

1.3 Структурная схема и передаточная функция системы
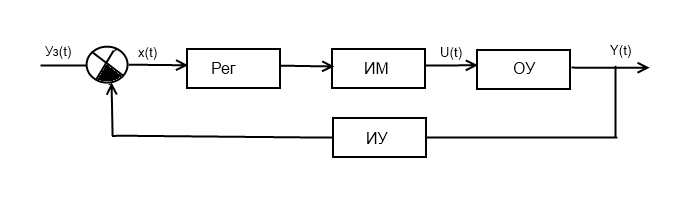
Рис 4. Функциональная схема системы автоматического управления
Рег – регулятор, ИМ – исполнительный механизм (насос), ОУ – объект управления (резервуар), ИУ – исполнительное устройство (датчик). Кругом на функциональной схеме изображена функция сравнения сигналов.
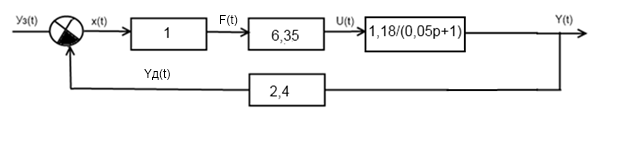
На основе функциональной блок-схемы (рис.4) и описание элементов передаточными функциями, составляем структурную схему исследуемой системы (рис 5), изменив условные обозначения звеньев на конкретные выражения их передаточных функций. По структурной схеме (рис 5) определяем передаточную функцию разомкнутой системы и передаточную функцию замкнутой системы.
 Рис
5. Структурная схема системы.
Рис
5. Структурная схема системы.
Преобразуем полученную структурную схему к замкнутой системе с единичной обратной связью с целью получения передаточной функции замкнутой системы. Для этого перенесем сравнивающий элемент с выхода датчика на вход, при этом необходимо между переносимым задающим воздействием и сравнивающим элементом добавить фиктивное звено с передаточной функцией, обратной передаточной функции исходного звена, находившегося в обратной связи.
Так как фиктивное звено ставим до сравнительного элемента, то оно не оказывает влияние на динамические свойства системы, поэтому в дальнейшем при описании системы можно его не учитывать. (рис 6).
 Рис.
6. Преобразованная структурная схема
системы.
Рис.
6. Преобразованная структурная схема
системы.
В соответствии с полученной структурной схемой, а так же правилами нахождения передаточной функции соединения звеньев, передаточная функция разомкнутой системы будет иметь вид [2]:
W(p)
=
 (4)
(4)
Подставив значения передаточных функций объекта управления, датчика и исполнительного механизма, Значение Wрег примем равное 1, так как в системе регулятор пока отсутствует, но будет добавлен в дальнейшем, получим передаточную функцию разомкнутой системы:
W(p)= =
= (5)
(5)
Передаточная функция замкнутой системы
Ф(р)= (6)
(6)
2. Анализ исследуемой системы
2.1. Исследование устойчивости
2.1.1. Алгебраический критерий устойчивости
При исследовании устойчивости системы с использованием алгебраического критерия устойчивости Гурвица рассматривается характеристический полином замкнутой системы. По Гурвицу для устойчивой системы должны соблюдаться два условия:
коэффициенты характеристического полинома должны быть положительны С0=0,05>0, C1=18.9832>0. Условие выполняется.
должны быть положительны определители составленные из этих коэффициентов:
для системы первого порядка ▲1=С0>0. Условие выполняется.
Оба условия выполняются, следовательно, система устойчива
2.1.2 Частотный критерий устойчивости
При исследовании устойчивости системы частотным методом используется частотный критерий устойчивости Найквиста применительно к логарифмическим частотным характеристикам системы. Для этого строятся асимптотические логарифмические характеристики разомкнутой системы. Исходным выражением является выражение (5) передаточной функции разомкнутой системы.
При построении асимптотической логарифмической характеристики определяются частоты сопряжения Wсопр=1/Т и ордината единичной частоты L(1)=20lgKсист.
Т.к. в системе имеется интегрирующее звено то через точку w=1 с ординатой L(1)=25,1 до частоты сопряжения проводится прямая с наклоном -20 децибел на декаду. После прохождения частоты сопряжения характеристика испытывает приращение наклона на -20 дб/дек для инерционного звена.
Для
построения логарифмической фазовой
характеристики находим выражение
фазового угла [1]:
 (6.1)
(6.1)
Значения точек приведены в таблице 4.
Таблица 4. Точки для построения ЛФХ
|
|
|
|
0 |
0 |
|
20 |
-45 |
|
∞ |
-90 |
|
1 |
-3 |
|
10 |
-26.6 |
|
100 |
-78.5 |


По логарифмическим характеристикам чертеж КР-2068.998-26-07-00.00.000.Д. лист1 частота среза системы Wc=400 получается меньше частоты фазового сдвига -180 Wп=∞, следовательно система устойчива.