

2.3 Передаточные функции внутреннего оптимального замкнутого и разомкнутого контуров сар
![]()
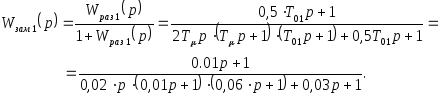
Передаточная функция разомкнутой САР будет иметь следующий вид:
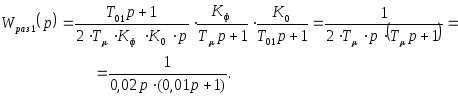
Тогда передаточная функция замкнутой системы с единичной отрицательной обратной связью будет определяться следующим выражением:
![]()
![]()
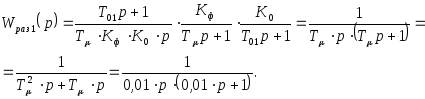
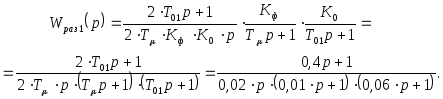
Тогда передаточная функция замкнутой системы с единичной связью будет определяться следующим образом:
![]()
![]()

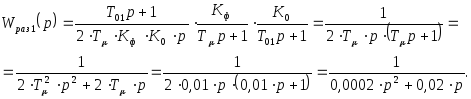
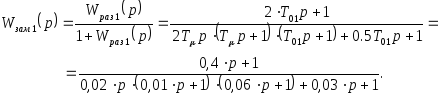
Тогда передаточная функция замкнутой системы с единичной отрицательной обратной связью определится следующим образом:
![]()
Определение
передаточной функции разомкнутой и
замкнутой САР при изменении значения
постоянной времени ![]()
![]()
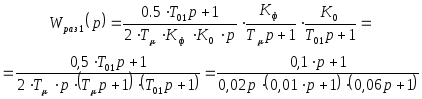
Тогда передаточная функция замкнутой САР при единичной отрицательной обратной связи равно будет определяться следующим выражением:
![]()
![]()
Тогда передаточная функция замкнутой САР будет определяться следующим выражением:
![]()
Аналогично двум другим случаям, передаточная функция замкнутого контура САР определится следующим выражением:
2.4 Аналитический расчёт графиков переходных процессов оптимального внутреннего замкнутого контура
Полученное
выражение свидетельствует о соответствии
передаточной функций разомкнутого и
замкнутого контуров оптимальной САР
второго порядка, другими словами
внутренний контр оптимизирован по
модульному оптимуму. Поэтому переходная
функция ![]() станет оптимальной и будет определяться
выражением:
станет оптимальной и будет определяться
выражением:
![]() (10)
(10)
Переходные функции оптимальной САР зависят от порядка и номера контура регулирования ОР
В
данном случае ![]()
Характеристическое уравнение
![]() ;
(11)
;
(11)
или
![]() ,
где
,
где
![]()
Корни характеристического уравнения
![]()
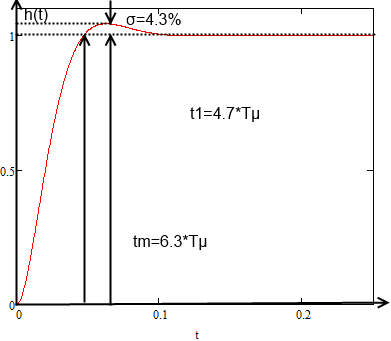
Рис. 5 Кривая переходного процесса по модульному оптимуму
Переходная функция характеризуется следующими показателями
Перерегулирование

Время
первого достижения установившегося
значения ![]() .
.
Время
первого достижения максимального
значения ![]() .
.
Время
переходного процесса (вхождения в 2-х
процентную зону) ![]()
Таким
образом, передаточные функции разомкнутого
и замкнутого контуров соответствуют
оптимальной системе второго порядка,
т.е. внутренний контур регулирования
двухконтурной САР оптимизирован по
модульному оптимуму. Поэтому переходная
функция ![]() станет
оптимальной и будет определяться
выражением (10). Такая переходная функция
представлена на рис.5.
станет
оптимальной и будет определяться
выражением (10). Такая переходная функция
представлена на рис.5.
Параметры переходного процесса также оптимальны. Они получены при оптимальной настройке регулятора, при которой
![]()
где
![]() постоянная
времени обратной связи регулятора
постоянная
времени обратной связи регулятора
![]() постоянная
времени интегрирования регулятора
постоянная
времени интегрирования регулятора
![]() оптимальное
значение коэффициента, определяющего
соотношение постоянных времени замкнутого
контура.
