

TSA_IMRO_Метрология 2
.pdf10 є нерухливою по відношенню до гайки 13, але при монтажі регулювального клапану до виконавчого механізму за допомогою ручного приводу вона має можливість переміщуватись відносно гайки 13.
Рисунок 7.3 – Конструкція встановлення кінцевих вимикачів виконавчого пристрою.
Два потенціометри 1, що також розташовані у керуючій коробці, мають точно визначений хід 16, 25 чи 40 мм і повинні використовуватись для регулювального клапану з таким самим ходом.
Пропускна характеристика клапану – лінійна, максимальна пропускна здатність Кv – 10т/год, припустиме протікання у затворі клапану – до 0,1% від Кv.
7.3 Опис лабораторного стенду
Схема для зовнішніх електричних з’єднань виконавчого пристрою наведена на рис.7.4, а схема лабораторного стенду містить виконавчий пристрій ВП, блок керування БУ-21, тумблер Т0 подачі електроживлення та дистанційний покажчик положення регулювального органу ДУП-М.
7.4 Порядок виконання роботи
7.4.1 Визначення гістерезісу датчика положення
Встановити тумблер Т0 у положення „вкл.”. за допомогою кнопки БУ-21 вивести ВП в положення „відключ.”, про що буде свідчити спрацьовування кінцевого вимикача ВП і встановлення стрілки на нульову позначку.
Провести вимірювання сигналу датчика у шести точках, рівномірно розташованих у межах діапазону повного ходу вихідного органу (штоку). Вимірювання провести окремо для кожного напрямку руху вихідного органу механізму. Знайти гістерезис як різницю значень сигналу, що вимірюється покажчиком ДУП-М, у вибраних точках діапазону повного ходу вихідного органу для обох напрямків руху. Результати випробувань звести до таблиці 7.1.
|
|
М |
|
|
|
|
|
|
|
|
МЗ |
С |
|
|
|
|
|
|
|
|
|
ПЗ |
|
|
ПО |
|
БЗ |
БО |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 10 11 12 13 14 15 16 17 18 19 20 |
|
~220 В |
«Закрито» |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
«Відкрито»
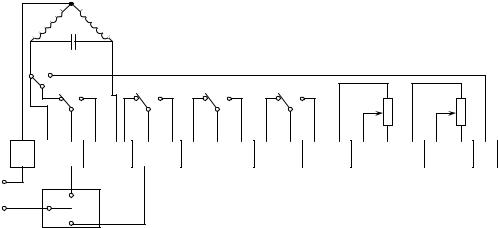
Рисунок 7.4 – Схема електрична принципова механізму типу ЕСПА-02 ПВ 202: М – електродвигун типу ЕОРКП 041/4; С – конденсатор МК-4 мкФ; R1 і R2 – потенціометри; М3 – мікроперемикач по моменту «закрито»; П3 і ПО – мікроперемикачі відповідно по положенню «закрито» і «відкрито»; БЗ і БО – мікроперемикачі для блокування «закрито» і «відкрито» відповідно.
TД = t |
S |
; |
(7.1) |
|
|||
|
∆S |
|
|
де S – номінальне значення повного ходу вихідного органу механізму,
мм.
7.4.2 Визначення вибігу вихідного органу
Включити ВП, натиснувши кнопку БУ-21, і при походженні покажчиком положення штоку виконавчого механізму через оцифровану риску шкали розірвати коло живлення, відпустивши кнопку БУ-21. Після остановки руху покажчика штоку визначити на яку відстань (мм) перемістився покажчик після відключення живлення. Відлік провести в обох напрямках, а результат занести в табл.. 7.1. Кінцевий результат буде дорівнювати середньоарифметичному значенню по даним випробувань.
Таблиця 7.1 – Результати визначення гістерезісу датчика положення ВП
№ |
Положення |
Значення покажчи- |
Різниця |
Величина вибігу, |
|||
випро- |
ви- |
|
ка |
показань, |
|
Мм |
|
буваня |
хідного ор- |
положення, % |
% |
|
|
||
|
гану |
|
|
|
|
|
|
|
Прямий |
|
Зворотній |
|
Прямий |
Зворотній |
|
|
(штоку), мм |
хід |
|
хід |
|
хід |
хід |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.4.3 Визначення середньої відносної швидкості переміщення вихід-
ного органу
Випробування проводяться (не менше п’яти) при тривалості командного сигналу ∆t ≤ 1с. з одночасним вимірюванням переміщення ∆S (мм). Середню відносну швидкість V обчислюють за формулою:
V = |
∆S |
* |
TД |
(7.2) |
|
|
|
||||
S |
∆t |
||||
|
|
|
Абсолютну швидкість V’ (мм/хвил). Переміщення штоку знаходять за рівнянням:
V ' = |
∆S |
(7.3) |
|
∆t |
|
7.5. Контрольні питання:
1)Призначення, особливості конструкції виконавчого пристрою типу ЕСПА 02 РГ?
2)Дати визначення основним характеристикам виконавчого електричного механізму чи регулювального органу?
