

5. Розрахунок і моделювання системи автоматичного регулювання
5.1. Вихідні дані
В даному розділі проводимо дослідження САР температури в пропарювальному котлі (контур 1 на ФСА).
Об’єктом регулювання є пропарювальний котел. Вихідною величиною даного об’єкту регулювання є температура в пропарювальному котлі, вхідною - переміщення регулюючого органу на трубопроводі пари, а збурюючою – витрата технологічної тріски.
Максимальна стрибкоподібна зміна регулюючої дії Yмакс=20 % переміщення РО.
Функція
передачі каналом збурення
![]() ,
,
![]()
Вихідними даними для побудови моделі ОР каналом регулюючої дії є експериментальна крива розгону по температурі в пропарювальному котлі, отримана стрибкоподібною зміною переміщення РО на 8%.
Вихідні дані занесені в таблицю 5.1.
Таблиця 5.1.
t, c |
Т, °С |
0 |
160.00 |
15 |
160.21 |
40 |
162.28 |
65 |
165.19 |
90 |
167.59 |
115 |
169.06 |
140 |
169.75 |
162 |
170.08 |
180 |
170.20 |
200 |
170.23 |
Якість регулювання в замкнутій САР характеризують такими показниками перехідного процесу:
Максимальна динамічна похибка регулювання Удин - це максимальне відхилення регульованої величини в перехідному режимі від її заданого значення. Ця похибка дорівнює першій амплітуді коливань регульованої величини у перехідному процесі (Удин =А1).
Час регулювання τр - це час, протягом якого, починаючи з моменту дії збурення на САР, регульована величина досягає нового рівноважного значення з деякою заздалегідь встановленою точністю ± Δ і надалі не виходить за межі цієї зони. Час регулювання характеризує швидкодію САР.
Перерегулювання регульованої величини φ - це виражене у відсотках відношення другої А2 і першої А1 амплітуд, спрямованих в протилежні сторони:
![]()
Коефіцієнт заникання ψ:
![]()
Час першого узгодження перехідного процесу tпс - час, після закінчення якого керована величина перший раз досягає свого сталого значення (також характеризує швидкість протікання процесу в початковий період);
Допустимий час досягнення першого максимуму - tmах.
Вимоги до якості процесу регулювання:
1. Допустиме максимальне динамічне відхилення А1=10 °С;
2.Допустима похибка регулювання = ±1 °С;
3.Допустимий час регулювання tp=280 с;
4. Ступінь коливальності m=0.24;
5. Друга інтегральна оцінка перехідного процесу за збуренням - min.
5.2. Побудова математичної моделі ор
Щоб розрахувати систему автоматичного регулювання даного контуру визначаємо математичну модель об'єкту. Математичну модель об'єкта регулювання для розрахунків оптимальних параметрів настройки регулятора знаходимо у вигляді функції передачі.
Побудуємо математичну модель за наявністю експериментальної знятої на об'єкті кривої розгону, яка відображає зміну температури в пропарювальному котлі від зміни положення регулюючого органа подачі пари на 8 %.
Щоб розрахувати систему автоматичного регулювання даного контуру визначаємо математичну модель об'єкту. Експериментальна крива розгону об'єкту регулювання температури в пропарювальному котлі представлена на рис.5.1.
Програма в середовищі Matlab для побудови експериментальної кривої розгону
clear,clc;
t=[0 15 40 65 90 115 140 162 180 200];
T=[160 160.21 162.28 165.19 167.59 169.06 169.75 170.08 170.20 170.23];
plot(t,T); grid; xlabel('t,с'); ylabel('T,^oC ');
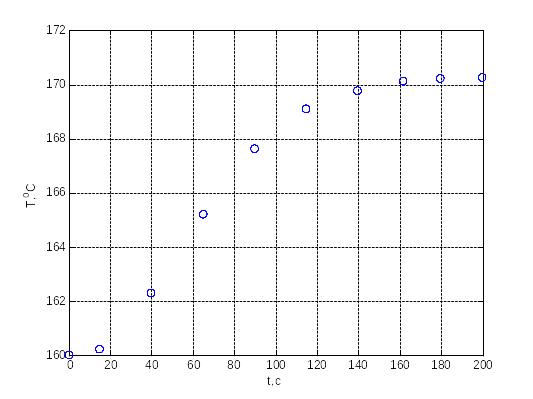
Рис.5.1. Експериментальна крива розгону, яка відображає зміну температури в пропарювальному котлі від зміни положення регулюючого органа на 8 %
Для
зручності розрахунків експериментальну
криву розгону об’єкта регулювання
![]() нормуємо діленням її значень на
максимальну зміну вихідної величини
нормуємо діленням її значень на
максимальну зміну вихідної величини
![]() .
.
де
![]() значення вихідної величини після
завершення перехідного процесу;
значення вихідної величини після
завершення перехідного процесу;
![]() -
початкове (номінальне) значення
регульованої величини.
-
початкове (номінальне) значення
регульованої величини.
Програма в середовищі Matlab для побудови нормованої експериментальної кривої розгону
clear,clc;
t=[0 15 40 65 90 115 140 162 180 200];
T=[160 160.21 162.28 165.19 167.59 169.06 169.75 170.08 170.20 170.23];
Tzavd=160;
Tmax=max(T);
delT=Tmax-Tzavd;
Tout=(T-Tzavd)/delT;
figure(2),plot(t,Tout);xlabel('t,c');title('normovana kryva rozgonu ');grid;
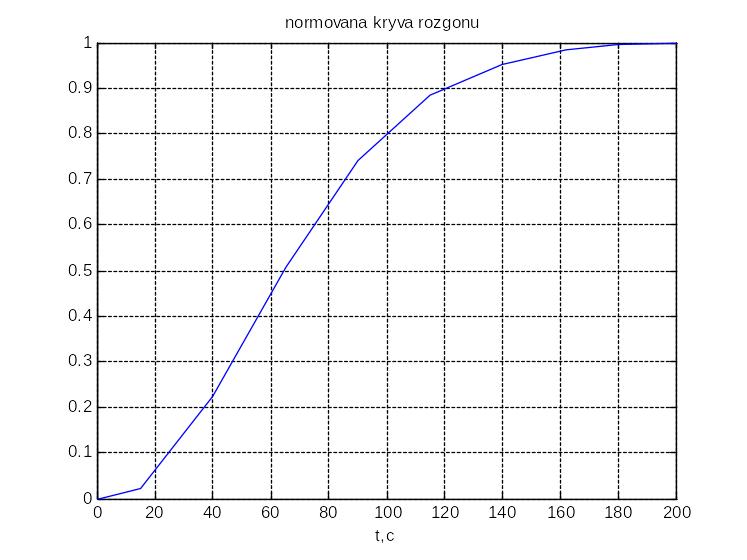
Рис.5.2. Нормована експериментальна крива розгону ОР
Відзначимо, що розмірний коефіцієнт передачі об’єкта регулювання з експериментальної кривої розгону визначається за формулою.
![]() ,
,
![]()
![]() ,
,
![]()
де
![]() значення
стрибкоподібної зміни вхідної величини,
яка викликала зміну вихідної величини.
значення
стрибкоподібної зміни вхідної величини,
яка викликала зміну вихідної величини.
Виходячи з характеру експериментальної кривої вибираємо передбачувану структуру моделі об’єкта і відповідну до неї функцію передачі в загальному вигляді послідовного з’єднання трьох аперіодичних ланок:
![]()
де Т1, Т2, Т3 – сталі часу;
k – коефіцієнт передачі.