

1) электрическая цепь её элементы и параметры
Электрическая цепь - это совокупность устройств и объектов, образующих путь электрического тока. Отдельное устройство, входящее в состав электрической цепи и выполняющее в ней определенную функцию, называется элементом электрической цепи.
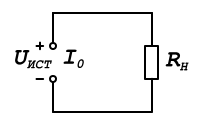
Электрическая цепь состоит из источника электрической энергии, потребителей и соединительных проводов, соединяющих источник электрической энергии с потребителем.
Основные элементы простейшей электрической цепи:
1 - источник электрической энергии; 2 - приемники электрической энергии; 3 - соединительные провода.
ОСНОВНЫЕ ПАРАМЕТРЫ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ
Напряжение (Э.Д.С.) источника электрической энергии – U ( B ).
Мощность источника электрической энергии – Р (Вт).
Сопротивление приемника электрической энергии – R (Ом).
Мощность приемника электрической энергии – P (Вт).
2) Измерительные трансформаторы
Измерительные трансформаторы тока и напряжения предназначены для уменьшения первичных токов и напряжений до значений, наиболее удобных для подключения измерительных приборов, реле защиты, устройств автоматики. Применение измерительных трансформаторов обеспечивает безопасность работающих, так как цепи высшего и низшего напряжения разделены, а также позволяет унифицировать конструкцию приборов и реле.
Технические характеристики трансформаторов тока
Номинальный первичный и вторичный ток трансформаторов тока
Трансформаторы тока характеризуются номинальным первичным током Iном1 (стандартная шкала номинальных первичных токов содержит значения от 1 до 40000 А) и номинальным вторичным током Iном2, который принят равным 5 или 1 А. Отношение номинального первичного к номинальному вторичному току представляет собой коэффициент трансформации КТА= Iном1/ Iном2
Токовая погрешность трансформаторов тока
Т![]() рансформаторы
тока характеризуются токовой погрешностью
∆I=(I2K-I1)*100/I1 (в процентах) и угловой
погрешностью (в минутах). В зависимости
от токовой погрешности измерительные
трансформаторы тока разделены на пять
классов точности: 0,2; 0,5; 1; 3; 10. Наименование
класса точности соответствует предельной
токовой погрешности трансформатора
тока при первичном токе, равном 1—1,2
номинального. Для лабораторных измерений
предназначены трансформаторы тока
класса точности 0,2, для присоединений
счетчиков электроэнергии — трансформаторы
тока класса 0,5, для присоединения щитовых
измерительных приборов -классов 1 и 3.
рансформаторы
тока характеризуются токовой погрешностью
∆I=(I2K-I1)*100/I1 (в процентах) и угловой
погрешностью (в минутах). В зависимости
от токовой погрешности измерительные
трансформаторы тока разделены на пять
классов точности: 0,2; 0,5; 1; 3; 10. Наименование
класса точности соответствует предельной
токовой погрешности трансформатора
тока при первичном токе, равном 1—1,2
номинального. Для лабораторных измерений
предназначены трансформаторы тока
класса точности 0,2, для присоединений
счетчиков электроэнергии — трансформаторы
тока класса 0,5, для присоединения щитовых
измерительных приборов -классов 1 и 3.
Нагрузка трансформаторов тока
Нагрузка трансформатора тока — это полное сопротивление внешней цепи Z2, выраженное в омах. Сопротивления r2 и х2 представляют собой сопротивление приборов, проводов и контактов. Нагрузку трансформатора можно также характеризовать кажущейся мощностью S2 В*А. Под номинальной нагрузкой трансформатора тока Z2ном понимают нагрузку, при которой погрешности не выходят за пределы, установленные для трансформаторов данного класса точности. Значение Z2ном дается в каталогах.
Электродинамическая стойкость трансформаторов тока
Электродинамическую стойкость трансформаторов тока характеризуют номинальным током динамической стойкости Iм.дин. или отношением kдин = Термическая стойкость определяется номинальным током термической стойкости Iт или отношением kт= Iт / I1ном и допустимым временем действия тока термической стойкости tт.

