

II. Исследование деформированного и напряженного состояния в точке абсолютно упругого тела
Одной из важных моделей сплошной среды является абсолютно-упругое тело Гука, т.е. среда, которая полностью восстанавливает свою форму после снятия внешних нагрузок. Под действием внешних сил такое тело деформируется и в нем возникает внутреннее напряжение. Для реальных тел при больших внешних нагрузках возникают такие внутренние напряжения и, соответственно, деформации, при которых начинается разрушение материала. Предель-ные напряжения или допустимые напряжения для различных материалов задаются в справочниках. Поэтому при исследовании механических характеристик упругих тел под воздействием внешних нагрузок важно уметь определять величины максимальных напряжений и деформаций.
2.1. Постановка задачи
Для абсолютно упругого тела заданы (см. таблицу 2.1):.
1 .Упругие постоянные материала — модуль упругости Е (Н/м2) и коэффициент Пуассона V.
2.Поле перемещений для любой точки U(x,y,z), V(x,y,z), W(x,y,z) (миллиметры).
3. Точка М, положение которой задано единичным вектором
![]()
где I, т, п — направляющие косинусы вектора ОМ или, поскольку
\ОМ\ = 1, координаты точки М.
Необходимо определить деформационное и напряженное состояние материала в точке М и графически изобразить деформации и вектор полного напряжения по наклонной площадке. Данные взять из таблицы 2.2.
2.2. Исследование деформированного состояния в точке абсолютного упругого тела
Под действием внешней нагрузки абсолютно упругое тело деформируется, при этом частицы сплошной среды тела перемещаются относительно неподвижной среды координат. Поле перемещений частиц определяется векторной функцией
![]()
где U, V, W— функции проекции вектора перемещений S на оси Ox, Оу и Оz.
Согласно теореме Гельмгольца частицы сплошной среды в общем случае совершают поступательное, вращательное и деформационное движения.
Деформационное движение определяется тензором деформаций:
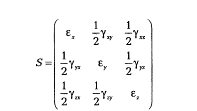
где £x,Ey,ez —относительные удлинения (линейные деформации)
вдоль осей Ох, Оуи Oz соответственно; у^ = у у/, У„ =У„; Ууг = Yzy — углы сдвига (угловые деформации) в координатных плоскостях хОу, zOx, yOz, соответственно.
Компоненты тензора деформаций S выражаются через проекции векторной функции перемещений S с помощью формул Коши:

Относительное удлинение ех вдоль какого-либо направления, за-
даваемого единичным вектором у = li -t-m/ + nA в окрестности точ-
ки M(x0,y0,z0) можно определить с помощью компонентов тензора деформаций 5 следующим образом:
![]()
Чтобы получить полную картину деформации в точке M(l,m,n), необходимо:
1. Вычислить компоненты тензора деформаций. Для этого в результаты вычислений по формулам (2.3) необходимо подставить вместо текущих координат числовые значения х=1, у=т, z—n.
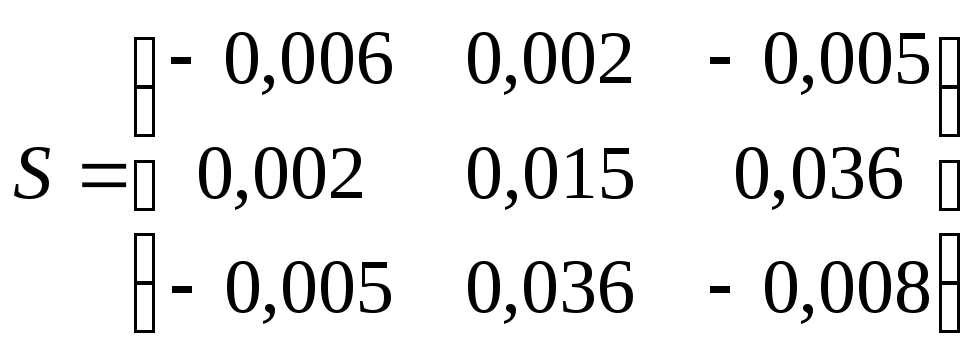
2. Записать тензор деформаций в точке М в виде числовой матрицы.
3. Рассчитать относительное удлинение ей/ч по формуле (2.4)
4. Графически изобразить схематично деформацию единичного куба в виде рисунков 3-х проекций куба на плоскости хОу, zOx, yOz с указанием полученных в результате расчетов знаков деформаций, как указано в качестве примера на рис. 2.1.

Рис. 2.1
Задача №4(3.1)
M(1,-1,2)
![]()
![]()
![]()
![]()
1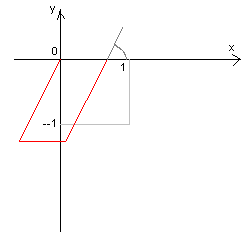 .
.![]() -уменьшение
по оси ох
-уменьшение
по оси ох
![]() -удлинение
по оси оу
-удлинение
по оси оу
![]() -уменьшение
по оси оz
-уменьшение
по оси оz
![]()
![]()
2.![]() -тупой
угол
-тупой
угол
![]() -острый
угол
-острый
угол
![]() -тупой угол
-тупой угол
![]()
![]() M
M
![]()
-удлинение вектора n.

![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()