3)Навіщо застосовується зворотній зв'язок по положенню виконавчого механізму в АСР?
4)Навести класифікацію існуючих електричних виконавчих пристроїв.
8. ВИЗНАЧЕННЯ ХАРАКТЕРИСТИК ПНЕВМАТИЧНОГО ВИКОНАВЧОГО ПРИСТРОЮ З МЕМБРАННИМ ПРИВОДОМ.
8.1. Ціль роботи
o ознайомитись з конструкцією і роботою пневматичного виконавчого пристрою;
o засвоїти методику визначення основних характеристик виконавчого пристрою;
oпобудувати робочу характеристику мембранного виконавчого механізму;
oвизначити коефіцієнт пропускної здатності регулювального органу.
8.2.Конструкція та характеристики пневматичного виконавчого
пристрою
За призначенням пневматичні виконавчі пристрої ідентичні попередньому, а серед основних характеристик додатково до наведених у розділі 8.2 слід виділити робочу характеристику, що визначає залежність величини переміщення штоку від тиску повітря над мембраною, і гістерезіс ходи штоку, тобто різницю ходи штоку поміж прямим та зворотнім переміщенням штоку на одному і тому рівні тиску повітря над мембраною. На рис. 8.1. представлена загально прийнята конструкція мембранного виконавчого механізму прямої дії (ППХ), основними елементами якого є мембранна камера, кронштейн з пружиною і рухлива частина.
Мембранна камера утворена кришками 1,3 і затиснутою між кришками мембраною 2. Кришка 3 прикріплена до кронштейну 5. Верхня кришка і мембрана утворюють робочу порожнину. Рухлива частина складається з опорного диску 4, до якого прикріплена мембрана 2 і шток 7 із з’єднувальною гайкою 10. Остання призначена для з'єднання штоку механізму зі штоком регулювального органу. Пружина 6 одним торцем спирається в опорний диск 4, а іншим через
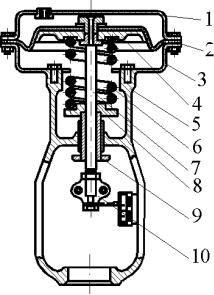
опірне кільце 8 – у регулювальну втулку 9, яка служить для зміни початкового натягування пружини і напрямку руху штоку.
Рисунок 8.1 – Конструкція мембранного виконавчого механізму.
8.3. Опис лабораторного стенду
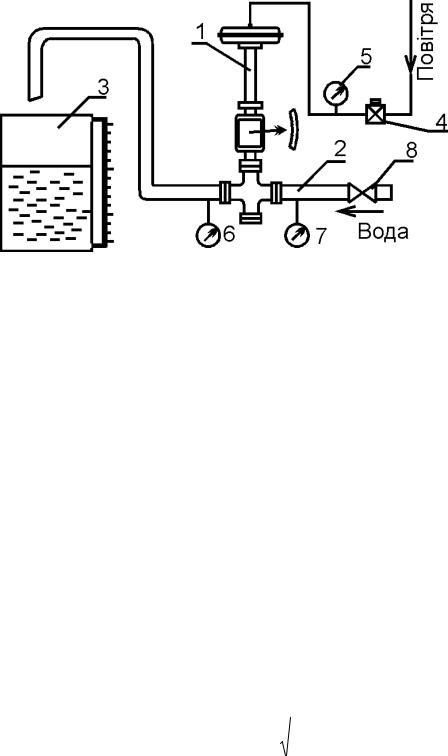
Схема установки для дослідження характеристик мембранного регулювального клапану наведена на рис. 8.2. і складається з пневматичного регулювального клапану 1, встановленого на водяному трубопроводі 2, мірного бака 3, редуктора тиску стислого повітря 4, манометра 5, манометрів 6 і 7 для визначення перепаду тисків на регулювальному органі і запірного крану 8. Шкала індикатора переміщення штоку клапана напору про градуйована у відсотках від повної ходи штоку, що складає 13 мм.
8.4 Порядок виконання роботи
8.4.1 Визначення робочої характеристики виконавчого механізму
Підготувати таблицю випробувань – табл. 8.1, за наступною формою. Подати стисле повітря на регулювальний клапан і змінюючи його тиск за допомогою редуктора 4 здійснювати контроль переміщення (S) штоку (% і мм) при прямому і зворотному ході. Результати занести до табл.. 8.1. Визначити вели-
чину гістерезісу і величину нечутливості виконавчого механізму, попередньо побудувавши графіки S=f(P)
Рисунок 8.2 – Схема лабораторного стенду.
8.4.2 Визначення витратної та пропускної характеристики виконав-
чого пристрою
Підготувати таблицю випробувань згідно з таблицею 8.2.
Відкрити кран на трубопроводі і подати воду через клапан. Змінюючи тиск повітря над мембраною згідно табл.. 8.1 проводити контроль ходу клапану і витрати води у бачок. Отримані дані занести до таблиці 8.2. Побудувати графік витратної характеристики V=f(S). За результатами випробувань розрахувати коефіцієнт пропускної здатності клапану Кv (м3/год) для кожного положення S за формулою:
3 |
|
ρ |
|
|
|
Кv=36*10 *V* |
|
, |
(8.1) |
||
∆P |
|||||
де V – максимальна об’ємна витрата води, м3/с; ρ – густина води, кг/м3;
∆P – перепад тиску на клапані, Н/м2.