Конструкции трансформаторов тока
По конструкции различают трансформаторы тока катушечные, одновитковые (типа ТПОЛ), многовитковые с литой изоляцией (типа ТПЛ и ТЛМ). Трансформатор типа ТЛМ предназначен для КРУ и конструктивно совмещен с одним из штепсельных разъемов первичной цепи ячейки.
Для больших токов применяют трансформаторы типа ТШЛ и ТПШЛ, у которых роль первичной обмотки выполняет шина. Электродинамическая стойкость таких трансформаторов тока определяется стойкостью шины.
Для ОРУ выпускают трансформаторы типа ТФН в фарфоровом корпусе с бумажно-масляной изоляцией и каскадного типа ТРН. Для релейной защиты имеются специальные конструкции. На выводах масляных баковых выключателей и силовых трансформаторов напряжением 35 кВ и выше устанавливаются встроенные трансформаторы тока. Погрешность их при прочих равных условиях больше, чем у отдельно стоящих трансформаторов.
Технические характеристики измерительных трансформаторов напряжения
Номинальные первичное и вторичное напряжение измерительных трансформаторов напряжения
Трансформаторы напряжения характеризуются номинальными значениями первичного напряжения, вторичного напряжения (обычно 100 В или 100/ ), коэффициента трансформации К=U1ном/U2ном. В зависимости от погрешности различают следующие классы точности трансформаторов напряжения: 0,2;0,5; 1:3.
Нагрузка трансформаторов напряжения
Вторичная нагрузка трансформатора напряжения—это мощность внешней вторичной цепи. Под номинальной вторичной нагрузкой понимают наибольшую нагрузку, при которой погрешность не выходит за допустимые пределы, установленные для трансформаторов данного класса точности.
Конструкции трансформаторов напряжения
В установках напряжением до 18 кВ применяются трехфазные и однофазные трансформаторы, при более высоких напряжениях — только однофазные. При напряжениях до 20 кВ имеется большое число типов трансформаторов напряжения: сухие (НОС), масляные (НОМ, ЗНОМ. НТМИ, НТМК), с литой изоляцией (ЗНОЛ). Следует отличать однофазные двухобмоточные трансформаторы НОМ от однофазных трехобмоточных трансформаторов ЗНОМ. Трансформаторы типов ЗНОМ-15, -20 -24 и ЗНОЛ-06 устанавливаются в комплектных токопроводах мощных генераторов. В установках напряжением 110 кВ и выше применяют трансформаторы напряжения каскадного типа НКФ и емкостные делители напряжения НДЕ.

Схемы включения трансформаторов напряжения
В зависимости от назначения могут применяться разные схемы включения трансформаторов напряжения. Два однофазных трансформатора напряжения, соединенные в неполный треугольник, позволяют измерять два линейных напряжения. Целесообразна такая схема для подключения счетчиков и ваттметров. Для измерения линейных и фазных напряжений могут быть использованы три однофазных трансформатора (ЗНОМ, ЗНОЛ), соединенные по схеме «звезда — звезда», или трехфазный типа НТМИ. Так же соединяются в трехфазную группу однофазные трехобмоточные трансформаторы типа ЗНОМ и НКФ.
Присоединение расчетных счетчиков к трехфазным трансформаторам напряжения не рекомендуется, т.к. они имеют, обычно, несимметричную магнитную систему и увеличенную погрешность. Для этой цели желательно устанавливать группу из двух однофазных трансформаторов соединенных в неполный треугольник.
Трансформаторы напряжения выбирают по условиям Uуст ≤U1ном, S2≤ S2ном в намечаемом классе точности. За S2ном принимают мощность всех трех фаз однофазных трансформаторов напряжения, соединенных по схеме звезды, и удвоенную мощность однофазного трансформатора, включенного по, схеме неполного треугольника.
3) основные режимы работы электрических цепей
Режимы работы электрической цепи
Режим короткого замыкания ( КЗ )
В режиме короткого замыкания источник питания замкнут накоротко. Режим является аварийным. Ток короткого замыкания КЗ во много раз превышает значение номинального тока.
