

МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД
ДЕРЖАВНИЙ КОМІТЕТ РИБНОГО ГОСПОДАРСТВА УКРАЇНИ
ОДЕСЬКЕ МОРЕХІДНЕ УЧИЛИЩЕ РИБНОЇ ПРОМИСЛОВОСТІ ім. О.СОЛЯНИКА
КЕРЧЕНСЬКОГО ДЕРЖАВНОГО МОРСЬКОГО ТЕХНОЛОГІЧНОГО УНІВЕРСІТЕТУ
ОСНОВИ СУДНОВОЇ ЕЛЕКТРОАВТОМАТИКИ
Методичні рекомендації та вказівки
щодо організації і проведення самостійних робіт
з вивчення навчального матеріалу курсантами
спеціальності 5.07010407
«Експлуатація електрообладнання та автоматики суден»
кваліфікації «Судновий електромеханік»
Навчально-методичний посібник
ОМУ РП
__.___.__
Одеса
2013
Методичні рекомендації і вказівки
Розробив викладач
________________ М.Є.Михайлов.
Розглянуто і схвалено на засіданні
циклової комісії електромеханічних
дисциплін ___ _________ 2013 н .р.
Протокол № ____
Голова комісії ____________ М.Є.Михайлов.
Затверджую
Заступник начальника училища
З навчальної роботи
_____________ Н.О.Мельник
____ _____________2013 р.
1. Вступ. Зміст дисципліни та її місце в навчальному процесі. Суднова електроавтоматика та автоматизація суден. Сучасний стан автоматизації морських суден та її перспектива розвітку.
Автоматизация судов — это процесс, при котором функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются приборам и техническим устройствам. Автоматизация судовождения обеспечивает безопасность рейсов судов. При автоматизации судовых энергетических установок повышается надежность и экономичность работы оборудования, увеличивается производительность и улучшаются условия труда плавсостава, сокращается его численность.
Различают частичную и комплексную автоматизацию. В 40—50-х гг. началась автоматизация отдельных механизмов на судах.
Работы в области комплексной автоматизации отечественных судов были начаты в 60-х годах. На судах типа «Новгород» было реализовано шесть различных программ автоматизации, что дало возможность накопить значительный опыт эксплуатации автоматизированных судов. Полученные результаты отражены в Правилах Регистра.
Надзору на судне подлежат системы автоматизации главных двигателей, котельной установки, судовой электростанции, системы компрессоров сжатого воздуха, осушительной системы, вспомогательных механизмов и др.
Межремонтный ресурс автоматизированного оборудования должен быть не менее 25 тыс. ч, ежегодная наработка оборудования без подрегулировок и наладок должна составлять не менее 5 тыс. ч.
Элементы и устройства автоматизации должны безотказно работать при длительном крене судна до 22,5 ° и длительном дифференте до 10°, а также при бортовой качке до 45 ° с периодами 5—17 сек.
Все оборудование автоматизации конструируют, или выбирают по принципу «выход из строя в безопасную сторону».
На современных автоматизированных судах общее число средств так называемой «периферийной автоматики» достигает 500—700 ед. Практика эксплуатации показывает, что именно эта аппаратура наименее надежна. Многочисленные датчики и сигнализаторы имеют ресурсные характеристики в 2—2,5 раза ниже, чем гарантированный ресурс самих комплексных систем автоматизации. Характеристики надежности комплексных систем автоматизации, поставляемых на флот, гарантируются разработчиками без учета входящих в системы датчиков. При гарантированном техническом ресурсе автоматизированного комплекса, равном 25 тыс. ч, и суммарной наработке на отказ не менее 5 тыс. ч до 75 % входящих в него датчиков имеют технический ресурс 5—10 тыс. ч и фактическую наработку не более 2—3 тыс.
Первостепенными задачами на современном этапе развития автоматизации являются: повышение надежности элементной базы; организация технического обслуживания систем автоматизации в судовых условиях и в порту; подготовка кадров, способных технически грамотно эксплуатировать системы автоматизации и выполнять необходимые профилактические мероприятия.
