ВОСТОЧНОУКРАИНСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ им. В.Даля кафедра автоматизации и компьютерно-интегрированных технологий |
|
Курсовой проект |
|
по дисциплине «Теория автоматического управления» на тему: анализ и оптимизация САР частоты вращения вала двигателя постоянного тока В - №13. |
|
|
|
Выполнил: |
студент КТ-381 Ольховского М. |
Проверил: |
Войцев А.В. |
Луганск 2010 |
 Оглавление
Оглавление
1.Задание и исходные данные
1.1 Исходные данные
1.2 Описание принципа действия САР
1.3 Определение передаточных функций элементов САР
1.4 Построение модели структурной схемы САР
1.5 Оценка устойчивости разомкнутого контура
2. СТАБИЛИЗАЦИЯ САР
2.1 Стабилизация контура уменьшением коэффициента усиления усилителя.
2.2 Стабилизация контура изменением параметров усилителя и звена ОСН.
3. Структурно-параметрическая оптимизация САР
3.1 Анализ ЛАЧХ и ЛФЧХ стабилизированной в разомкнутом состоянии САР.
3.2 Анализ частотных характеристик и предварительная коррекция САР
3.3 Определение настроечных параметров ПИ-регулятора
3.4 Введение ПИ - регулятора в контур управления
3.5 Уточнение настроечных параметров ПИ-регулятора
4. ОЦЕНКА КАЧЕСТВА САР
4.1 Показатели качества переходного режима
4.2 Показатели качества установившегося режима
4.3 САР ЧВ ДПТ осуществляет слежение и стабилизацию
5. Заключение
6. Литература
1.1 Исходные данные 2
1.3 Определение передаточных функций элементов САР 2
2.2 Стабилизация контура изменением параметров усилителя и звена ОСН. 2
3. Структурно-параметрическая оптимизация САР 2
3.4 Введение ПИ - регулятора в контур управления 2
4. ОЦЕНКА КАЧЕСТВА САР 2
1.1 Исходные данные 5
1.3 Определение передаточных функций элементов САР 6
1.4 Построение модели структурной схемы САР Используя среду VisSim’а и полученные выше данные, строим структурную схему и получаем передаточную характеристику (рис. 1.2). 8
1.5 Оценка устойчивости разомкнутого контура 8
2. Стабилизация САР 10
2.1 Стабилизация контура уменьшением коэффициента усиления усилителя. 10
10
11
2.2 Стабилизация контура изменением параметров усилителя и звена ОСН. 11
3. Структурно-параметрическая оптимизация САР 14
3.2 Анализ частотных характеристик и предварительная коррекция САР 15
3.3 Определение настроечных параметров ПИ-регулятора 18
3.4 Введение ПИ - регулятора в контур управления 19
3.5 Уточнение настроечных параметров ПИ-регулятора 21
4. ОЦЕНКА КАЧЕСТВА САР 24
5.Заключение 27
6. Литература 28
1. Задание и исходные данные
Построить модель системы автоматического регулирования, исследовать ее, оптимизировать и оценить качество полученной системы
1.1 Исходные данные
Функциональная схема САР представлена на рис. 1.1.
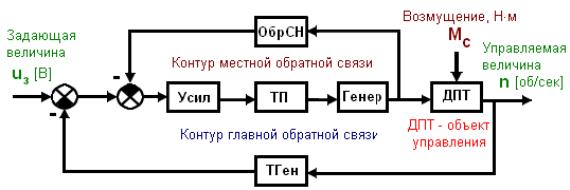
Рисунок 1.1 - Функциональная схема САР
Усил – усилитель;
ТП – тиристорный преобразователь;
Генер – генератор;
ДПТ – Двигатель постоянного тока;
ТГен – тахогенератор;
ОбрСН – обратная связь по напряжению;
n – частота вращения;
u3 - напряжение задания;
Мс – момент сопротивления.
1.2 Описание принципа действия сар
Задачей данной системы автоматического регулирования является управление электродвигателем постоянного тока (регулировка количества оборотов вала электродвигателя в минуту). САР состоит из двух контуров с обратной связью.
Контур с местной обратной связью состоит из усилителя, тиристорного преобразователя, генератора и обратной связи по напряжению. Усилитель предназначен для усиления входного сигнала, перед подачей на тиристорный преобразователь, который служит для плавного пуска и длительного регулирования скорости вращения вала электродвигателя. Обратная связь по напряжению является местной обратной связью, позволяет оценить ошибку между необходимым напряжением, которое необходимо подать на электродвигатель и напряжением, которое подает генератор. В контур главной обратной связи входит тахогенератор, который преобразует частоту вращения вала в напряжение, он позволяет определить ошибку регулирования всей системы.
1.3 Определение передаточных функций элементов сар
N – номер варианта. N=13
У – усилитель моделируется апериодическим звеном с передаточной функцией:

ТП – тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией:

ОбрСН – обратная связь по напряжению, инерционно-дифференцирующее звено:

ТХ – тахогенератор, усилительное (пропорциональное) звено:

Генератор
ДПТ – двигатель постоянного тока, колебательное звено. Его передаточная функция по каналу управления:

где:





1.4 Построение модели структурной схемы сар Используя среду VisSim’а и полученные выше данные, строим структурную схему и получаем передаточную характеристику (рис. 1.2).
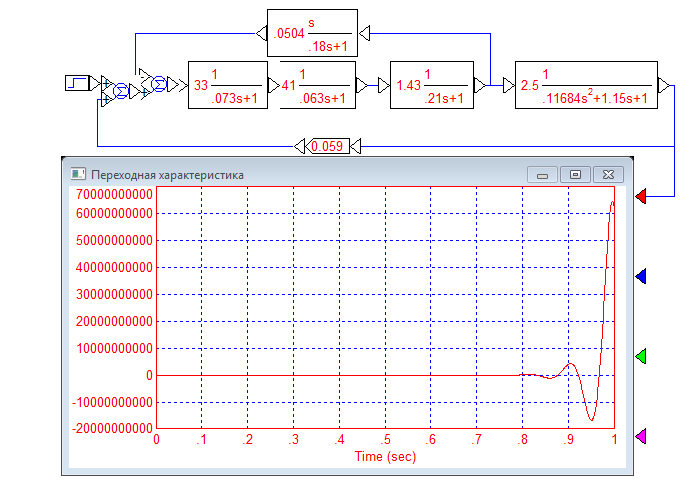
Рисунок 1.2 - Модель исходной САР
Переходная характеристика исходной САР представляет собой колебательный процесс с увеличивающейся со временем амплитудой. Исходная САР неустойчива.
1.5 Оценка устойчивости разомкнутого контура
Для того чтобы оценить устойчивость разомкнутого контура, нужно смоделировать его в программе VisSim, для этого мы размыкаем схему на элементе тахогенератора и ставим его последним в схеме как показано на рис. 1.3.
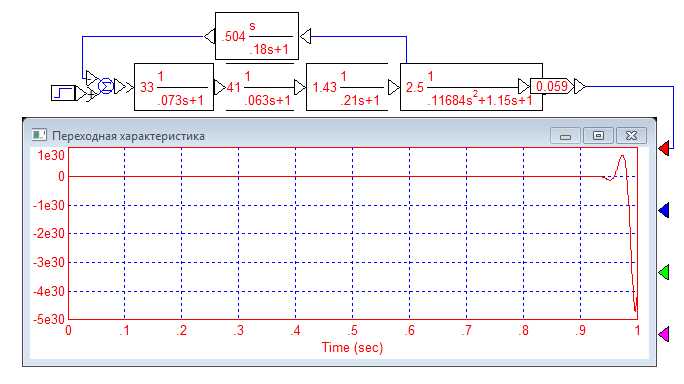
Рисунок 1.3 - Проверка устойчивости разомкнутого контура САР.
График переходной функции показывает, что разомкнутый контур неустойчив, поскольку его выходной сигнал представляет собой колебания с быстро увеличивающейся амплитудой. Для обеспечения выполнения необходимого условия практического применения критерия Найквиста, разомкнутую САР требуется стабилизировать.
Стабилизацию разомкнутого контура можно осуществить изменением параметров двух элементов: усилителя и звена обратной связи по напряжению.