Rн = 0 I = max
Режим холостого хода ( ХХ )
В режиме холостого хода источник питания отсоединен от нагрузки и работает вхолостую. Сопротивление внешнего участка цепи и ток равен 0.
Rн = ∞
Режим согласованной нагрузки
Свойства электрической цепи – наибольшая мощность нагрузки развивается источником, когда сопротивление нагрузки ровно внутреннему сопротивлению источника.
Rн = I0
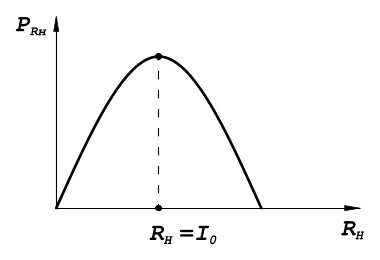
Из графика видно с ростом сопротивления нагрузки растёт мощность на нагрузке при Rн = I0мощность нагрузки наибольшая при дальнейшем росте Rн – PRн уменьшается.
Мощность электрического тока
P = UI
4) Устройство машины постоянного тока
Устройство статора.
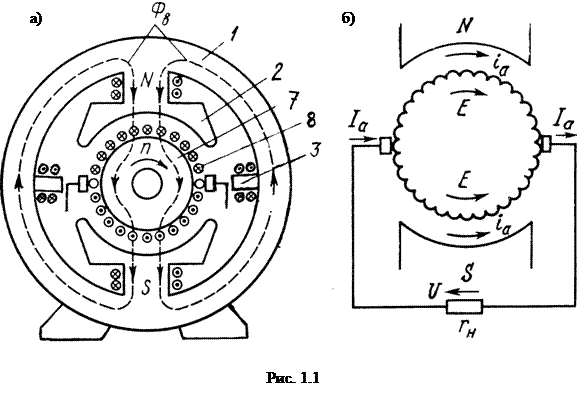
Машина постоянного тока состоит из двух основных частей: неподвижной – статора и вращающейся – ротора, называемого в машинах постоянного тока якорем. Эскиз машины постоянного тока показан на рис. 1.1, а общий вид с разрезом — на рис.
1.2. Статор состоит из станины 1, главных полюсов 2, дополнительных полюсов 3, подшипниковых щитов 4 и щеточной траверсы со щетками 6.
Станина имеет кольцевую форму и изготовляется из стального литья или стального листового проката. Она составляет основу всей машины и, кроме того, выполняет функцию магнитопровода.
Главные полюсы служат для создания постоянного во времени и неподвижного в пространстве магнитного поля. С этой целью по обмотке полюсов пропускается постоянный ток, называемый током возбуждения (в машинах малой мощности в качестве полюсов могут использоваться постоянные магниты).
Дополнительные
полюсы устанавливаются между главными
и служат для улучшения условий
коммутации.
 Подшипниковые
щиты закрывают статор с торцов. В
них впрессовываются подшипники и
укрепляется щеточная траверса, которая
с целью регулирования может поворачиваться.
На щеточной траверсе закреплены пальцы,
которые электрически изолированы от
траверсы. На пальцах установлены
щеткодержатели со щетками, изготовленными
из графита или смеси графита с медью.
Подшипниковые
щиты закрывают статор с торцов. В
них впрессовываются подшипники и
укрепляется щеточная траверса, которая
с целью регулирования может поворачиваться.
На щеточной траверсе закреплены пальцы,
которые электрически изолированы от
траверсы. На пальцах установлены
щеткодержатели со щетками, изготовленными
из графита или смеси графита с медью.
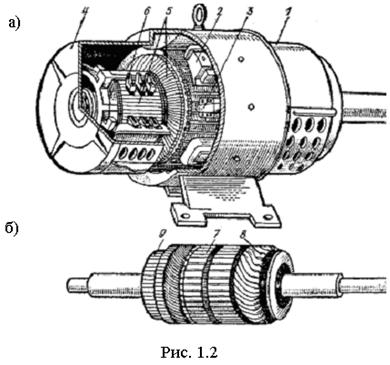
Устройство якоря.
Вращающаяся часть машин – якорь 9 (рис. 1.1, 1.2, а, б) состоит из сердечника 7, обмотки 8 и коллектора 5.