В качестве основных понятий приняты следующие:
система автоматизации — это совокупность элементов и устройств для создания конструктивного и функционального целого, предназначенного для выполнения определенных функций в области управления, контроля и защиты;
элемент системы автоматизации — это самостоятельный в конструктивном отношении прибор (или устройство), используемый в системе автоматизации (например, реле, измерительное устройство, сервопривод, датчик, исполнительный механизм, усилитель). Автоматизированными объектами могут быть: двигатель, котельная установка, судовые системы или другие устройства, оборудованные системами и устройствами автоматического регулирования, управления, контроля и защиты;
управление — это процесс задания, поддержания режима работы объекта на основе анализа информации о его состоянии. Все виды управления могут быть непосредственными (местными) или дистанционными. В системах дистанционного автоматизированного управления (ДАУ) должна быть обеспечена возможность дистанционного задания одним органом управления требуемых режимов работы при автоматическом выполнении промежуточных операций по заданной программе и исключена возможность одновременного управления с разных постов;
регулирование — такой процесс управления непрерывными режимами, при котором параметр, характеризующий режим, поддерживается в заданных пределах постоянным или изменяющимся по определенной программе, реализуемой регулятором;
регулятор — автоматическое устройство, воспринимающее отклонение некоторого значения от заданного и воздействующее на процесс в сторону восстановления регулируемого параметра. Существует множество регуляторов, которые можно классифицировать по разным признакам (например, регулятор уровня гидравлический с изодромной обратной связью, регулятор уровня электрический без обратной связи).
Регуляторы могут быть: по виду используемой энергии — прямого действия, гидравлическими, пневматическими, электрическими, комбинированными; по типу обратной связи — без обратной связи, с жесткой обратной связью, с изодромной обратной связью, комбинированными. Кроме того, по параметрам регулирования могут быть регуляторы давления, температуры, уровня, частоты вращения и д.р.;
регулируемая величина — физический показатель, характеризующий состояние происходящего в объекте регулирования процесса. Регулируемыми величинами применительно к судовым установкам являются частота вращения двигателя, температура воды, масла и пара, уровень воды в котле, топлива и масла в емкости, давление пара, воды, масла и т. д.
На судах широкое распространение получают вычислительная техника, микропроцессоры и микроЭВМ. В перспективе с помощью судовой системы обработки данных могут быть решены вопросы:
фиксирования части оперативной информации, связанной с эксплуатацией технических средств (ТС) и используемой до очередного заводского ремонта (отклонение параметров от допустимых пределов, срабатывание средств защиты, переключение механизмов и т. п.);
регистрации отчетно-статистической информации, используемой после завершения эксплуатационного цикла для последующего анализа состояния ТС и уровня их технического обслуживания с целью определения и планирования мероприятий по улучшению эксплуатационных характеристик оборудования и судна в целом;
возможности восстановления последовательности событий при анализе аварийных ситуаций;
сокращения до минимума трудозатрат экипажа на ведение судовой отчетности и переход к автоматическому заполнению машинного журнала;
создания предпосылок к автоматизированной обработке документов судовой отчетности на разных уровнях.
2. Основні визначення: автоматизація, автоматичне управління, автоматичне регулювання, пристрої автоматизації, автоматичний захист. Автоматизована система управління, комплексні системи управління та групові системи управління, інформаційні системи, системи диагностування та прогнозування технічних засобів, дистанційне автоматизоване управління.
Слова «автоматизация» и «автоматика» происходят от греческого слова «автоматос», что означает «самодействующий».
Автоматика — это наука об общих принципах и методах построения автоматических систем, т. е. систем, выполняющих поставленные перед ними цели без непосредственного участия человека.
Автоматизация — использование принципов автоматики, а также технических средств, реализующих эти принципы в различных отраслях народного хозяйства, в том числе и на морском флоте.
Системы автоматического регулирования (САР) отличаются от систем автоматического управления тем, что в последних происходит как формирование поведения объекта на основании цели управления в виде задающих (управляющих) воздействий, так и их исполнение.
В САР происходит лишь их отработка, а сами управляющие воздействия, поступающие на элемент сравнения, считаются заданными. Проблема автоматического управления является более общей и выходящей за рамки автоматического регулирования.
Автоматические системы делятся на два основных класса: циклические (разомкнутые), действующие по жесткой программе, и ациклические (замкнутые), действующие на основе принципа обратной связи.
Принцип обратной связи заключается в том, что оптимальное поведение объекта (двигателя, судна и т. д.) сравнивается с его действительным поведением и получающаяся при этом ошибка используется для того, чтобы свести ее к нулю или сохранить в заданных пределах.
Автоматическим регулированием называется поддержание постоянными или изменение по заданному закону параметров, влияющих на работу объекта регулирования, осуществляемое без участия человека. На изменение параметров может воздействовать внешняя среда (внешнее воздействие) или одна часть системы на другую (внутреннее воздействие).
