

2. Расчет и исследование внутреннего контура статической сар
Система
подчинённого регулирования, состоящая
из ОР и регулирующей части САР, строится
в виде контуров регулирования, начиная
от внутреннего первого контура. На
выходе первого регулятора обычно
устанавливается фильтр (или звенья с
малой и некомпенсируемой постоянной
времени
 ,
которая обеспечивает помехозащищённость
системы, т.е. её работоспособность). При
больших значениях постоянной времени
она может существенно влиять на
быстродействие системы регулирования.
Следовательно, для осуществления
абсолютной компенсации постоянной
времени и превращения инерционного
звена в усилительное, необходимо
последовательно с объектом включить
регулятор с передаточной функцией
дифференцирующего звена
,
которая обеспечивает помехозащищённость
системы, т.е. её работоспособность). При
больших значениях постоянной времени
она может существенно влиять на
быстродействие системы регулирования.
Следовательно, для осуществления
абсолютной компенсации постоянной
времени и превращения инерционного
звена в усилительное, необходимо
последовательно с объектом включить
регулятор с передаточной функцией
дифференцирующего звена

где
 коэффициент
усиления и постоянная времени регулятора,
причём
коэффициент
усиления и постоянная времени регулятора,
причём
 .
.

Соответственно
 передаточная
функция апериодического звена
передаточная
функция апериодического звена

При абсолютной компенсации постоянных времени контур регулирования становится весьма чувствительна к помехам
Степень приближения компенсации к абсолютной ограничивается пределом, при котором полоса пропускания замкнутого контура обеспечивается его помехозащищённости. Поэтому применяют ПИ-регуляторы с передаточной функцией

 и
и
 большие постоянные времени регулятора
большие постоянные времени регулятора

При замыкании данного контура единичной обратной связью получаем следующее выражение
Структурная схема внутреннего контура регулирования представлена на рисунок 3.
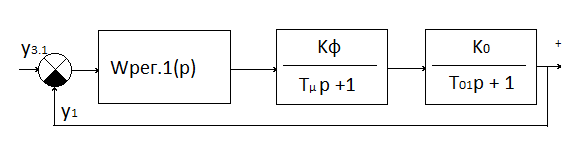
Рисунок 3 – Структурная схема внутреннего контура двухконтурной статической САР.
Передаточная функция регулятора внутреннего контура регулирования может быть найдена по общей формуле:

где
 – постоянная времени обратной связи
регулятора;
– постоянная времени обратной связи
регулятора;
 –
постоянная времени
интегрирования регулятора;
–
постоянная времени
интегрирования регулятора;
 передаточная то части
объекта регулирования, которая
компенсируется регулятором первого
контура;
передаточная то части
объекта регулирования, которая
компенсируется регулятором первого
контура;
 – коэффициент обратной
связи внутреннего контура регулирования
(
– коэффициент обратной
связи внутреннего контура регулирования
( .
.
Таким
образом для регулятора имеем следующую
передаточную функцию:

Подбираем регулятор внутреннего контура двухконтурной статической САР для нашего варианта:
|
|
|


Регулятор имеет пропорционально-интегральную характеристику.
Передаточная функция разомкнутого внутреннего контура:


Следовательно,
в разомкнутом внутреннем контуре имеется
интегрирующее звено. Наличие такого
звена в контуре регулирования приводит
к тому, что в установившемся режиме
(статике) отсутствует ошибка регулирования
выходной величины
 в соответствии с
заданным значением
в соответствии с
заданным значением
 .
.
Передаточная функция замкнутого внутреннего контура:

где
 – эквивалентная
постоянная времени внутреннего контура;
– эквивалентная
постоянная времени внутреннего контура;
 0.707
– коэффициент
демпфирования контура.
0.707
– коэффициент
демпфирования контура.
Таким образом, передаточные функции разомкнутого и замкнутого контуров соответствуют оптимальной системе второго порядка:

Т.е.
внутренний контур оптимизирован по
модульному оптимуму, поэтому переходная
функция
 станет оптимальной и будет определяться
выражением:
станет оптимальной и будет определяться
выражением:

Таблица
2.1 Данные
для построения кривой переходного
процесса h2(t).
Данные
для построения кривой переходного
процесса h2(t).
|
t |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
|
h2(t) |
0 |
0,49163 |
0,93319 |
1,04224 |
1,02583 |
|
t |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
h2(t) |
1,00455 |
0,99831 |
0,99871 |
0,99972 |
1,00006 |
|
t |
1 |
1,1 |
1,2 |
1,3 |
1,4 |
|
h2(t) |
1 |
1 |
1 |
1 |
1 |

Рисунок 4 – График кривой переходного процесса h2(t).
Переходная функция характеризуется следующими показателями:
-
Перерегулирование

-
Время первого достижения установившегося значения
 .
. -
Время первого достижения максимального значения
 .
. -
Время переходного процесса (вхождения в 2-х процентную зону)

Параметры переходного процесса также оптимальны. Они получены при оптимальной настройке регулятора, при которой

где
 – постоянная времени обратной связи
регулятора;
– постоянная времени обратной связи
регулятора;
 – постоянная времени
интегрирования регулятора;
– постоянная времени
интегрирования регулятора;
 – оптимальное значение
коэффициента, определяющего соотношение
постоянных времени замкнутого контура.
– оптимальное значение
коэффициента, определяющего соотношение
постоянных времени замкнутого контура.
На динамические показатели замкнутого
внутреннего контура оказывает влияние
действительная настройка регулятора,
а именно, выбор значений постоянных
времени регулятора
 и
и
 .
.
Динамические показатели САР в этом случае могут быть оценены по частотным методам оценки качества САР. Для этого необходимо построить логарифмические амплитудную L(ω)и фазовую φ(ω) частотные характеристики САР с использованием передаточных функций разомкнутой и замкнутой САР.
Наиболее точно динамические показатели могут быть определены путем расчета переходных процессов по методу структурного моделирования на ЦВМ.


Рисунок
5 – Схема и кривые переходных процессов
при изменении
 .
.
На
рисунке 5 представлены кривые переходных
процессов, полученные при разных
значениях постоянной времени интегрирования
регулятора ( .
Кривая 2 является базовым вариантом
оптимальной настройки (
.
Кривая 2 является базовым вариантом
оптимальной настройки ( )
, кривая 1 – вариант с уменьшенным вдвое
значением коэффициента a,
определяющего соотношение постоянных
времени замкнутого контура (
)
, кривая 1 – вариант с уменьшенным вдвое
значением коэффициента a,
определяющего соотношение постоянных
времени замкнутого контура ( ),
кривая 3 – вариант с увеличенным вдвое
значением коэффициента a,
определяющего соотношение постоянных
времени замкнутого контура (
),
кривая 3 – вариант с увеличенным вдвое
значением коэффициента a,
определяющего соотношение постоянных
времени замкнутого контура ( ).
По полученным кривым мы можем сделать
вывод, как влияет значение коэффициента
).
По полученным кривым мы можем сделать
вывод, как влияет значение коэффициента
 на переходные процессы:
на переходные процессы:
-
При уменьшении постоянной времени
 (коэффициента a) снижается время
переходного процесса, но увеличивается
перерегулирование за счёт увеличения
времени переходного процесса.
(коэффициента a) снижается время
переходного процесса, но увеличивается
перерегулирование за счёт увеличения
времени переходного процесса. -
При возрастании величины
 (коэффициента a) снижается перерегулирование
за счёт увеличения времени переходного
процесса.
(коэффициента a) снижается перерегулирование
за счёт увеличения времени переходного
процесса.


