

ГОСы - УИТС - Теория, шпоры, вопросы, ответы / ТАУ / 16
.doc16. Задачи и методы синтеза лмнейных САУ.
Задачи синтеза. Задачи синтеза САУ заключаются в определении управляющего устройства в виде его математического описания. При этом считается, что задан объект управления, известны требования к точности и качество управления, известны условия работы, включая характеристики внешних воздействий, известны требования к надёжности, весу, габаритам и т.д. Синтез-создание управляющего устройства при известном условии. Задача синтеза - задача на оптимум. Требуется создать устройство, к-ое наилучшим бы образом удовлетворяла бы заданным требованиям. Большое число требований и их разнообразие даёт возможность сформировать единый критерий оптимальности и решения задачи синтеза, как задачу надёжности этого экстремума. Поэтому синтез разделяется на ряд этапов и на каждом этапе решается какая то часть задач синтеза(один отдельный аспект).
Частотный метод синтеза корректирующих устройств. Наиболее распространённым является частотный метод синтеза корректирующих устройств с помощью ЛЧХ. Он проводится следующим образом: Строится желаемая ЛАЧХ исходя из требованиям по точности и качества переходного процесса. Эта желаемая характеристика сравнивается с той, которую имеет система без коррекции. В результате сравнения определяется передаточная функция корректирующего устройства. Затем строится ФЧХ и с помощью её определяется полученные запасы устойчивости по амплитуде и фазе.
Формирование НЧ желаемой ЛАЧХ. Требования по точности могут формироваться по разному.
1.Пусть даны рабочая частота и амплитуда (р и ар) и задана допустимая ошибка А = доп.
Для области низких частот, где W(j) >1
можно записать: Ф(jp)=1/1+W(jp)1/W(jp)
А=aW(j)= a/1+W(jp)a/W(jp)
W(jp) ар/доп


3. Для астатических систем задается скорость изменения вх сигнала
![]()
![]()
Если воздействие задано, как изменение с постоянной скоростью, то пользуются коэффициентами:

к - коэффициент передачи на рабочей частоте
В это случае АЧХ должна проходить выше точки 20lgk
Формирование СЧ желаемой ЛАЧХ.
СЧ – часть формируется исходя из требований к качеству перех проц-ов.
П
 усть
заданно допустимость перерегулирования
и время процесса tп.
Чтобы по этим данным определить частоту
среза, используем график:
усть
заданно допустимость перерегулирования
и время процесса tп.
Чтобы по этим данным определить частоту
среза, используем график:
 При
=20%
tp
=
с
= после этого их сопрягают.
При
=20%
tp
=
с
= после этого их сопрягают.
С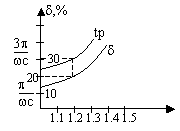 Ч
и НЧ части сопрягаем асимптотами с
наклоном –40 и –60 дБ/дек
Ч
и НЧ части сопрягаем асимптотами с
наклоном –40 и –60 дБ/дек
Высокочастотная часть ЛАЧХ заметной роли на качество не играет, поэтому
мы берём её такой же как у неизменяемой части.
Сущ-ет синтез последовательного и параллельного корректирующих устройств
Они взаимозаменяемы, поэтому рассмотрим только последовательные.
![]()
Считаем, что заданная ЧХ отличается от желаемой надо пред-ть коэф-т передачи и перед ф-ию КУ, к-ые обеспечили бы желаемые св-ва сис-мы.

Пусть кж>к0
![]()
Расстояние между W/o и Wo – 20 lgkk – коэф-т усиления КУ
![]()
чтобы найти Wk совмещают на одном графике ЧХ для Wж и для W/o


Общий порядок поэтапного синтеза линейной САУ.
1 этап. Определение порядка астатизма и коэффициента передачи системы, Эти параметры находятся исходя из требований к точности в установленном режиме при детерминированном воздействии. Если коэффициент передачи системы, который определяется по величине астатизма оказывается очень большим, что затрудняет стабилизацию системы, целесообразно повысить порядок астатизма и тем самым свести статическую ошибку к нулю, в независимости от коэффициента передачи системы. Если ввели астатизм, то в этом случае коэффициент передачи системы выбирается исходя только из соображений детальности и качества переходных процессов. На этом же этапе решается вопрос о применении воздействий по основному возмущению. Введение коррекции по возмущению целесообразно, если имеется возможность изменения этого возмущения, и введение коррекции по возмущению позволяющее упростить структуру замкнутого контура.
2 этап. Определение основного, т.е. не варьируемой части системы. При проектировании системы обычно часть звеньев системы оговаривают или определяют. Сюда относится объект управления и слежения с объектом устройства (исполнительный механизм, чувствительный элемент и т.д.).
Тем не менее эти звенья должны удовлетворять требованиям по точности и быстродействию. Часто при проектировании задаются другие звенья: преобразователи, усилители, вычислительные устройства. Набор известных элементов составляет костяк структурной схемы системы (иначе это называют основной или не варьируемой частью системы )
3 этап. Выбор коррекции и составление структурной части схемы САУ. Если требования к качеству переходных процессов и точности невысокие, то выбор корректирующих звеньев и варьируемых параметров осуществляется по условию обеспечения устойчивости системы и при этом стремятся к получению как можно больших запасов устойчивости. После выбора корректирующего устройства осуществляется выбор значения варьируемых параметров исходя из требований по точности и качества переходных процессов. Если же требования к качеству переходных процессов и точности достаточно высокие, то корректирующие устройства выбираются исходя из требований по качеству переходных процессов и точности. Корректирующие устройства выбираются таким образом, чтобы в первую очередь обеспечить те требования к качеству управления, которые наиболее жёсткие.
После того как выбрана коррекция предъявляется выполнение других требований к системе и при этом уточняется коррекция. Если мы применяем последовательную коррекцию, то найденная частотная характеристика и будет являться частотной характеристикой корректирующего устройства. По ней определяют передаточную функцию корректирующего устройства. Если предполагается применить корректирующую обратную связь, то её передаточную функцию находят по передаточной функции последовательного корректирующего устройства. Если одновременно используется последовательная и параллельная коррекция, то из передаточной функции варьируемой части сначала выделяется передаточная функция последовательного корректирующего устройства, а за тем оставшаяся часть корректируется как параллельное корректирующее устройство.
4 этап. Построение переходного процесса. Стремятся учесть все те упрощения, которые были сделаны на предыдущих этапах.