Каждый объект управления (регулирования) имеет управляемый параметр и исполнительный орган. В общем случае и тех и других может быть несколько. Управляемый (регулируемый) параметр — физическая величина, характеризующая работу системы ν подлежащая регулированию, например курс судна, частота вращения напряжение генератора и т. п. Исполнительный орган — элемент или техническое устройство, осуществляющее непосредственное воздействие на объект управления по сигналам управления. Ими могут быть: для судна — перо руля, для дизеля — рейка топливного насоса, для электродвигателя или генератора — обмотки возбуждения, пары полюсов н т. п.
Автоматизация управления объектом — оснащение объекта средствами автоматизации для полного или частичного освобождения человека от выполнения операций по сбору и обработке информации, определения управляющих параметров и исполнения воздействия.
Средства автоматизации — системы управления и информационные системы, вычислительные машины и комплексы, приборы vi устройства, осуществляющие управление объектом. Система ( управления объектом — функционально и конструктивно законченное изделие, обеспечивающее управление объектом.
Автоматическое управление — совокупность операций, необходимых для пуска, автоматической защиты автоматических устройств и остановки процесса. Если же требуется только поддержание заданного значения или изменение регулируемых параметров, то говорят об автоматическом регулировании. Например, автоматический пуск резервного дизель-генератора относится к автоматическому управлению, а стабилизация напряжения генератора — к автоматическому регулированию.
Автоматическая защита — автоматическое управление техническими средствами, обеспечивающее предотвращение аварийной ситуации.'
Ручное управление осуществляется воздействием человека непосредственно на исполнительные органы объекта путем местного или дистанционного управления. Местное управление выполняется оператором из того же помещения, где расположен управляемый объект или в непосредственной близости от него. При дистанционном управлении задаваемые команды исполняются после воздействия человека на органы управления, расположенные на расстоянии от объекта регулирования.
Автоматизированной системой управления (АСУ) называется совокупность управляемого объекта и технических средств, осуществляющих автоматизированное управление с участием человека.
Под дистанционным автоматизированным управлением (ДАУ) понимается управление с автоматическим выполнением по команде человека функционально связанных совокупностей операций сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на исполнительные органы и их исполнения. Комплексные системы управления (КСУ) тех- ническими средствами — это единые системы, управляющие всеми Техническими средствами судна. Составными частями КСУ, в частности, являются информационная судовая система, групповая система управления и система технического диагностирования.
Информационная судовая система обеспечивает выдачу информации о состоянии технических средств в систему управления (СУ) и (или) операторам.
Групповая система управления (ГСУ) техническими средствами — составная часть КСУ, выделенная как самостоятельное изделие в соответствии с принятыми принципами комплектования.
Система технического диагностирования — комплекс средств, осуществляющих определение технического состояния системы по правилам, установленным соответствующей документацией с выдачей информации о месте и причинах дефектов. Наряду с диагностированием может выполняться прогнозирование состояния технических средств, под которым понимается определение технического состояния объекта на предстоящий интервал времени.
3. Загальні положення про системи автоматики: системи автоматичного управління (САУ), системи автоматичного регулювання (САР). Структурно-функціональні схеми таких систем. Уявлення про зворотні зв’язки.
С появлением и развитием автоматических устройств возникла новая отрасль науки и техники — автоматика, — охватывающая теорию автоматического управления и регулирования, а также рассматривающая построение автоматических средств и систем.
Система — это совокупность элементов, определенным образом связанных и взаимодействующих между собой. Автоматическая система без участия человека управляет и контролирует поведение объекта или протекание процессов в нем. Автоматизация судовых систем электроавтоматики является лишь одной из составных частей комплексной автоматизации судна. По характеру автоматизируемых функций судовые системы электроавтоматики можно разделить на:
— системы автоматического управления (САУ), обеспечивающие возможность управлять судовой электроустановкой и изменять режимы ее работы, приспосабливаясь к изменяющимся внешним условиям без участия человека;
— системы дистанционного управления (ДАУ), обеспечивающие возможность на расстоянии включать и выключать отдельные механизмы и устройства, при этом человек непосредственно участвует в процессе управления;
— системы автоматического регулирования (САР), обеспечивающие возможность поддержания требуемых параметров в заданных пределах (например, равномерного распределения нагрузки параллельно работающих генераторов), при этом человек освобождается от непосредственного участия в процессе -регулирования;
— системы автоматического контроля (САК), обеспечивающие измерение текущих значений контролируемых параметров (например, напряжения, тока, сопротивления, температуры, давления и т. п.), сравнение этих величин с допустимыми значениями и световую и звуковую сигнализацию об отклонении параметров от заданных значений;
— системы автоматической защиты и блокировки (САЗ), обеспечивающие предотвращение возникновения аварийных ситуаций или ограничивающие развитие аварии.
