

Расчет сателлита
Из предыдущих расчетов мы имеем
TIII = 7,73106 Нмм ; n hg = 630 об/мин ; t h = 2000 ч ;
C =1 ; BT =4 ; HRC = 58-63 ,я принимаю HRC = 60 ;
HB = 600 ; IR = 0 ; марка стали 12Х2Н4А ;
вид термообработки - цементация
Теперь по схеме алгоритма определения допускаемых контактных напряжений мы рассчитываем их
H lim b =23HRC =2360= 1380 МПа
NНО = 12107 т. к HRC56
К НЕ =1т. к. IR=0
N НЕ =60n g hct hК не = 60630 1 2000 1=7,56107
т. к. N НЕ N НО ,то
![]()
S H =1,2- для поверхностного упрочнения
![]()
Окончательно имеем:
H lim b = 1380 МПа ; NНО = 12107 ; N НЕ =7,56107 ; К HL=1,08
S H =1,2 ; [ H ]=1242МПа
Теперь по схеме алгоритма расчета допускаемого напряжения изгиба:
Из предыдущих расчетов
TIII =7,73106 Нмм ; n h g= 630об/мин; t h = 2000 ч ;
C =1; BT =4 ; HRC = 58-63 ,я принимаю HRC = 60 ;
HB = 600 ; IR = 0 ; марка стали 12Х2Н4А ;
вид термообработки цементация
F lim b =800 МПа ;
m F = 9 т. к HB350
К FЕ =1 т. к. IR=0
N FЕ = 60 n hg ct hК FЕ = 60630112000 =7,56107
т. к. NFЕ 4 106,то К FL=1
К FC=1 ,т. к HB350 при реверсивном нагружении
S F =1,7
![]()
Окончательно имеем:
F lim b = 800 МПа ; NFЕ = 7,56107; К FC=1;К FL=1
S F =1,2 ; [ F ]=470,6 МПа ; К FЕ =1 ; m F = 9.
Расчет солнечного колеса
Из предыдущих расчетов мы имеем
TIII = 7,73106 Нмм ; n ha = 630об/мин ; t h = 2000 ч ;
C =5 ; BT =4 ; HRC = 58-63 ,я принимаю HRC = 60 ;
HB = 600 ; IR = 0 ; марка стали 12Х2Н4А ;
вид термообработки цементация
Теперь по схеме алгоритма определения допускаемых контактных напряжений мы рассчитываем их
H lim b =23HRC =2360= 1380 МПа
NНО = 12107 т. к HRC56
К НЕ =1 т. к.IR=0
N НЕ =60n ahct hК не = 60630 5 2000 1=37,8107
т. к. N НЕ N НО,то
![]() ,
,
S H =1,2 - для поверхностного упрочнения
![]() .
.
Окончательно имеем:
H lim b = 1380 МПа ; NНО = 12107 ; N НЕ =37,8107 ; К HL=1
S H =1,2 ; [ H ]=1150МПа
Теперь по схеме алгоритма расчета допускаемого напряжения изгиба:
Из предыдущих расчетов
TIII =7,73106 Нмм ; n h a= 630 об/мин; t h = 2000 ч ;
C =5; BT =4 ; HRC = 58-63 ,я принимаю HRC = 60 ;
HB = 600 ; IR = 0 ; марка стали 12Х2Н4А ;
вид термообработки - цементация
F lim b =800 МПа ;
m F = 9 т. к HB350
К FЕ =1
N FЕ = 60 n h a ct hК FЕ = 60630512000 =37,8107
т. к. NFЕ 4 106,то
К FL=1 ,
К FC= 1,
S F =1,7,
![]() .
.
Окончательно имеем :
F lim b = 800 МПа ; NFЕ =37,8107; К FC=1 ; К FL=1
S F =1,2 ; [ F ]a=470,6МПа ; К FЕ =1 ; m F = 9.
-
Определение основных габаритов передачи
Из предыдущих расчетов
Tag = 0,4356 106 Нмм ; nah = 630об/мин ; b a =0,4 ;
=0; [ H ]=1150 МПа ; Uagh=1,
К =1,1 ; К a = 49,5 ,т . к =0,