Сердечник имеет
цилиндрическую форму. Он набирается из
колец или сегментов листовой
электротехнической стали, на внешней
поверхности которых выштампованы
пазы. В пазы сердечника укладываются
секции из медного провода. Концы секций,
которые выводятся на коллектор и
припаиваются к его пластинам, образуют
замкнутую обмотку якоря.
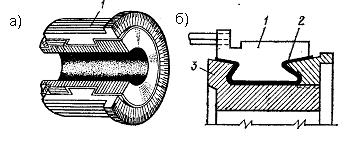
 Коллектор
(рис. 1.3) набран из медных пластин
клинообразной формы, изолированных
друг от друга, и корпуса 3миканитовыми
прокладками 2, образующими
в сборе цилиндр, который крепится на
валу якоря.
Коллектор
(рис. 1.3) набран из медных пластин
клинообразной формы, изолированных
друг от друга, и корпуса 3миканитовыми
прокладками 2, образующими
в сборе цилиндр, который крепится на
валу якоря.
5) Составные части электрической цепи и схемы. Законы Кирхгофа.
Электри́ческая цепь — совокупность устройств, элементов, предназначенных для протекания электрического тока, электромагнитные процессы в которых могут быть описаны с помощью понятий сила тока и напряжение.
Изображение электрической цепи с помощью условных знаков называют электрической схемой
Неразветвленные и разветвленные электрические цепи
Электрические цепи подразделяют на неразветвленные и разветвленные. На рисунке 1 представлена схема простейшей неразветвленной цепи. Во всех ее элементах течет один и тот же ток. Простейшая разветвленная цепь изображена на рисунке 2. В ней имеются три ветви и два узла. В каждой ветви течет свой ток. Ветвь можно определить как участок цепи, образованный последовательно соединенными элементами (через которые течет одинаковый ток) и заключенный между двумя узлами. В свою очередь узел есть точка цепи, в которой сходятся не менее трех ветвей. Если в месте пересечения двух линий на электрической схеме поставлена точка (рисунок 2), то в этом месте есть электрическое соединение двух линий, в противном случае его нет. Узел, в котором сходятся две ветви, одна из которых является продолжением другой, называют устранимым или вырожденным узлом.
Линейные и нелинейные электрические цепи
цепью называют такую цепь, все компоненты которой линейны. К линейным компонентам относятся зависимые и независимые идеализированные источники токов и напряжений, резисторы (подчиняющиеся закону Ома), и любые другие компоненты, описываемые линейными дифференциальными уравнениями, наиболее известны электрические конденсаторы и индуктивности. Если цепь содержит отличные от перечисленных компоненты, то она называется нелинейной.
Изображение электрической цепи с помощью условных обозначений называют электрической схемой. Функция зависимости тока, протекающего по двухполюсному компоненту от напряжения на этом компоненте называют вольт-амперной характеристикой (ВАХ). Часто ВАХ изображают графически в декартовых координатах. При этом по оси абсцисс на графике обычно откладывают напряжение, а по оси ординат — ток.
В частности, омические резисторы, ВАХ которых описывается линейной функцией и на графике ВАХ являются прямыми линиями, называют линейными.
Примерами линейных (как правило, в очень хорошем приближении) цепей являются цепи, содержащие только резисторы, конденсаторы и катушки индуктивности без ферромагнитных сердечников.
Некоторые нелинейные цепи можно приближенно описывать как линейные, если изменение приращений токов или напряжений на компоненте мало, при этом нелинейная ВАХ такого компонента заменяется линейной (касательной к ВАХ в рабочей точке). Этот подход называют "линеаризацией". При этом к цепи может быть применён мощный математический аппарат анализа линейных цепей. Примерами таких нелинейных цепей, анализируемых как линейные относятся практически любые электронные устройства, работающие в линейном режиме и содержащие нелинейные активные и пассивные компоненты (усилители, генераторы и др.).
Первое правило
Первое правило Кирхгофа гласит, что алгебраическая сумма токов в каждом узле любой цепи равна нулю. При этом направленный к узлу ток принято считать положительным, а направленный от узла — отрицательным: Алгебраическая сумма токов, направленных к узлу равна сумме направленных от узла.
