

Тесты
.docТеория принятия решений.
-
Каноническая задача ЛП.
Каноническая форма задачи характеризуется тремя признаками:
1. Однородная система ограничений в виде системы уравнений;
2. Однородные условия неотрицательности, распространяющиеся на все переменные, участвующие в задаче;
3. Минимизация (максимизация) линейной функции
2. Критерий оптимальности симплекс-метода для решения задачи ЛП на максимум (минимум).
Для задачи на максимум (минимум) коэффициенты в целевой функции в симплекс-таблице неотрицательны (неположительны).
-
Критерий неограниченности целевой функции в симплекс-методе для решения задачи ЛП на максимум (минимум).
Для
задачи на максимум существует
![]() для которого
для которого
![]() ,
,
для
задачи на минимум существует
![]() для которого
для которого
![]() .
.
4. Содержательный смысл оптимального решения вспомогательной задачи в симплекс-методе.
Если оптимальное значение вспомогательной задачи больше нуля, то исходная задача не имеет решений, если оптимальное значение вспомогательной задачи равно нулю, то исходная задача записана в специальной форме с выделенным базисом .
5 .
Двойственная задача к задаче ЛП.
.
Двойственная задача к задаче ЛП.
6 .
Матричная игра, как пара двойственных
задач.
.
Матричная игра, как пара двойственных
задач.

7.Задача ЛП для первого игрока.

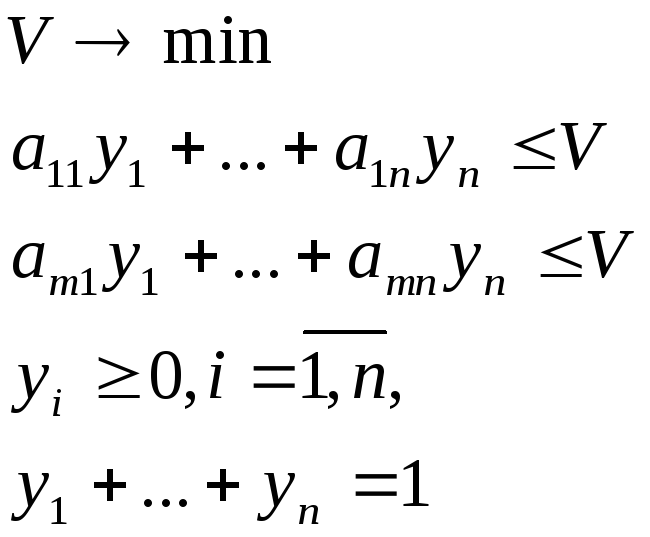
8.Задача ЛП для второго игрока.
9. Матричная игра «Производство - Рынок».

10. Функция выигрыша для матричной игры «Производство – Рынок».
![]()
1 1.
Задача о назначениях как задача ЛП.
1.
Задача о назначениях как задача ЛП.
12. Оценка числа итераций в задаче о назначениях.
Число
итераций меньше, либо равно
![]() ,
где
,
где
![]() -число работ.
-число работ.
13. Уравнение Беллмана.
Fk*(ξk1)=max(ƒk(uk)+Fk+1*(ξk))
14.Уравнение Беллмана для задачи с мультипликативным критерием.
Fk*(ξk1)=max (ƒk(uk)Fk+1*(ξk))
15.Уравнение Беллмана для задачи распределения ресурсов.
Fk*(ξk1)=max(ƒk(uk)+Fk+1*(ξk1-xk))
16.Уравнение Беллмана для задачи о замене оборудования.
φ(t)p+ƒ(0)-r(0)
- Fk+1(1)¸
если u=
«заменить»
Fk*(t
)=
{
ƒ(t)-
ƒ(t)-r(t)
- Fk+1(t+1)¸
если u=
«сохранить»

18. Выбор направления SK в методе покоординатного спуска.
Skє{±(0,...,l...)}
19. Нахождение шага αк в методе наискорейшего спуска.
ƒ(xk+αSk)=φ(α)
φ
(α)→
min
20. Выбор направления SK в методе сопряженных градиентов.
![]()
2![]() 1.
Каноническая задача для задачи выпуклого
программирования:
1.
Каноническая задача для задачи выпуклого
программирования:
![]()
![]()
![]()
![]()
2![]() 2.
Нахождение направления
2.
Нахождение направления
![]() в методе возможных направлений.
в методе возможных направлений.
![]()
![]()
![]()
![]()
2![]() 3.
Нахождение шага
3.
Нахождение шага
![]() в методе возможных направлений.
в методе возможных направлений.
![]()
![]()
24.
Последовательная оптимизация для
лексикографического подхода решения
задачи многокритериальной оптимизации
![]() .
.
Решаем последовательность задач:
1.![]()
![]()
2.
![]()
![]()
25.
Симметрическая задача ЛП
![]() .
.