Независимо от назначения и степени сложности в любой системе автоматического управления выделяются общие для всех систем основные элементы, объединив которые соответствующим образом можно получить функциональную схему, показанную на рис. 3.1. На таких схемах расположение элементов САУ и их взаимосвязь осуществляется на основе выполняемых ими функций в процессе работы системы.
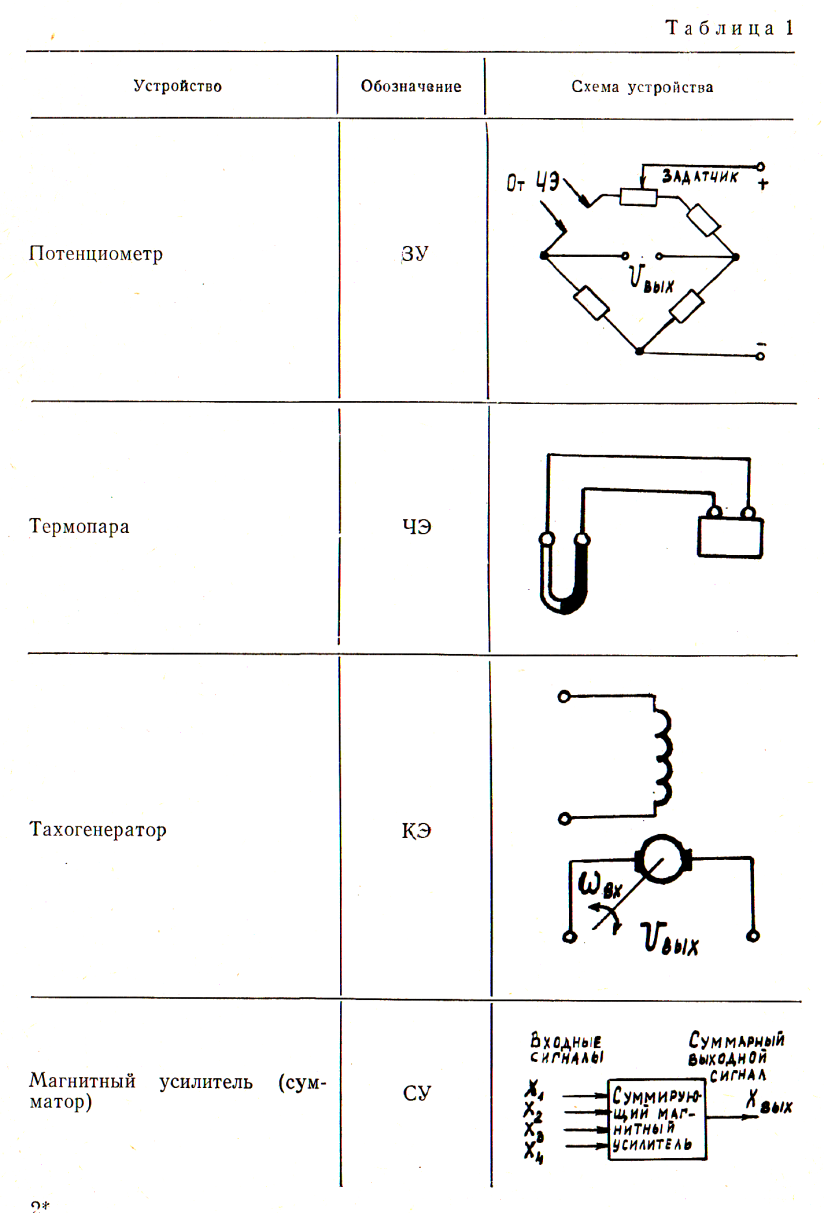
Требуемое значение управляемой величины Xвых(t) определяется задающим воздействием Xвх(t), поступающим от задающего устройства (ЗУ). ЗУ формирует задающее воздействие, которое представляет собой физическую величину (напряжение, ток, давление, угол поворота вала и т. д.), и вводится в систему для получения необходимого изменения Xвыx(t) в соответствии с законом управления. В качестве ЗУ может быть использован, например, потенциометр, поставленный в одно из плеч электрического моста. В табл. 1 приведены некоторые примеры элементов судовой электроавтоматики в соответствии с функциональной схемой.
