
||
γ(t) |
|
γ(t) |
|
y(t) yCP |
1 |
(t)dt |
|
|
|||||
|
|
T |
||||
|
|
|
|
|
BM |
|
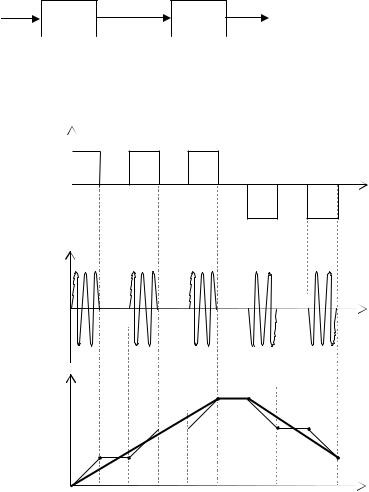
Рис. 7.5. Структурна схема виконавчої частини регулятора
Za
γ(t)
t
Z
γ(t)
t
y
ycp

 y(t)
y(t)
t
Рис. 7.6. Модуляція командного сигналу z t у виконавчому підсилювачі
34

8. СПОСОБИ ФОРМУВАННЯ СТАНДАРТНИХ ЗАКОНІВ
РЕГУЛЮВАННЯ
8.1.Основні засоби формування стандартних законів регулювання
Основний спосіб формування законів регулювання – застосування у
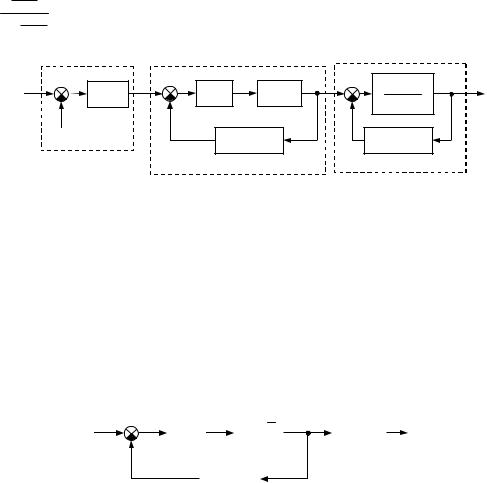
формуючому блоці зворотних зв'язків (формуючих і коригувальних). При використанні формуючих зворотних зв'язків (рис. 8.1), коли охоплюється кілька структурних елементів, на цій ділянці одразу отримуємо необхідну передатну функцію. Коригувальний зворотний зв'язок, що охоплює один елемент,
використовують для надання йому бажаних динамічних властивостей. Іноді корекцію використовують для ослаблення впливу нелінійних властивостей окремих елементів, наприклад, релейних підсилювачів. Крім зворотних зв'язків,
для одержання бажаних законів регулювання, використовуються відповідні динамічні властивості конструктивних елементів регуляторів.
WP |
(p) |
WП (р) WВМ (р) |
|
1 WП (р) WВМ (р) WЗ3(р) |
|||
|
|
хзд х |
σ |
WВМ(p) |
|
WП(p) |
|
хд |
хзз |
WЗЗ(p) |
y
Рис. 8.1. Схема формуючого зворотного зв'язку.
Якщо WП (р) , то WП (р) WВМ (р) WЗЗ (р) 1, тобто одиницею в
знаменнику можна знехтувати. Тоді W(р) 1 . На цьому співвідношенні
WЗЗ (р)
базується використання ланцюга зворотного зв'язку як формуючого елементу.
35
Якщо необхідно, щоб виконавчий механізм був пропорційною ланкою з
КР=1 (рис.8.2), то берутьWKЗЗ (p) 1. При малому ТВМ одержуємо:
|
1 |
1. |
|
|
|
|
|
W (p) TВМ p |
|
|
|
|
|
||
ВМ |
1 T 1 |
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
ВМ |
|
|
|
|
|
|
|
хзд |
ВБ |
х |
ФБ |
|
ВМ |
y |
|
W(p) |
1 |
|||||
|
|
КВБ |
|
КП |
TВМ p |
|
|
|
|
хд |
|
|
|
|
|
|
|
|
|
WФЗЗ(p) |
WКЗЗ(p) |
|
|
|
|
|
|
|
|
||
Рис. 8.2. Застосування ФЗЗ і КЗЗ у структурі регулятора.
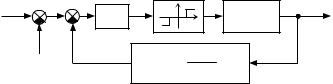
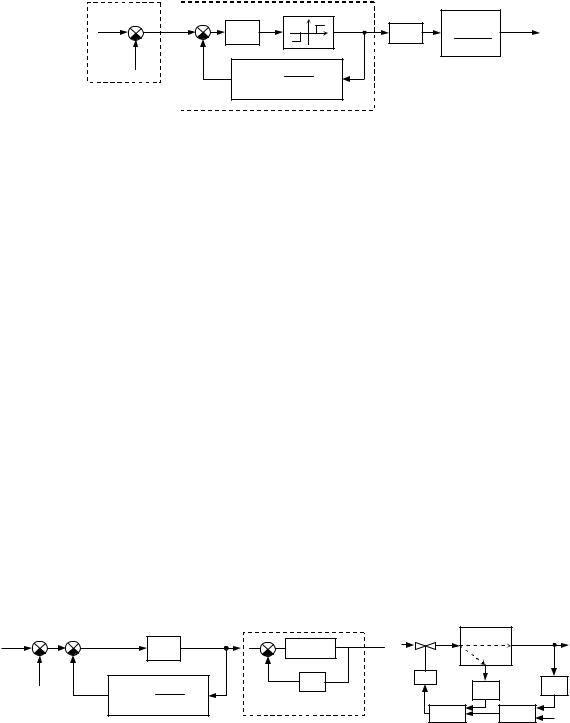
Часто в складі регуляторів використовують релейний підсилювач,
властивості якого бажано наблизити до лінійного. Це можливо при застосуванні схеми, де зворотний зв'язок охоплює підсилювальні елементи, як
показано на рис. 8.3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х |
σ |
|
|
|
|
|
|
|
|
|
|
|
Z |
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
КП |
|
|
|
|
|
|
|
|
|
|
WВМ(p) |
|||||
|
хзз |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
WЗЗ(p) |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||||
Рис. 8.3. Застосування ЗЗ у регуляторах з імпульсним вихідним сигналом. |
||||||||||||||||
При правильному підборі зворотного зв'язку xЗЗ |
повинний бути близький |
|||||||||||||||
до х, тобто зворотний зв'язок повинен компенсувати помилку протягом
тривалого часу, тоді W(p) |
Z(p) |
|
Z(p) |
|
1 |
. При такій побудові усунуті |
X(p) |
|
WЗЗ (p) |
||||
|
|
XЗЗ (p) |
|
|||
шкідливі властивості нелінійного ланцюга, передатна функція між x і z
визначається зворотним зв'язком. Режим роботи, коли x xЗЗ , називається ковзним режимом роботи.
36