оптимальное
значение коэффициента, определяющего
соотношение постоянных времени замкнутого
контура.
На
динамические показатели замкнутого
внутреннего контура оказывает влияние
действительная настройка регулятора,
а именно, выбор значений постоянных
времени регулятора ![]() и
и ![]() .
Динамически показатели САР в этом случае
могут быть оценены по частотным методам
оценки качества САР. Для этого необходимо
построить логарифмические амплитудную
.
Динамически показатели САР в этом случае
могут быть оценены по частотным методам
оценки качества САР. Для этого необходимо
построить логарифмические амплитудную
![]() и
фазовую
и
фазовую ![]() частотные
характеристики САР с использованием
передаточных функций разомкнутой и
замкнутой САР.
частотные
характеристики САР с использованием
передаточных функций разомкнутой и
замкнутой САР.
Наиболее точно динамические показатели могут быть определены путём расчёта переходных процессов по методу структурного моделирования на ЭВМ. При этом желательно исследовать следующие варианты настройки параметров регулятора:
а)
изменение постоянной времени интегрирования
![]() регулятора:
регулятора:
1)
![]()
![]() базовый
вариант оптимальной настройки;
базовый
вариант оптимальной настройки;
2)
![]()
![]()
3)
![]()
![]()
б)
изменение постоянной времени обратной
связи ![]() регулятора:
регулятора:
1)
![]()
![]() базовый
вариант оптимальной настройки;
базовый
вариант оптимальной настройки;