![]() ,
,
![]() ,
,
![]() .
.
Теперь по таблице значений коэффициентов динамической нагрузки,
найдем КV = 1,2 ,
![]() .
.
Теперь по таблице значений коэффициентов неравномерности распределения нагрузки, найдем
К =1,03,
К = КV К = 1,151,01 =1,16,
К К.
Принимаем
-
Определение модуля и чисел зубьев
Из предыдущих расчетов
TI =0,4356 106 Нмм
U = 1; [F] =470,6 МПа ; = 20 ; =0
Т. к вид термообработки цементация ,то по таблице m min = 2,5мм,
ZV =20 ; X =0 ; Y =1
![]() ,
,
YF = 4,08,
![]()
m m min
По ГОСТу принимаем m=2,5 мм,
![]() ,
,
Принимаем
Z = 75,
![]()
Принимаем Z1=38,
![]() .
.
Условие сборки
![]() целое число
целое число
![]() =целое
число ,т. е условие сборки выполняется
=целое
число ,т. е условие сборки выполняется
![]() .
.
-
Определение геометрических размеров передачи
Из предыдущих расчетов
m=2,5 ; Z1 =38 ; Z2 =37 ;U =1;![]() ; t =20
; t =20
![]() ,т.
е.
,т.
е.
![]()
X1 =0 ; X2 =0 ; X =0 ; Y =0 ; Y =0
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
Определяем и
![]()
![]() .
.
-
Проверочный расчет на контактную прочность
Исходные данные
Tag=0,4356106Нмм;b=40мм;[H]ag=1150МПа;U=1;nagh=630об/мин;d1=93,75;![]()
Заранее принимаем Z=1 т. к. передача прямозубая
![]() , при таком b d,
k=1,01,
, при таком b d,
k=1,01,
![]() .
.
При такой окружной скорости kv=1,15 тогда
k =k vk=1,011,15=1,16
Принимаем ZM=275мм,

Определяем действительное контактное напряжение в передаче:

![]() Тогда:
Тогда:

![]() Контактная
прочность обеспечена. Перегрузка 1.
Контактная
прочность обеспечена. Перегрузка 1.
-
Проверочный расчет на изгибную прочность
Рассмотрим напряжения изгиба в зубе.
Исходные данные:
T1=0,4356 106 Нмм; b=40 мм; Z1=38; U1=1; =0;
m=2,5;![]() мм;
k=1,16; [F]1=470,6
МПа
мм;
k=1,16; [F]1=470,6
МПа
![]() .
.
При таком ZV; YF=3,8; Y=1; YE=1, при =0.
Определим действительное напряжение изгиба в зубе солнечного колеса:
(F) a g=![]()
Тогда:
![]()
Изгибная прочность обеспечена. Недогрузка 12
Рассмотрим напряжения изгиба в зубе сателлита :
Исходные данные:
Tag=0,4356 106 Нмм; b=40 мм; Z2=37; U1=1; =0;
m=2,5;
![]() мм;
k=1,16; [F]ag
=470,6 МПа
мм;
k=1,16; [F]ag
=470,6 МПа
![]()
При таком ZV; YF=3,7; Y=1; YE=1, при =0.
Определим действительное напряжение изгиба в зубе шестерни:
(F)ag=![]()
Тогда:
![]()
Изгибная прочность колеса обеспечена. Недогрузка 7.
-
Определение ширины неподвижного колеса
Ширину неподвижного колеса определим из условия контактной прочности и из условия изгибной прочности.
а). Из условия контактной прочности :

где Tgb=0,782106 Нмм,
 ,
,
[H]gb = 1150 МПа .
Тогда
![]() мм,
мм,
б). Из условия изгибной прочности :
 =31м,
=31м,
где
![]()
YВ =Y =1 при =0
Из двух полученных значений , исходя из прочностных соображений , выбираем наибольшее ,т. е .
![]() .
.
-
Проектирование альтернативного варианта редуктора
Производя расчет альтернативного варианта редуктора мы вводили те же данные , что и в первом случае , только при расчете быстроходной цилиндрической передачи мы делаем передачу косозубой с углом =14, а при расчете планетарной передачи ba=0,5 .
Расчет альтернативного варианта редуктора произведен на машине .Результаты приведены в приложении.
Анализ результатов проектирования
Производя расчет альтернативного варианта редуктора мы вводили те же данные , что и в первом случае , только при расчете быстроходной цилиндрической передачи мы делаем передачу косозубой с углом =14, а при расчете планетарной передачи ba=0,5 . Первый редуктор предпочтительнее ,чем второй ,т. к. он более компактный и в дальнейшем мы будем рассчитывать его.
-
Оценка размеров диаметров валов
Исходные данные :
![]() ,
,
![]() ,
,
![]() .
.
Из условия прочности :
![]() .
.
Принимаем
[]1=50 МПа,
[]2=65МПа,
[]3=80 МПа,
1=0,8,
2=3=0,7,
Тогда
 ,
,
Принимаем d1=45мм,
 ,
,
Принимаем d2=60мм,
 ,
,
Принимаем d3=85мм,
Принимаем dg=35мм.
-
Предварительный подбор подшипников.
Входной вал вращается с большим числом оборотов(n1==2300 об/мин), передается небольшой крутящий момент (T1==0,73 кНм).
Зубчатые колеса прямозубые , поэтому на вал действует только радиальная сила . Поэтому поставим на входной вал шарикоподшипники средней серии №309 (d1=45мм , D1= 100мм).
Крутящий момент , передаваемый промежуточным валом (T2=1,98 Нмм) больше , чем на входном валу , а число оборотов в два раза меньше(n2=840 об/мин).Зубчатые колеса прямозубые ; на вал действует только радиальная сила .Поставим на промежуточный вал шарикоподшипники легкой серии №212 (d2=60мм , D1= 110мм).
Ось сателлита не передает крутящего момента , она обеспечивает свободное вращение сателлитов с невысоким числом оборотов (ngh=630 об/мин),т. к. сателлиты имеют прямые зубья ,то на подшипники действует только радиальная сила. Поэтому поставим на сателлит шарикоподшипники легкой серии №207 (d=60мм , D= 110мм).
Выходной вал вращается с небольшим числом оборотов(n3==210 об/мин) и передает большой крутящий момент(T3==7,73 кНм) на несущий винт вертолета. На выходной вал действует как радиальная , так и осевая силы . Поэтому поставим на выходной вал в распор два конических роликовых подшипника легкой серии №7217 (d=85мм , D= 150мм).
-
Расчет сил в зацеплении.
Определим силы в зацеплении быстроходной
ступени .Разложим усилие
![]() в
зацеплении на две составляющих:
окружную силу
в
зацеплении на две составляющих:
окружную силу
![]() и радиальную
и радиальную
![]() .
.
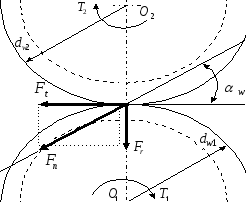
Рис. 2
Определим эти силы :
![]() кН ;
кН ;
![]() кН
кН
![]() кН
кН
Определим силы в зацеплении солнца с
сателлитом. Разложим усилие
![]()
в зацеплении на две составляющих
:окружную силу
![]() и радиальную
и радиальную
![]() .
.
Определим эти силы:
![]() кН
кН
![]() кН;
кН;
![]() кН.
кН.
-
Расчет валов.
-
Расчет входного вала.
-
Составим расчетную схему и построим эпюры изгибающих моментов и моментов кручения.
Реакции определяются находя сумму моментов относительно одной из опор ∑M=0.