8.2. Способи формування пропорційного закону
8.2.1. 1-й спосіб формування пропорційного закону
хзд х |
W1(p) |
y |
КВБ |
WВМ(p) |
|
хд |
|
WЗЗ(p) |
Рис. 8.4. 1-а структурна схема формування П-закону.
W (p) K |
|
|
W1(p) WВМ (p) |
|
|
KВБ |
К |
|
. |
||
|
1 W (p) W (p) K |
|
|
|
|||||||
P |
ВБ |
|
ЗЗ |
|
К |
ЗЗ |
Р |
|
|||
|
|
|
1 |
ВМ |
|
|
|
|
|||
Висновки:
-схема реалізує пропорційний закон регулювання;
-ступінь точності реалізації залежить від величини К1;
-орган настроювання КР розташований у формуючому зворотному зв'язку. Градуювальна характеристика органу настроювання – гіперболічна.
8.2.2.2-й спосіб формування пропорційного закону
хзд х |
КП |
WН(p) |
y |
КВБ |
WВМ(p)=КВМ |
||
хд |
WЗЗ(p) |
|
|
Рис. 8.5. 2-а структурна схема формування П-закону.
WP (p) КВБ КФБ КВМ , КФБ |
КП WH |
|
|
1 |
||||
1 К |
П |
К |
ЗЗ |
W |
К |
ЗЗ |
||
|
|
|
H |
|
|
|||
Висновки:
- схема реалізує пропорційний закон регулювання;
37

-ступінь точності реалізації залежить від величини KП ;
-орган настроювання розташований у формуючому блоці (у модулі зворотного зв'язку). Градуювальна характеристика – нелінійна (наближена до обернено пропорційної).
8.3.Способи формування інтегрального закону
8.3.1. 1-й спосіб формування інтегрального закону
W (p) |
KВМ |
|
1 |
. |
|
|
|||
P |
ТІ* р |
ТІ р |
||
хзд |
х |
1 |
|
z |
y |
|
|
T * |
p |
|
КВМ |
|
хд |
І |
|
|
|
|
|
|
|
|
Рис.8.6. 1-а структурна схема одержання І-закону.
Висновки:
-схема реалізує інтегральний закон регулювання;
-градуювальна характеристика органу настроювання ТІ – лінійна.
8.3.2.2-й спосіб формування інтегрального закону.
хзд х |
z |
1 |
y |
|
КП |
TВМ |
p |
хд |
|
||
|
|
|
Рис. 8.7. 2-а структурна схема формування І-закону.
W (p) |
КП |
|
1 |
|
|
|
|||
P |
ТВМ |
р |
ТІ р |
|
|
||||
Висновки:
38