2)
![]()
![]()
3)
![]()
![]()
Для построения переходных процессов можно воспользоваться приложением MATLAB Simulink, для этого на рис.6 приведём схему для построения соответствующих кривых переходных процессов.
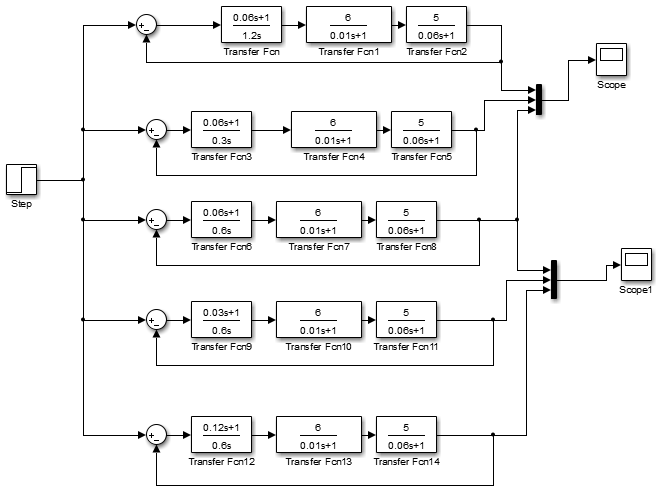
Рис. 6 Схема ОР для исследования кривых переходных процессов
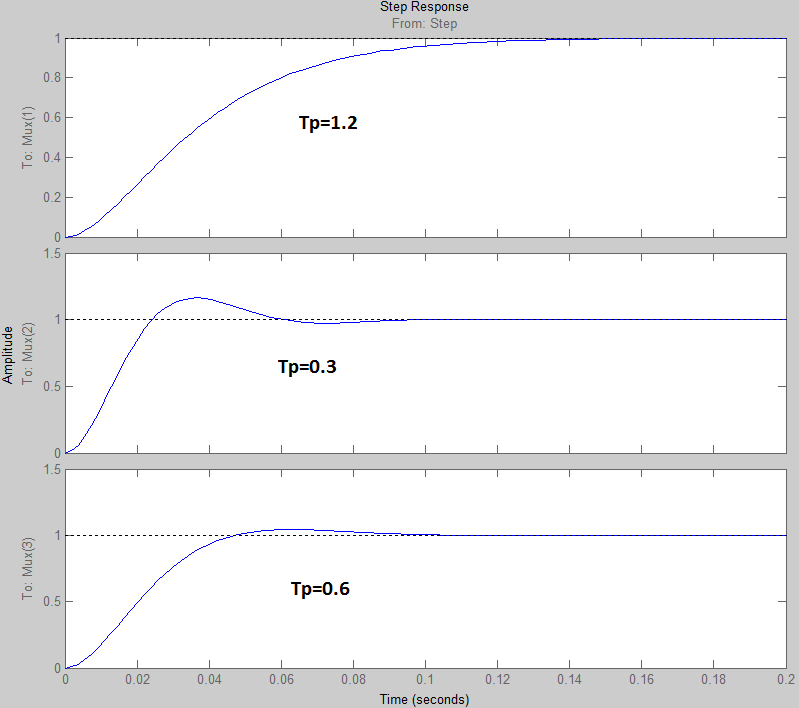
а)
б)
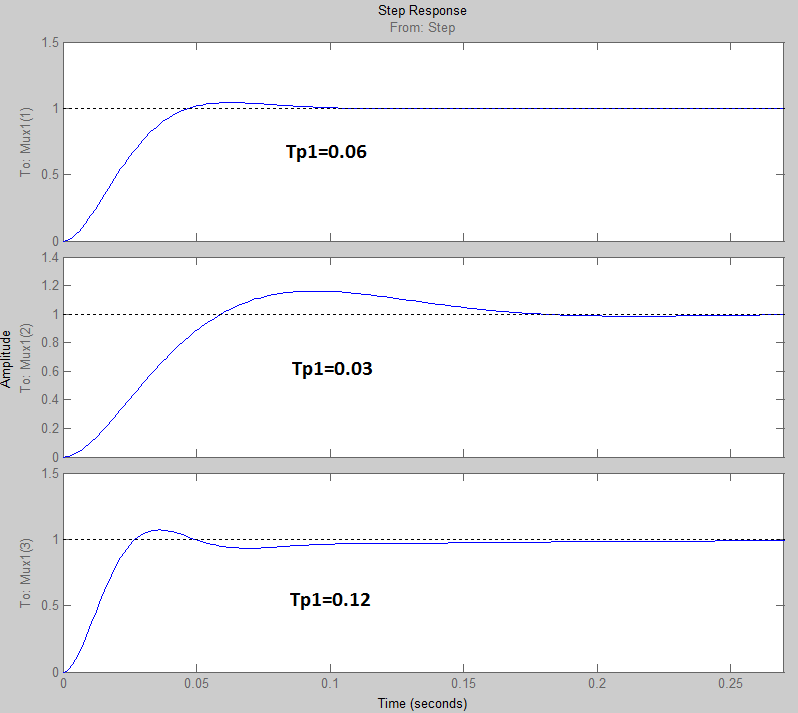
Рис. 6 Кривые переходных процессов:
а)
- при изменении ![]() б) - при изменении
б) - при изменении ![]()
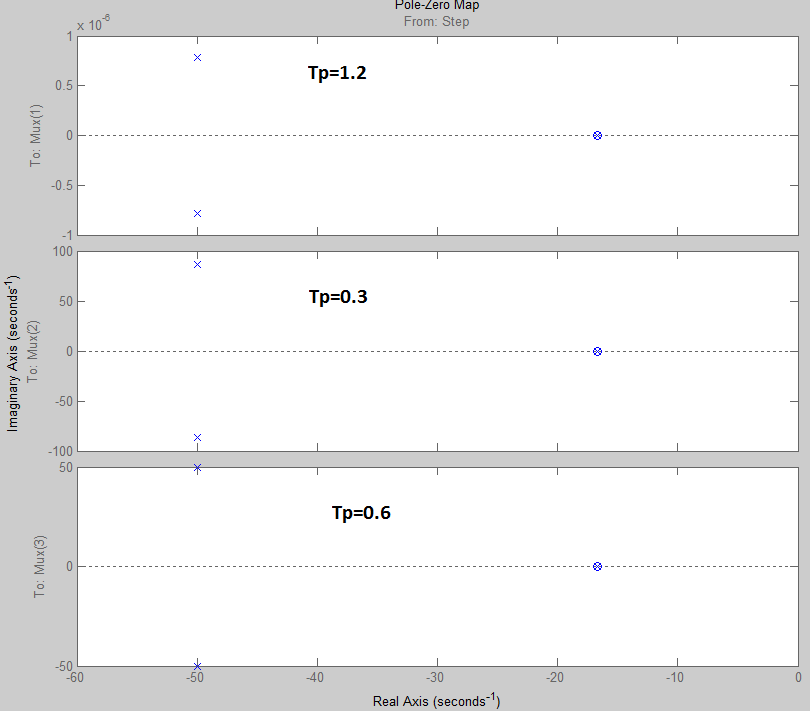
а)
б)
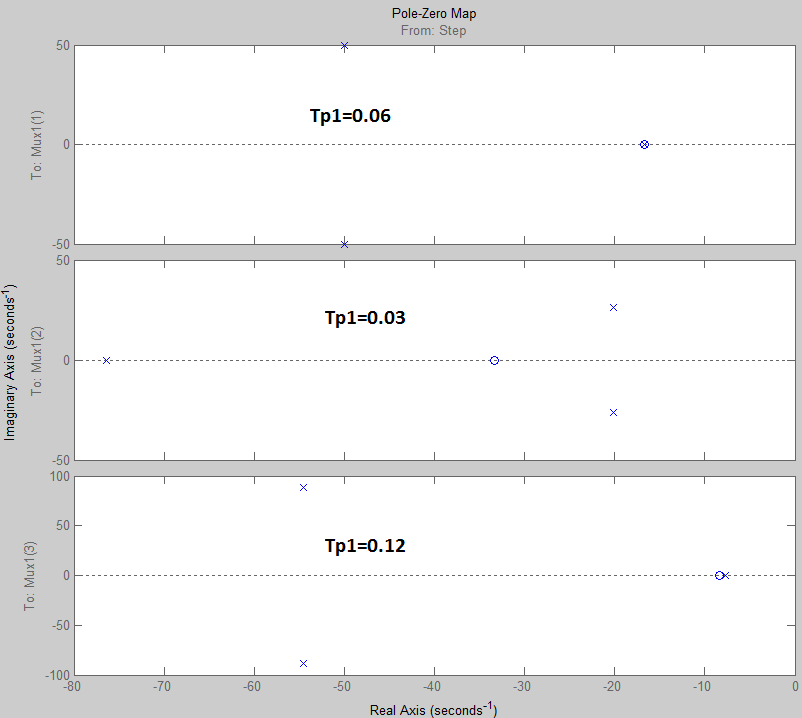
Рис. 7 Распределение нулей и полюсов
а)
- при изменении ![]() б) - при изменении
б) - при изменении ![]()
Вывод: Итак, анализируя переходные процессы, представленные на рис.6 а, б можно установить, что:
1)
При изменении ![]() :
:
1.1)
При уменьшении постоянной времени ![]() (коэффициента а,
а значит значения
(коэффициента а,
а значит значения ![]() )
снижается время переходного процесса
)
снижается время переходного процесса
![]() (другими словами, увеличивается
быстродействие), но возрастает
перерегулирование
(другими словами, увеличивается
быстродействие), но возрастает
перерегулирование ![]()
1.2)
При снижении постоянной времени ![]() ,
наоборот снижается перерегулирование,
но снижается быстродействие
,
наоборот снижается перерегулирование,
но снижается быстродействие ![]() (время переходного процесса увеличивается).