Рис. 3
На входной вал установим два радиальных шариковых подшипника №309
Расчет подшипников см. таблицу 1,2
Расчет вала см. приложение 1.
-
Расчет промежуточного вала
Составим расчетную схему и построим эпюры изгибающих моментов и моментов кручения.
Реакции определяются находя сумму моментов относительно одной из опор ∑M=0.

Рис. 4
На промежуточный вал установим радиальный шариковый подшипник №212 и №214
Расчет подшипников см. таблицу 1. Расчет вала см. приложение 1
-
Расчет рессоры
На вал действует только крутящий момент Мкр=1,98кН∙м
Расчет вала см. приложение 1.
-
Расчет оси сателлита.
Составим расчетную схему и построим эпюры изгибающих моментов и моментов кручения.

Рис. 5
Реакции определяются находя сумму моментов относительно одной из опор ∑M=0.
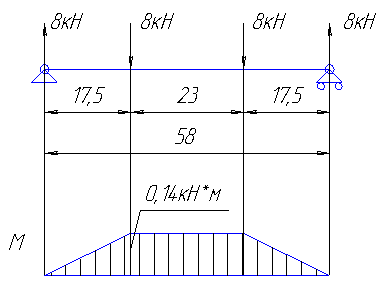
Рис. 6
На ось сателлита установим два радиальных шариковых подшипника №207
Расчет подшипников см. таблицу 1,2
Расчет вала см. приложение 1.
-
Расчет выходного вала.
Составим расчетную схему и построим эпюры изгибающих моментов и моментов кручения.
Реакции определяются находя сумму
моментов относительно одной из опор
∑M=0.

Рис. 7
На выходной вал установим два радиально-упорных конических роликовых подшипника №7217
Расчет подшипников см. таблицу 1,2
Расчет вала см. приложение 1.
-
Расчет валов.
Анализируя расчет валов, приведенный в приложениях, убеждаемся, что коэффициент запаса прочности всех валов больше минимально допустимой величины (n=1,8), все валы проходят по прочности (см. приложение 1).
-
Расчет подшипников
Эквивалентная динамическая нагрузка определяется по формуле:
![]()
где X – коэффициент радиальной нагрузки
Y - коэффициент осевой нагрузки
V – коэффициент вращения
Kб – коэффициент безопасности
KT – температурный коэффициент
Номинальная долговечность подшипника в рабочих часах:
![]()
где С - динамическая грузоподъемность
Kкач – коэффициент повышения грузоподъемности авиационных подшипников.
a23 – коэффициент качества металла и условий работы
m – показатель степени (для шариковых m=3, для роликовых m=10/3)
Т.к. вычисления производятся по одной формуле, то расчет рациональнее выполнить в электронной таблице EXCEL. Результат расчета приведен в таблице 1,2. Алгоритм расчета приведен в приложении 2.
Таблица 1
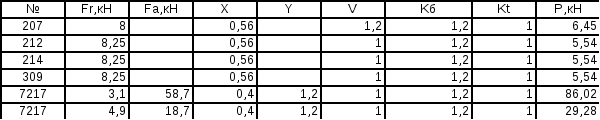
Таблица 2
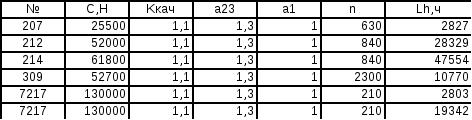
В результате расчета убеждаемся, что долговечность всех подшипников больше минимально допустимой величины (Lh=2000ч), все подшипники проходят по долговечности.