Иными словами, сколько тока втекает в узел, столько из него и вытекает. Это правило следует из фундаментального закона сохранения заряда.
Второе правило
Второе правило Кирхгофа (правило напряжений Кирхгофа) гласит, что алгебраическая сумма падений напряжений на всех ветвях, принадлежащих любому замкнутому контуру цепи, равна алгебраической сумме ЭДС ветвей этого контура. Если в контуре нет источников ЭДС (идеализированных генераторов напряжения), то суммарное падение напряжений равно нулю:
для
постоянных напряжений 
для переменных напряжений
6) Принцип действия машины постоянного тока
Принцип действия машин постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2,направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
Е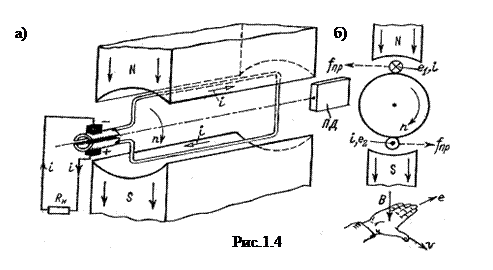 сли
внешняя цепь замкнута, то по ней потечет
ток, направленный от нижней щетки к
потребителю и от него – к верхней щетке.
Нижняя щетка оказывается положительным
выводом генератора, а верхняя –
отрицательным. При повороте витка на
180° проводники из зоны одного полюса
переходят в зону другого полюса и
направление ЭДС в них изменяется на
обратное. Одновременно верхняя
коллекторная пластина входит в контакт
с нижней щеткой, а нижняя – с верхней,
направление тока во внешней цепи не
изменяется. Таким образом, коллекторные
пластины не только обеспечивают
соединение вращающего витка с внешней
цепью, но и выполняют роль переключающегося
устройства, т. е. являются простейшим
механическим выпрямителем.
сли
внешняя цепь замкнута, то по ней потечет
ток, направленный от нижней щетки к
потребителю и от него – к верхней щетке.
Нижняя щетка оказывается положительным
выводом генератора, а верхняя –
отрицательным. При повороте витка на
180° проводники из зоны одного полюса
переходят в зону другого полюса и
направление ЭДС в них изменяется на
обратное. Одновременно верхняя
коллекторная пластина входит в контакт
с нижней щеткой, а нижняя – с верхней,
направление тока во внешней цепи не
изменяется. Таким образом, коллекторные
пластины не только обеспечивают
соединение вращающего витка с внешней
цепью, но и выполняют роль переключающегося
устройства, т. е. являются простейшим
механическим выпрямителем.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i. По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
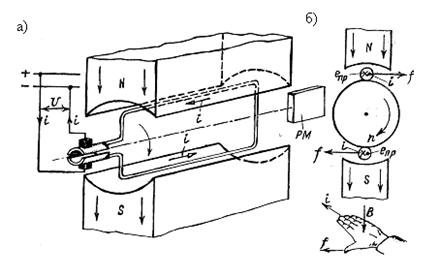
Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f,момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т.е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
Противодействующий момент и противо-ЭДС. При работе машины в режиме генератора по замкнутой внешней цепи и витку обмотки якоря протекает ток, направление которого совпадает с направлением ЭДС (рис. 1.4,6), взаимодействие тока с магнитным полем полюсов создает моментМ, направленный в рассматриваемом случае против часовой стрелки. Так как приложенный к витку вращающий момент приводного двигателя Мвр направлен по часовой стрелке, то возникающий при работе генератора момент называется противодействующим моментом Мnp. По существу возникновение Мпр — это реакция машины на воздействие внешнего момента Мвр, а физическая природа противодействующего момента та же, что и вращающего момента у двигателя. В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
При работе машины в режиме двигателя проводники якоря пересекают магнитное поле и в них наводится ЭДС (рис. 1.5,б). Ее направление определяется по правилу правой руки. В рассматриваемом случае она направлена против тока и, следовательно, навстречу приложенному напряжению сети U и поэтому называется противо-ЭДС Enp. Физическая природа противо-ЭДС та же, что и ЭДС генератора. В установившемся режиме работы двигателя между Enp и Uустанавливается равновесие и можно считать, что Enp ≈ U .