(время переходного процесса увеличивается).
2)
При изменении ![]()
2.1)
При уменьшении постоянной времени
обратной связи
![]() происходит
увеличение
происходит
увеличение ![]() и уменьшению
и уменьшению ![]() (т.е. увеличение быстродействия)
(т.е. увеличение быстродействия)
2.2)
При увеличении ![]() также
происходит увеличение
также
происходит увеличение ![]() ,
но в большей степени по отношению к
оптимальной настройке, однако происходит
увеличение
,
но в большей степени по отношению к
оптимальной настройке, однако происходит
увеличение ![]() (т.е. снижение быстродействия).
(т.е. снижение быстродействия).
Теперь
можно сделать вывод, что любое отклонение
от оптимальной настройки (т.е. изменение
либо постоянной времени ![]() ,
либо постоянной времени обратной связи
,
либо постоянной времени обратной связи
![]() )
приводит либо к увеличению перерегулирования
)
приводит либо к увеличению перерегулирования
![]() ,
либо увеличению времени переходного
процесса
,
либо увеличению времени переходного
процесса ![]() (снижению быстродействия). Поэтому
напрашивается вывод о том, что оптимальные
настройки являются наиболее благоприятными
для переходного процесса и облегчают
процесс регулирования объектом.
(снижению быстродействия). Поэтому
напрашивается вывод о том, что оптимальные
настройки являются наиболее благоприятными
для переходного процесса и облегчают
процесс регулирования объектом.