

Основные параметры переходной функции:
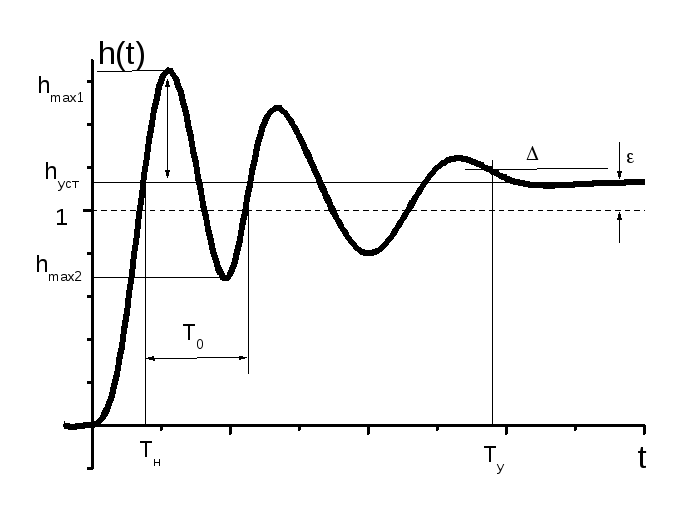
Рис. 2.8. Переходная характеристика САУ.
-
статическое отклонение (статическая ошибка) ε = 1(t) – hуст. Она характеризует разность между входным и выходным сигналами в установившемся режиме. Системы, у которых статическое отклонение не равно нулю (ε <> 0) называются статическими. Системы, у которых ε = 0, называются астатическими.
-
Динамическое отклонение, т.е. разность между максимальным отклонением и установившемся значением hmax – hуст.
-
Время регулирования (управления) Tу – это время переходного процесса. Это время, после которого разность между текущим значение выходного сигнала и установившимся значением будет иметь малую величину Δ. Как правило, Δ принимают равным 5% от hуст.
![]()
Время регулирования характеризует быстродействие системы автоматического управления. Чем меньше Tу, тем выше быстродействие.
-
Перерегулирование σ, %. Определяется выражением:
![]()
(В реальных системах перерегулирование обычно составляет 10 – 30%).
-
Частота колебаний процесса ω = 2π/T0, где T0 – период колебаний.
-
Время нарастания (установления) Tн – время, за которое система достигает установившегося значения.
-
Логарифмический декремент затухания, определяется по формуле:
![]()
-
Число колебаний n – число максимумов h(t) на промежутке от 0 до Tу.
Функции 1(t) и δ(t) можно использовать для экспериментального определения передаточной функции элемента системы управления:
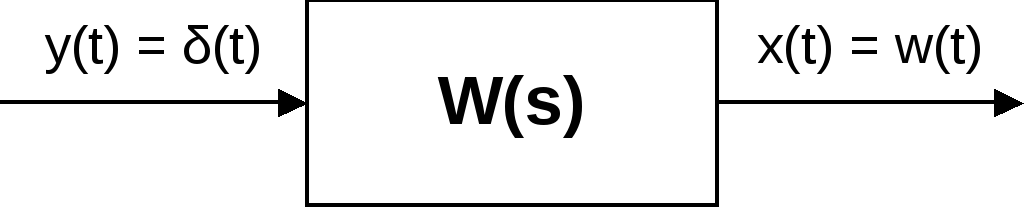
Первый подход: подадим на вход *(t). Пусть *(t) ≈ (t) (т.к. (t) физически не реализуема), измерим w*(t) ≈ w(t). Теперь можно вычислить L[w*(t)] = W*(s) ≈ W(s).
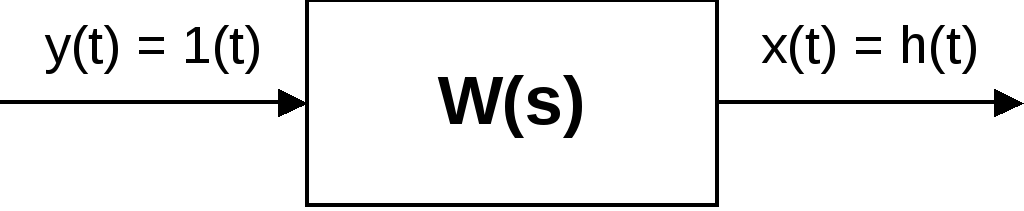
Второй подход: На вход подаем 1(t). Измеряем h(t) и вычисляем передаточную функцию. W(s) = L[d/dt(h(t)].