Таблиця 8.1 – Результати випробувань по визначенню робочої характеристики виконавчого механізму.
|
|
|
Переміщення штоку |
|
Величина |
Величина |
|||
|
повітря над мембраною, |
|
|
|
|
гістерезісу, |
нечутливості |
||
Тиск (Р) |
Прямий хід |
Зворотній хід |
|||||||
|
|
|
|
|
|
мм |
клапану, |
||
|
|
|
|
|
|
|
МПа |
||
% |
|
мм |
% |
|
мм |
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,06 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,08 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 8.2 – Результати випробувань по визначенню витратної і пропускної характеристики виконавчого пристрою.
Тиск Р повітря |
Перепад ∆ Р тис- |
Ход S штоку, |
Вибрита V |
над |
ку |
мм |
води, |
мембраною, |
на клапані, |
|
л/хвил. |
МПа |
МПа |
|
|
|
|
|
|
Побудувати графік пропускної характеристики Кv=f(S).
8.5. Контрольні питання
1)Призначення, особливості конструкції виконавчого пристрою?
2)Основні характеристики виконавчого пристрою з мембранним приводом?
3)Призначення позиціонерів при роботі у складі мембранних виконавчих пристроїв?
4)Дати визначення поняття пропускної здатності та пояснити необхідності її введення.
9.ПОВІРКА ТА ДОСЛІДЖЕННЯ ХАРАКТЕРИСТИК ПНЕВМОЕЛЕКТРИЧНОГО ПЕРЕТВОРЮВАЧА ТА СТАБІЛІЗАТОРА
ТИСКУ ПОВІТРЯ.
9.1 Ціль роботи
oпневмоелектричного перетворювача ПЭ-55М та стабілізатора тиску повітря СДВ 6;
oпровести повірку перетворювача ПЭ-55М та стабілізатора тиску повітря СДВ 6;
oвизначити рівняння реальної характеристики перетворювача ПЭ-55М із застосуванням ЕОМ.
9.2 Конструкція та принцип дії стабілізатора тиску повітря
Стабілізатори тиску повітря застосовуються з ціллю підтримання тиску живлення пневматичних пристроїв та приладів на випадок коливання тиску повітря в лініях живлення. Обладнання СДВ 6 забезпечує регулювання тиску на виході у межах 0,02 – 0,3 МПа при зміні тиску на вході в інтервалі 0,35 – 0,8.
Стабілізатор тиску із скидом в атмосферу (рис. 9.1) являє собою пропорційний регулятор, підтримуючий постійний тиск в камері 3, з’єднаною зі споживачем. На вході та виході стабілізатора встановлюються манометри. Роль вимірювального пристрою виконує мембрана 4, на якій виникає сила, пропорційна поточному значенню Рт. Ця ж мембрана є елементом управління, на якому порівнюється зусилля, розвинене мембраною 4, та зусилля стиску пружини 5, що виконує роль задатчика стабілізуємого тиску. Установка завдання виконується за допомогою установочного гвинта 6. Клапан 2 з порожнім штоком 7 та пружиною 1, змінюючи свій прохідний переріз під час змінювання тиску
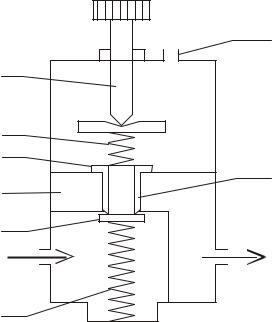
Рстаб відновлює тиск під мембраною. У випадку підвищення тиску частина повітря випускається через клапан штоку 7 та отвір 8 у корпусі стабілізатору в атмосферу, що призводить до вирівнювання тиску в камері 3.
|
8 |
6 |
|
5 |
|
4 |
7 |
|
|
3 |
|
2 |
Рстаб |
|
Рт
1
Рисунок 9.1 – Стабілізатор тиску з скидом в атмосферу
9.3 Опис лабораторного стенду
Схема лабораторного стенду наведена на рис. 9.2.
Стенд складається з фільтра 1, редукторів тиску повітря 2 і 3, манометрів 4 та 5, перемикача пневматичного роду робіт 6, стабілізатору 7 тиску СДВ - 6, зразкового манометру 8, вторинного показуючого пневматичного приладу 9 типу ПВ1.3, пневмоелектричного перетворювача 10 типу ПЭ-55М, міліамперметру 11 типу М1830 вузькопрофільного з світловим показчиком. Для подання стислого повітря служать крани К0, К1 та К2. Включення електроживлення здійснюється тумблерами Т0, Т1, Т2 та Т4, а тумблером Т3 підключається міліамперметр 11 до виходу перетворювача 10. Опором R змінюється зовнішнє навантаження від 0 до 2,5 кОм. Трансформатор 12 утворює вихідну напругу 6,3 В, необхідну для живлення міліамперметру 11.