

Задание на курсовую работу
Задание на автоматизацию – Разработка цифровой и микропроцессорной систем управления промышленным роботом.
Исходные данные:
-
Маршрут движения схвата робота:
-
Серия интегральных микросхем для цифровой системы управления – 555.
-
Тип микропроцессорного контроллера – К580.

Рис.1. Принципиальная схема управления роботом
1. Описание принципиальной схемы управления приводом робота.
Схема управления приводом робота содержит следующие основные элементы: ЦП – пневмоцилиндр, обеспечивает вертикальное перемещение руки робота. Пневмоцилиндр управляется от двухпозиционного распределителя ЗП с электромагнитным управлением. Горизонтальное движение руки имеет привод от пневмоцилиндра ЦР, управляемого трехпозиционным распределителем ЗР с электромагнитным управлением. Конечные выключатели S1, S2, S3, S4, S5 являются датчиками сигналов обратной связи. Конечное положение органов определяется упорами, не показанными на схеме. Таким образом, состояние привода в каждый момент времени определяется комбинацией сигналов, поступающих от конечных выключателей S1…S5 и включением/выключением управляющих электромагнитов К1, K2 и К3.
Сигналы X1…X5 подаются на вход системы управления СУ. В зависимости от значения входных сигналов Xi и требуемой последовательности перемещения схвата робота, система управления СУ вырабатывает сигналы управления Y1, Y2 и Y3 распределителями K1, К2 и K3.
В
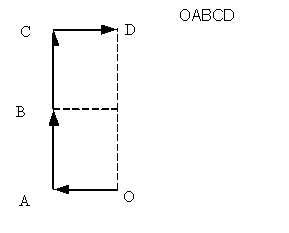
данной работе требуется обеспечить
движение схвата робота по контуру OABCD.
Для обеспечения требуемого маршрута
необходимо установить двухпозиционный
и трехпозиционный электропневмораспределители.
Движение робота осуществляется по
маршруту, начиная с точки О и проходя
через точки A,
B
и С заканчивает свой  маршрут
в точке D.
маршрут
в точке D.
2. Составление алгоритма управления роботом.
Граф функционирования привода робота будет иметь вид:
![]()
Применительно к системе управления этот граф можно переписать следующим образом:
![]()
На основе графика функционирования составим таблицу истинности:
|
Точка, отрезок |
Входы |
Выходы |
||||||
|
X1 |
X2 |
X3 |
X4 |
X5 |
Y1 |
Y2 |
Y3 |
|
На основе графика функционирования составим таблицу истинности:
|
Точка, отрезок |
Входы |
Выходы |
||||||||
|
X1 |
X2 |
X3 |
X4 |
X5 |
Y1 |
Y2 |
Y3 |
|||
|
O |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
||
|
OA |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
||
|
A |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
||
|
AB |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
||
|
B |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
1 |
||
|
BC |
0 |
0 |
0 |
1 |
0 |
1 |
1 |
1 |
||
|
C |
0 |
0 |
1 |
1 |
1 |
0 |
0 |
1 |
||
|
CD |
1 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
||
|
D |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
0 |
||
|
DB. |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
||
|
B. |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
||
|
B.0 |
0 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
||
|
0 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
||

Составим ДНФ (дизьюнктивнонормальную функцию) для функций Y1 ,Y2 и Y3.
![]()
Обратное
![]()
![]()
Проведем минимизацию полученной ДНФ:
![]()
![]()
![]()