

2.1 Составление схемы оптимальной двухконтурной сар
Система
подчинённого регулирования состоит их
ОР (рис.1, рис.2) и регулирующей части САР
строится в виде контуров регулирования,
начиная от первого внутреннего контура.
Каждый контур регулирования включает
в себя регулятор и отдельные звенья
объекта с двумя большими постоянными
времени и одной малой некомпенсируемой
постоянной времени. На входе первого
регулятора установлен фильтр (звено с
малой постоянной времени ![]() ,
что обеспечивает помехозащищённость
системы, а значит её работоспособность).
Данная схема приведена на рис.3.
,
что обеспечивает помехозащищённость
системы, а значит её работоспособность).
Данная схема приведена на рис.3.
На рис.3 используются следующие обозначения:
![]() передаточные функции регуляторов для
первого и второго контуров соответственно.
передаточные функции регуляторов для
первого и второго контуров соответственно.
![]() заданные
значения выходных координат.
заданные
значения выходных координат.
Регуляторы в данной схеме выполняют две важные функции:
регулируют
одну выходную координату контура,
например ![]() ,
в соответствии с её заданным значением
,
в соответствии с её заданным значением
![]()
компенсирует одну большую постоянную времени (два регулятора компенсируют две больших постоянных времени).
На вход регулятора, как следует из выше сказанного, подаётся два сигнала: действительное значение регулируемой координаты и её заданное значение.
Передаточные функции регуляторов выбираются из расчёта, чтобы обеспечить оптимальность контура регулирования и получалась оптимальная передаточная функция.
Данный принцип позволяет не только последовательно регулировать координаты ОР, но и компенсировать инерционности этого объекта, т.е. осуществление коррекции САР, получившее название "последовательной коррекции".
Проектируемая
САР должна быть статической по возмущающему
воздействию и астатической - по
управляющему воздействию. Для таких
систем требуется оптимальная настройка
по модульному оптимуму. Поэтому они
называются однократно-интегрирующими
системами с последовательной коррекцией.
ОР содержит две большие постоянные
времени ![]() и одну малую, так называемую некомпенсируемую
времени
и одну малую, так называемую некомпенсируемую
времени ![]() .
Основополагающим принципом построения
систем подчиненного регулирования
является компенсация каждой большой
постоянной времени соответствующим
регулятором. Но при этом обязательным
условием служит присутствие в каждом
контуре двух звеньев ОР с большой и
малой постоянными времени. На основании
этих принципов можно построить схему,
изображённую на рис.3.
.
Основополагающим принципом построения
систем подчиненного регулирования
является компенсация каждой большой
постоянной времени соответствующим
регулятором. Но при этом обязательным
условием служит присутствие в каждом
контуре двух звеньев ОР с большой и
малой постоянными времени. На основании
этих принципов можно построить схему,
изображённую на рис.3.

Рис. 3 Структурная схема оптимальной двухконтурной САР
Как видно из схемы, что к данной САР приложены следующие внешние воздействия:
а)
![]() управляющее
воздействие
управляющее
воздействие
б)
![]() внешнее
возмущающее воздействие
внешнее
возмущающее воздействие
А регулируемыми выходными координатами соответственно являются
![]() выходная
регулируемая координата первого
внутреннего контура
выходная
регулируемая координата первого
внутреннего контура
![]() выходная
регулируемая координата второго внешнего
контура
выходная
регулируемая координата второго внешнего
контура
И
соответствующие этим выходным координатам
заданные значения выходных координат
![]() и
и ![]()
2.2 Структурная схема внутреннего контура регулирования сар Определение передаточной функции регулятора внутреннего контура
Система
подчинённого регулирования, состоящая
из ОР и регулирующей части САР строится
в виде контуров регулирования, начиная
от внутреннего первого контура. На
выходе первого регулятора обычно
устанавливается фильтр (или звенья с
малой и некомпенсируемой постоянной
времени ![]() ,
которая обеспечивает помехозащищённость
системы, т. е её работоспособность). При
больших значениях постоянной времени
она может существенно влиять на
быстродействие системы регулирования.
Следовательно для осуществления
абсолютной компенсации постоянной
времени и превращения инерционного
звена в усилительное, необходимо
последовательно с объектом включить
регулятор с передаточной функцией
дифференцирующего звена
,
которая обеспечивает помехозащищённость
системы, т. е её работоспособность). При
больших значениях постоянной времени
она может существенно влиять на
быстродействие системы регулирования.
Следовательно для осуществления
абсолютной компенсации постоянной
времени и превращения инерционного
звена в усилительное, необходимо
последовательно с объектом включить
регулятор с передаточной функцией
дифференцирующего звена
![]() (1)
(1)
где
![]() коэффициент
усиления и постоянная времени регулятора,
причём
коэффициент
усиления и постоянная времени регулятора,
причём ![]()
![]() (2)
(2)
Соответственно
![]() передаточная
функция апериодического звена
передаточная
функция апериодического звена
![]() (3)
(3)
При абсолютной компенсации постоянных времени контур регулирования становится весьма чувствительна к помехам
Степень приближения компенсации к абсолютной ограничивается пределом, при котором полоса пропускания замкнутого контура обеспечивается его помехозащищённости. Поэтому применяют ПИ-регуляторы с передаточной функцией
![]() (4)
(4)
![]() и
и
![]() большие
постоянные времени регулятора
большие
постоянные времени регулятора
![]() (5)
(5)
При замыкании данного контура единичной обратной связью получаем следующее выражение
На рис.4 приведена следующая схема внутреннего контура исследуемой САР
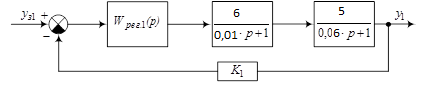
Рис. 4 Внутренний контур регулирования САР
В данной схеме передаточная функция регулятора может быть найдена по следующей формуле
![]() (6)
(6)
где
![]() постоянная
времени обратной связи регулятора
постоянная
времени обратной связи регулятора
![]() постоянная
времени интегрирования регулятора
постоянная
времени интегрирования регулятора
![]() передаточная
функция той части объекта, которая
компенсируется регулятором первого
контура
передаточная
функция той части объекта, которая
компенсируется регулятором первого
контура
![]() коэффициент
обратной связи внутреннего контура
регулирования (в данной работе
коэффициент
обратной связи внутреннего контура
регулирования (в данной работе![]() )
)
Учитывая вышеуказанные выражения в итоге получим следующую формулу
![]() (7)
(7)
Получили регулятор с пропорционально-интегральной характеристикой. Теперь составим функцию разомкнутого контура:
![]() (8)
(8)
и соответственно
 (9)
(9)
где
![]()
![]()