Таким образом, при работе машины постоянного тока в любом режиме во вращающихся проводниках наводится ЭДС Е и возникает момент М, но роль их в разных режимах различная.
7) Простые цепи постоянного тока и их расчёт
Последовательное соединение элементов — это такое соединение, когда конец предыдущего элемента служит началом последующего. При этом получается неразветвленная цепь, на всех участках которой ток один и тот же, а напряжения — разные.
Параллельное соединение — это соединение, при котором к одному узлу подключены начала всех элементов, а к другому узлу – концы всех элементов. При этом токи на всех участках различные, а напряжения – одинаковые.
Простой цепью называется цепь, представляющая собой комбинацию последовательных и параллельных соединений.
1) Последовательное соединение пассивных элементов (рис. 2.15)
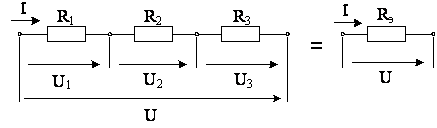
Рисунок 2.15
Здесь и далее будем вести расчет методом эквивалентных преобразований.
Две схемы называются эквивалентными друг другу, если при замене одной из них на другую не изменяются токи и напряжения в непреобразованной части цепи.
Для нахождения эквивалентного сопротивления последовательного соединения воспользуемся законом Ома и вторым законом Кирхгофа.
U1 = IR1; U2 = IR2; U3 = IR3;
U = U1+U2+U3 = I(R1+R2+R3) = IRэ.
Отсюда Rэ = R1+R2+R3. В общем случае:
![]() .
(2.15)
.
(2.15)
При последовательном
соединении суммируются сопротивления  ,
, ![]() .
.
8) Классификация и механические характеристики двигателя постоянного тока
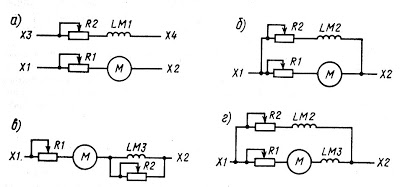
По способу создания магнитного потока различают электродвигатели с постоянными магнитами и электромагнитами. Электродвигатели с постоянными магнитами в силу относительно слабого магнитного потока изготовляют только небольшой мощности. Их используют в системах управления в качестве серводвигателей. Для привода рабочих машин применяются двигатели с электромагнитами, которые по способу включения обмоток, называемых обмотками возбуждения, подразделяются на двигатели с независимым (рис. 2.1, а), параллельным (рис. 2.1, б), последовательным (рис. 2.1, в) и смешанным (рис. 2.1, г) возбуждением. Различие между двигателями с независимым и параллельным возбуждением заключается в том, что у первого обмотка возбуждения LM1 и якорь М питаются от различных источников постоянного тока, а у второго LM2 и М — от одного. Напряжение возбуждения у двигателей с независимым возбуждением может быть равным напряжению приложенному к якорю, и отличным от него. У крупных двигателей в большинстве случаев напряжение возбуждения меньше напряжения, приложенного к якорю. У двигателя с последовательным возбуждением обмотка возбуждения LM3 включена последовательно с якорем М. Напряжение возбуждения меньше напряжения, приложенного к якорю. Двигатели с параллельным и последовательным возбуждением можно рассматривать как частный случай двигателя со смешанным возбуждением, имеющего 2 обмотки возбуждения LM2 и LM3. В цепь якоря включают пусковой реостат R1, а в цепь возбуждения регулирующий—R2. Механической характеристикой электродвигателя называется зависимость частоты вращения от вращающего момента на его валу при неизменной схеме включения и постоянных параметрах питающей сети и элементов цепей якоря и возбуждения. Характеристика называется естественной, если напряжение сети равно нормальному, а сопротивления реостатов R1 и R2 равны нулю (R1 = 0; R2 = 0), в противном случае характеристика называется искусственной. Аналитическое выражение механической характеристики двигателя может быть получено из соотношений, приведенных в курсе общей электротехники:
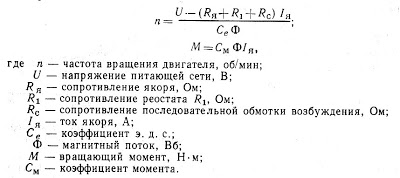
Для этого определим ток якоря
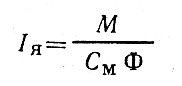
и, подставив его в формулу для частоты вращения якоря, получим уравнение механической характеристики двигателя:
![]()
При вращающем моменте М = 0
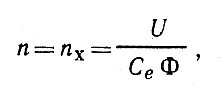
т. е. получим частоту вращения идеального холостого хода nx. У двигателей с независимым и параллельным возбуждением последовательная обмотка отсутствует (см. рис. 2.1, а и б),
поэтому магнитный поток, если пренебречь реакцией якоря не зависит от тока якоря и при изменении вращающего момента двигателя остается постоянным: Ф = const. Следовательно, для этих двигателей уравнение механической характеристики может быть записано так:
![]()
где b — угловой коэффициент характеристики;
Значение углового коэффициента b можно получить другим путем. При вращающем моменте заторможенного двигателя М = Мп (М п — пусковой момент двигателя) частота вращения n = 0. Тогда 0 = nx — bМп и угловой коэффициент b = nx/Мп. В этом случае механическая характеристика будет
![]()
Как видно из формул (2.1) и (2.2), механическая характеристика двигателей с независимым и параллельным возбуждением представляет собой прямую линию с угловым коэффициентом b (рис. 2.2, кривая 1), где b = tgβ.
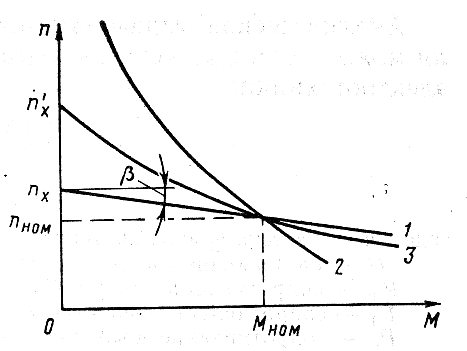
У двигателя с последовательным возбуждением обмотка возбуждения включена последовательно с обмоткой якоря, поэтому его магнитный поток является функцией тока якоря и механическая характеристика имеет вид гиперболы (кривая 2). При идеальном холостом ходе частота вращения неограниченно увеличивается. У реальных двигателей при номинальном режиме магнитная система близка к насыщению. Это вносит определенные искажения в форму механической характеристики, которая при перегрузках двигателя приближается к прямой линии,поскольку при насыщении магнитный поток становится практически постоянным и не зависит от момента. Механическая характеристика двигателя со смешанным возбуждением (кривая 3) занимает промежуточное положение между механическими характеристиками двигателей с параллельным и последовательным возбуждением. У него, как и у двигателей с параллельным и независимым возбуждением, частота вращения идеального холостого хода имеет определенное значение
![]()
где Ф1 — магнитный поток, создаваемый параллельной обмоткой возбуждения. Его механическая характеристика криволинейна вследствие изменения магнитного потока, вызванного влиянием последовательной обмотки возбуждения. Анализируя механические характеристики электродвигателей постоянного тока с различными способами включения обмоток возбуждения, можно прийти к выводу, что с изменением вращающего момента на валу электродвигателя его частота вращения изменяется незначительно у двигателя с параллельным возбуждением и в большей степени у двигателя с последовательным возбуждением. Мощность, развиваемая электродвигателем,
![]()
где w — угловая скорость двигателя. Следовательно, мощность, потребляемая из сети, у двигателя с последовательным возбуждением изменяется меньше. Поэтому механическую характеристику двигателя с параллельным возбуждением называют жесткой, а характеристику двигателя с последовательным возбуждением — мягкой. Характеристика двигателя со смешанным возбуждением обладает меньшей жесткостью, чем характеристика двигателя с параллельным возбуждением, но большей, чем характеристика двигателя с последовательным возбуждением.