

3. Составление принципиальной электрической схемы цифровой системы управления приводом робота.
Состояние конечных переключателей S1, S2, S3, S4, S5 преобразуется в потенциальные сигналы X1, X2, X3, X4, X5 с помощью схемы, показанной на рис.2.

Рис.2 Схема включения
На основании Y1 и Y3 при прямом движении и Y2 при обратном, составим электрическую принципиальную схему:
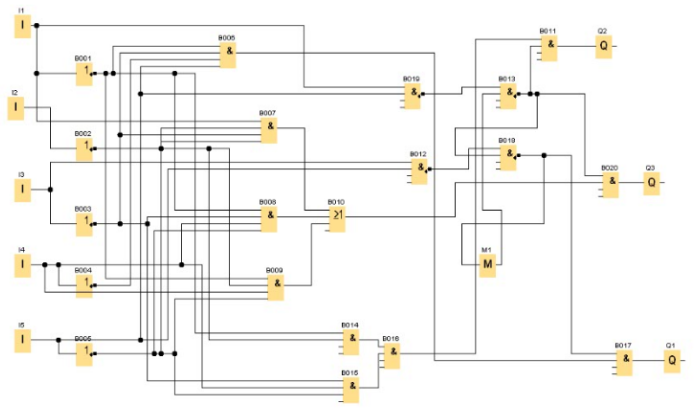

 Рис.3
Принципиальная электрическая схема
цифровой СУ
Рис.3
Принципиальная электрическая схема
цифровой СУ
4. Описание микропроцессорной системы управления приводом робота.
В качестве логической схемы, реализующей полученные выше структурные формулы системы управления, можно использовать и микропроцессор. Микропроцессор оперирует с машинным словом в виде двоичного числа (кода) определенной разрядности. Значение двоичного разряда числа представляется при этом электрическим напряжением высокого (1) и низкого (0) уровня. Наиболее распространенные микропроцессоры имеют длину машинного слова в восемь бит (1 байт). Будем рассматривать входные сигналы системы управления X1, Х2, Х3, Х4, Х5 как некоторый двоичный код и припишем логические значения этих сигналов битам машинного слова (В- обозначение бита):
|
Бит машинного слова |
А7 |
А6 |
А5 |
А4 |
А3 |
А2 |
А1 |
А0 |
|
Содержание бита |
0 |
0 |
0 |
Х5 |
Х4 |
Х3 |
Х2 |
Х1 |
Аналогично в виде двоичного кода можно представить и выходные сигналы системы управления:
|
Бит машинного слова |
В7 |
В6 |
В5 |
В4 |
В3 |
В2 |
В1 |
В0 |
|
Содержание бита |
0 |
0 |
0 |
0 |
0 |
Y3 |
У2 |
У1 |

Запись единицы в бите означает активный уровень соответствующего входного или выходного сигнала, запись нуля – отсутствие активного уровня сигнала. Двоичный код входных сигналов будем хранить в регистре ввода микропроцессора, а двоичный код выходных сигналов - в регистре вывода.
Для обеспечения универсальности систем управления, с целью реализации различных траекторий движения схвата можно использовать микропроцессорную систему управления, в которой изменение траектории движения робота осуществляется программным путем в виде набора программ, хранящихся в памяти МПУ.

Рис. 4. Структурная схема микропроцессорной
системы управления
Система управления на основе комплекта К580 строится по модульному принципу, который обеспечивает подключение к единой магистрали модулей ЦП (центрального процессора), ЗУ (запоминающего устройства) и УВВ (устройства ввода-вывода).
Система управления состоит из:
-
Микропроцессора КР580ВМ80 (DD3), являющегося аналогом микропроцессора i8080 фирмы Intel.
-
Тактового генератора К580ГФ24 (DD1), предназначен для синхронизации микропроцессорной системы и вырабатывает тактовые импульсы частотой 2 МГц для синхронизации МП, а также других схем (в последнем случае используются тактовые импульсы ТТЛ уровней). Одновременно эта микросхема обеспечивает формирование некоторых управляющих сигналов (например, сигнал сброса R).
-
Системного контроллера КР580ВК28 (DD2), предназначенного для фиксации слова-состояния МП, выработки системных управляющих сигналов, буферизации шины данных МП и управления направлением передачи по шине данных.
-
 Микросхемы
постоянной памяти ПЗУ К155РЕ21 (DD4)
для хранения управляющей программы.
Микросхемы
постоянной памяти ПЗУ К155РЕ21 (DD4)
для хранения управляющей программы. -
Микросхемы оперативной памяти ОЗУ К565РУ5 (DD5) для хранения данных, используемых при работе управляющей программы.
-
 Программируемого
контроллера порта ввода-вывода К580ВВ55,
работающего в режиме 0 (как 4 порта
ввода-вывода), причем используемый порт
С(3:0) является портом ввода, к которому
подсоединены преобразованные схемой
(см. рис. 2) сигналы X1…X5,
а порт С(7:4) является портом вывода, к
которому подключены усилители сигналов
Y1,
Y2
и Y3
для управления электропневмоклапанами
ЗП и ЗР.
Программируемого
контроллера порта ввода-вывода К580ВВ55,
работающего в режиме 0 (как 4 порта
ввода-вывода), причем используемый порт
С(3:0) является портом ввода, к которому
подсоединены преобразованные схемой
(см. рис. 2) сигналы X1…X5,
а порт С(7:4) является портом вывода, к
которому подключены усилители сигналов
Y1,
Y2
и Y3
для управления электропневмоклапанами
ЗП и ЗР. -
Двух регистров (DD7, 8) КР580ИР82 с приёмом информации параллельным кодом. Эти регистры предназначены для приёма, хранения и выдачи кода одного n-раздельного слова.
Составим алгоритм управления приводом робота для микропроцессорной системы:


Вывод:
В данной работе я спроектировал систему управления приводом промышленного робота и разработал электрическую принципиальную схему:
 1.
цифровой СУ на элементах жесткой логики
серии К555,
1.
цифровой СУ на элементах жесткой логики
серии К555,
2. микропроцессорной СУ на основе восьмиразрядной МикроЭВМ с микропроцессорным контроллером КР580ВМ80 (аналог микропроцессора i8080 фирмы Intel)
3. построила принципиальную схему управления приводом робота.