

4. Расчёт и исследование двухконтурной астатической сар с последовательной коррекцией
Из способа оптимизации САР по симметричному оптимуму следует, что для получения астатической характеристики во внешний контур необходимо ввести интегрирующее звено, оставив внутренний контур таким же, как и при техническом оптимуме. Регулятор внутреннего контура имеет ту же передаточную функцию. Поэтому дополнительных исследований внутреннего контура для астатической системы не требуется.
Необходимо только иметь в виду, что передаточная функция регулятора в этом случае будет
![]()
Передаточная функция внутреннего замкнутого контура
![]()
И в случае его аппроксимации (упрощения)
![]()
4.1 Исследование астатической двукратно интегрирующей сар по управляющему воздействию
В соответствии с принципом оптимизации структурной схемы САР, настроенная по симметричному оптимуму, имеет вид (рис. 13).

Рис. 13 Структурная схема астатической САР в общем виде
Передаточная функция регулятора внешнего контура
![]()
Так
же, как и для статической системы
исследуется реакция САР при управляющем
и возмущающем воздействии ![]() в отношении входных координат внешнего
контура
в отношении входных координат внешнего
контура ![]() и внутреннего контура
и внутреннего контура ![]() .
.
Передаточная функция САР по управляющему воздействию

Передаточная
функция замкнутой САР для выходной
координаты ![]()
![]()
Принимая
![]() (при аппроксимации внутреннего контура),
получим
(при аппроксимации внутреннего контура),
получим
![]() (30)
(30)
т.е. контур имеет оптимальную передаточную функцию.
В соответствии с передаточной функцией имеем
![]()
Отсюда для переходной функции можно записать
![]()
где
![]() производная
по времени переходной функции
производная
по времени переходной функции ![]() .
.
Таким образом,
![]() (31)
(31)
Для выходной координаты внутреннего контура
![]()
Поэтому
переходная функция для выходной
координаты ![]() будет
иметь вид
будет
иметь вид
![]() (32)
(32)
Из
полученных кривых переходных процессов
видно, что при настройке по симметричному
оптимуму возникает большая величина
перерегулирования выходной координаты
![]() ,
которая составляет
,
которая составляет ![]() .
Кроме того, возрастает и значение
.
Кроме того, возрастает и значение ![]() .
Для снижения перерегулирования на входе
системы со стороны задающего воздействия
устанавливается дополнительный фильтр
с передаточной функцией
.
Для снижения перерегулирования на входе
системы со стороны задающего воздействия
устанавливается дополнительный фильтр
с передаточной функцией
![]() .
.
В
этом случае для замкнутой системы при
управляющем воздействии ![]() будем иметь
будем иметь
![]()
т.е. передаточная функция будет оптимальной.
Для этого случая переходные функции реакции на задающее воздействие также будут отрицательными:
![]() (33)
(33)
![]() (34)
(34)
Анализ
кривых показывает, что дополнительный
фильтр влияет только на свойства САР
при управляющем воздействии и не влияет
на реакцию системы при возмущающем
воздействии. Перерегулирование выходной
координаты ![]() снижается до 8,1 %, снижается также
максимальное значение выходной величины
внутреннего контура. Однако при этом
возрастает время переходного процесса.
снижается до 8,1 %, снижается также
максимальное значение выходной величины
внутреннего контура. Однако при этом
возрастает время переходного процесса.
4.2 Реакция астатической сар на возмущающее воздействие
Структурные
схемы САР по возмущающему воздействию
для выходных координат ![]() и
и ![]() представлены на рис.14. В соответствии
с этими схемами передаточные функции
системы при возмущающем воздействии
определяются:
представлены на рис.14. В соответствии
с этими схемами передаточные функции
системы при возмущающем воздействии
определяются:
Для
выходной координаты ![]() :
:
![]()