-схема реалізує інтегральний закон регулювання;
-параметр настроювання ТІ визначається властивостями виконавчого механізму TВМ і підсилювача КП , де і розташований орган настроювання.
8.4. Формування пропорційно-інтегрального закону
8.4.1.1-й спосіб формування пропорційно-інтегрального закону
Пропорційно-інтегральний закон регулювання – найбільш розповсюджений закон, який може задовольнити вимоги більшості об'єктів регулювання.
|
|
|
|
хзд |
х |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КП |
|
|
КВМ |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
хд |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TІ p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Рис. 8.8. |
1-а структурна схема формування ПІ-закону. |
||||||||||||||||||||||||||||
W (p) |
1 |
1 |
К |
|
К |
|
К |
|
|
|
1 |
|
1 |
; |
К |
|
К |
|
К |
|
, Т |
|
Т |
. |
||||||
|
|
П |
ВМ |
Р |
|
|
|
Р |
П |
ВМ |
І |
|||||||||||||||||||
P |
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
1 |
|
|||||||||||||
|
|
T1 p |
|
|
|
|
|
|
|
|
|
|
І р |
|
|
|
|
|
|
|
|
|
|
|
||||||
Висновки:
- наведена структурна схема з великою точністю реалізує пропорційно-
інтегральний закон; - органи настроювання – КП і Т1, градуювальні характеристики органів
настроювання – лінійні.
39
8.4.2. 2-й спосіб формування пропорційно-інтегрального закону
хзд х |
НЕ |
|
|
ВМ |
y |
|
КП |
|
|
y′=const |
|
|
|
|
|
|
|
хд |
W (p)= |
T1p |
K |
ЗЗ |
|
|
ЗЗ |
T p+1 |
|
|
|
|
|
1 |
|
|
|
Рис. 8.9. 2-а структурна схема формування ПІ-закону.
|
К |
|
W |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
ВМ р |
|
|
1 Т1 р 1 |
|
1 |
|
|||||||||
WP (p) |
|
П |
|
НЕ |
Т |
|
|
КР (1 |
) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1 |
|
|
|
|
Т1 р |
КЗЗ Т1 р |
ТI р |
|||||||
1 КП WНЕ |
|
|
КЗЗ |
|
|
|
|||||||||||
ТВМ р |
Т1 р 1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
||||||||||
де: KP |
|
1 |
, ТІ |
Т1 . |
|
||||
|
|
KЗЗ |
|
|
Висновки:
- ця схема дозволяє з досить високою точністю одержати пропорційно-
інтегральний закон регулювання; - ступінь точності залежить від вибору величини КП .
Недолік схеми полягає в тому, що зворотним зв'язком охоплюється виконавчий механізм, у якому необхідний давач зворотного зв'язку. Це менш надійне рішення. Градуювальні характеристики органів настроювання: КР –
гіперболічна, ТІ – лінійна.
40
8.4.3. 3-й спосіб формування пропорційно-інтегрального закону
ВБхзд |
х |
ФБ |
НЕ |
|
|
ВМ |
y |
|
КП |
|
|
ВП |
1 |
|
|
|
|
|
|
TВМ p |
|
||
хд |
|
|
|
|
|
|
|
|
W (p)= |
1 |
K |
ЗЗ |
|
|
|
|
|
ЗЗ |
T p+1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
Рис. 8.10. 3-я структурна схема формування ПІ-закону
W (p) |
|
КП WНЕ |
|
1 Т1 |
К |
|
ТІ р 1 |
, де Т |
|
Т |
, К |
|
|
Т1 |
. |
|
|
|
1 |
|
|
|
І |
Р |
|
||||||||
P |
|
|
ТВМ р Т1 |
|
Р ТІ р |
1 |
|
|
ТВМ КЗЗ |
|
||||||
1 К |
П WНЕ |
Т1 р 1 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Висновки:
- дана схема дозволяє з заданою точністю реалізувати пропорційно-
інтегральний закон регулювання;
-ступінь точності реалізації залежить від величини КП у прямому каналі;
-органи настроювання розташовуються у формуючому зворотному зв'язку. Органи настроювання взаємозалежні (тобто KP f TI ), градуювальна
характеристика КР – нелінійна, ТІ – лінійна.
8.4.4. 4-й спосіб формування пропорційно-інтегрального закону
хзд |
х |
y |
y′=const |
РО |
W1 |
y |
|
|
КП |
|
W2 |
|
|
|
|
|
|
|
|
|
хд |
хзз |
T p |
1 |
ВМ |
Д2 |
Д1 |
|
|
1 |
ВМ |
|
|
|
|
|
WЗЗ(p)= T p+1KЗЗ |
|
|
|
|
|
|
1 |
|
Рег.2 |
Рег.1 |
хзд |
|
|
|
|
Рис. 8.11. 4-а структурна схема формування ПІ-закону.
41