Рисунок
6 – Схема и кривые переходных процессов
при изменении
 .
.
На
рисунке 6 представлены кривые переходных
процессов, полученные при разных
значениях постоянной времени обратной
связи регулятора
 .
Кривая 2 является базовым вариантом
настройки регулятора (
.
Кривая 2 является базовым вариантом
настройки регулятора ( ,
кривая 1 – вариант с уменьшенным вдвое
значением постоянной времени обратной
связи регулятора (
,
кривая 1 – вариант с уменьшенным вдвое
значением постоянной времени обратной
связи регулятора ( ,
кривая 3 – вариант с увеличенным вдвое
значением постоянной времени обратной
связи регулятора (
,
кривая 3 – вариант с увеличенным вдвое
значением постоянной времени обратной
связи регулятора ( .
По полученным кривым мы можем сделать
вывод, как влияет значение коэффициента
.
По полученным кривым мы можем сделать
вывод, как влияет значение коэффициента
 на переходные процессы:
на переходные процессы:
-
Изменение постоянной времени
 в сторону уменьшения или увеличения
по сравнению с оптимальным значением
в сторону уменьшения или увеличения
по сравнению с оптимальным значением
 приводит к увеличению перерегулирования
при уменьшении времени переходного
процесса в первом случае и увеличении
его во втором случае.
приводит к увеличению перерегулирования
при уменьшении времени переходного
процесса в первом случае и увеличении
его во втором случае.
Исходя
из рисунка 4 и рисунка 5, можно сделать
общий вывод, что оптимальный переходный
процесс обеспечивается только при
оптимальной настройке регулятора, то
есть при
 и a=2
(вторая кривая на обоих рисунках).
и a=2
(вторая кривая на обоих рисунках).
По кривым переходных процессов также могут быть определены показатели качества САР. Для этой цели могут быть использованы логарифмические амплитудная L(ω)и фазовая φ(ω) частотные характеристики САР, построенные на основе передаточных функций разомкнутой и замкнутой систем для указанных вариантов изменения параметров регулятора.

Рисунок
7 – ЛАЧХ и ЛФЧХ внутреннего разомкнутого
контура при изменении
 .
.

Рисунок
8 – ЛАЧХ и ЛФЧХ внутреннего разомкнутого
контура при изменении
 .
.
По полученным характеристикам ЛАЧХ и ЛФЧХ мы можем определить запас устойчивости системы по фазе и по амплитуде.
Запас по фазе показывает, какое критическое значение фазового сдвига допустимо для САР. В случае превышения значения данного сдвига САР становится неустойчивой. Запас по фазе есть расстояние от кривой ЛФЧХ до –π. Исходя из полученных характеристик, запас по фазе для наших переходных процессов будет равен:
Δφ1= 56о
Δφ2= 66о
Δφ3= 56о
Запас по амплитуде показывает критическое значение коэффициента усиления, при котором САР остается в состоянии устойчивости. Запас по амплитуде есть расстояние от кривой ЛАЧХ до нуля при условии, что φ(ω) = - π/2. Исходя из полученных характеристик, запас по амплитуде для наших переходных процессов будет равен:
ΔL1= -4.67 dB
ΔL2= -8.96 dB
ΔL3= -10.8 dB
По полученным нами значениям запасов по устойчивости можно сделать вывод:
-
С увеличением значения постоянной времени
 запас по фазе уменьшается, а запас по
амплитуде увеличивается, и наоборот.
запас по фазе уменьшается, а запас по
амплитуде увеличивается, и наоборот.
Тот же самый анализ можно провести и с
ЛАЧХ и ЛФЧХ разомкнутой системы, изменяя
постоянную времени

Δφ1= 56о
Δφ2= 66о
Δφ3= 56о
ΔL1= -4.67 dB
ΔL2= -8.96 dB
ΔL3= -10.8 dB
По полученным нами значениям запасов по устойчивости можно сделать вывод:
-
С увеличением значения постоянной времени
 запас по фазе увеличивается, а запас
по амплитуде уменьшается, и наоборот.
запас по фазе увеличивается, а запас
по амплитуде уменьшается, и наоборот.
При оптимальной настройке регулятора внутреннего контура мы имеем следующие запасы устойчивости:

Следует отметить, что по разомкнутому внутреннему контуру мы можем определять запасы устойчивости и для замкнутого внутреннего контура, так как они остаются неизменными.