![]() (35)
(35)
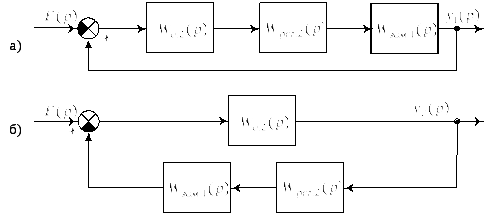
Рис. 14 Структурные схемы при регулировании по возмущающему воздействию:
а
- для выходной координаты ![]() ;
;
б
- для выходной координаты ![]() .
.
Следовательно, передаточная функция аналогична передаточной функции САР по управляющему воздействию для выходной величины внешнего контура.
Переходная функция в этом случае определяется
![]() (36)
(36)
Для
выходной координаты ![]() :
:
![]()
![]()
 (37)
(37)
Переходная функция внешнего контура при возмущающем воздействии
![]() (38)
(38)
Однако,
переходная функция для выходной
координаты определяется при одновременном
приложении к системе управляющего
воздействия ![]() .
Поэтому в соответствии с принципом
наложения получим
.
Поэтому в соответствии с принципом
наложения получим
![]() (39)
(39)
Переходный процесс для выходной координаты астатической САР при возмущении представлен на рис. 15.

Рис. 15 Переходные процессы систем при возмущающем воздействии
Анализ
кривых переходного процесса показывает,
что исследуемая система является
астатической, т.к. при приложении
возмущения статическая ошибка равна 0
- ![]() .
Это объясняется тем, что при наличии
ПИ-регулятора во внешнем контуре при
появлении ошибки будет изменяться
выходной сигнал регулятора до тех пор,
пока статическая ошибка регулирования
не станет равной нулю. Однако во время
переходного процесса появляется
динамическая ошибка
.
Это объясняется тем, что при наличии
ПИ-регулятора во внешнем контуре при
появлении ошибки будет изменяться
выходной сигнал регулятора до тех пор,
пока статическая ошибка регулирования
не станет равной нулю. Однако во время
переходного процесса появляется
динамическая ошибка ![]() Кроме
того, при настройке по симметричному
оптимуму возникает перерегулирование
выходной координаты
Кроме
того, при настройке по симметричному
оптимуму возникает перерегулирование
выходной координаты ![]() при возмущающем воздействии и выходной
координаты
при возмущающем воздействии и выходной
координаты ![]() при управляющем воздействии.
при управляющем воздействии.
2) Связи между прямыми показателями качества и частотными характеристиками
По виду ЛАЧХ и ЛФЧХ можно судить:
1) Система устойчива, если при частоте среза ЛФЧХ меньше 180˚, запас по фазе больше нуля;
2) Время регулирования системы обратно пропорционально частоте среза
![]() ;
;
3) Система устойчива, если запас по амплитуде больше нуля, при частоте достижения ЛФЧХ значения 180˚;
4) Если при частоте среза наклон ЛАЧХ больше - 20 дБ/дек, то система устойчивая;
5) Для устойчивости необходим диапазон с наклоном - 20 дБ/дек не менее одной декады;
6) По низкочастотной части ЛАЧХ можно судить о статизме системы. Если наклон 0 дБ/дек, то система статическая, если - 20 дБ/дек, то система первого порядка статизма, а если - 40 дБ/дек - второго порядка статизма.
Вывод
В ходе анализа систем регулирования было отмечено следующее:
Простота расчёта и настройки регуляторов.
Данные системы позволяют получить оптимальные показатели переходных процессов с минимальным перерегулированием в статических системах и с нулевой статической ошибкой в астатических системах.
Из-за особенностей строения системы быстродействие каждого внешнего контура ниже быстродействия соответствующего внутреннего контура.
Любое
отклонение от оптимальной настройки
(т.е. изменение либо постоянной времени
![]() ,
либо постоянной времени обратной связи
,
либо постоянной времени обратной связи
![]() )
приводит либо к увеличению перерегулирования
)
приводит либо к увеличению перерегулирования
![]() ,
либо увеличению времени переходного
процесса
,
либо увеличению времени переходного
процесса![]() (снижению быстродействия).
(снижению быстродействия).
Эти особенности систем регулирования привели к тому, что такие системы получили широкое применение во всех отраслях, особенно в автоматизированном электроприводе.