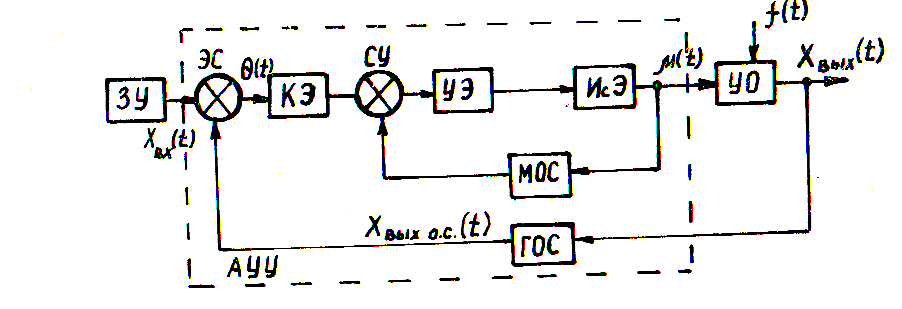
Рис. 3.1. Функциональная схема САУ
Элемент сравнения (ЭС) предназначен для сравнения измеряемого значения управляемой величины с задающим воздействием. Если в ЭС кроме сравнения происходит преобразование сигнала, то он называется чувствительным элементом (ЧЭ). Примером такого ЧЭ могут быть: контактные элементы (реле перемещения), потенциометрические элементы, емкостные и индуктивные элементы, термоэлектрические элементы (термопары), контактные и бесконтактные сельсины, вращающиеся трансформаторы, фотоэлементы и т. д.
Корректирующий элемент (КЭ) применяется для коррекции (улучшения характеристик системы) при помощи дополнительных узлов и цепей. Он может быть включен последовательно в цепь прохождения сигнала или параллельно этой цепи. Коррекция осуществляется либо путем изменения управляющего воздействия μ(t), либо путем изменения свойств отдельных элементов системы. Изменение μ(t) достигается добавлением к нему других сигналов, зависящих от возмущающего воздействия f(t) (коррекция по возмущению) или от сигнала рассогласования (отклонения) управляемой величины от требуемого значения (коррекция по отклонению). Примером КЭ могут быть тахогенераторы постоянного и переменного тока, генераторы постоянного тока с независимым возбуждением, дифференцирующие или интегрирующие пассивные RC-пепи, стабилизирующие трансформаторы и т. п.
Суммирующее устройство (СУ) предназначено для суммирования сигналов от различных элементов, например, электрический мост, суммирующий магнитный усилитель и т. п.
Усилительный элемент (УЭ) предназначен для усиления сигналов, поскольку последние обычно являются маломощными и не могут непосредственно использоваться для приведения в действие исполнительного элемента. В системах судовой электроавтоматики применяются электронные, полупроводниковые, магнитные, электромашинные и другие усилители постоянного и переменного тока, знакочувствительные и фазочувствитель-ные, одно-, двух-, трех- и многокаскадные.
Исполнительные элементы (ИсЭ) применяются для приведения в движение регулирующих органов объектов управления, от положения которых зависит значение управляемой величины САУ. ИсЭ используются для включения и выключения электрических, механических, гидравлических и пневматических цепей; для сцепления и расцепления вращающихся валов; открывания и закрывания клапанов, золотников, задвижек и т. д. ИсЭ служат также для плавного перемещения или поворота различных частей механизмов, причем скорость перемещения (поворота) зависит от величины подводимого тока. ИсЭ могут быть разделены на электромеханические, гидравлические, пневматические. В качестве ИсЭ широко используются серводвигатели: двигатели постоянного тока, двухфазные и трехфазные асинхронные двигатели, электромагнитные муфты (для автоматического соединения и разъединения вращающихся валов) и релейно-контакторная аппаратура (для включения и выключения различных электрических цепей).
Управляемый объект (УО) — это техническое устройство, которое нуждается в оказании специально организованных воздействий извне для правильного выполнения процессов, происходящих в нем. К УО можно отнести само судно, главные судовые энергетические установки, генераторы судовых электростанций, электродвигатели различных судовых электроприводов и т. п. Управляемыми величинами объекта управления могут служить напряжение на зажимах генератора судовой электростанции, давление воздуха пусковых баллонов, температура рефрижераторных камер, частота вращения главного судового двигателя и т. д.
Поскольку УО, как правило, самостоятельно не способен противодействовать влиянию любых внешних возмущений, то осуществляется управляющее (специальное воздействие извне) воздействие с целью поддержания управляемой величины в заданных пределах.
Местная обратная связь (МОС), как правило, представляет собой параллельно включенный корректирующий элемент. Различают жесткую и гибкую обратные связи. Жесткая обратная связь не содержит интегрирующих и дифференцирующих элементов. При такой связи сигнал на выходе однозначно определяется сигналом на входе. Если в цепи имеются дифференцирующие элементы, то обратная связь называется гибкой. Сигнал гибкой обратной связи зависит от скорости изменения сигнала на входе связи. Гибкие обратные связи с помощью тахогенераторов получили наибольшее распространение в электромеханических системах.
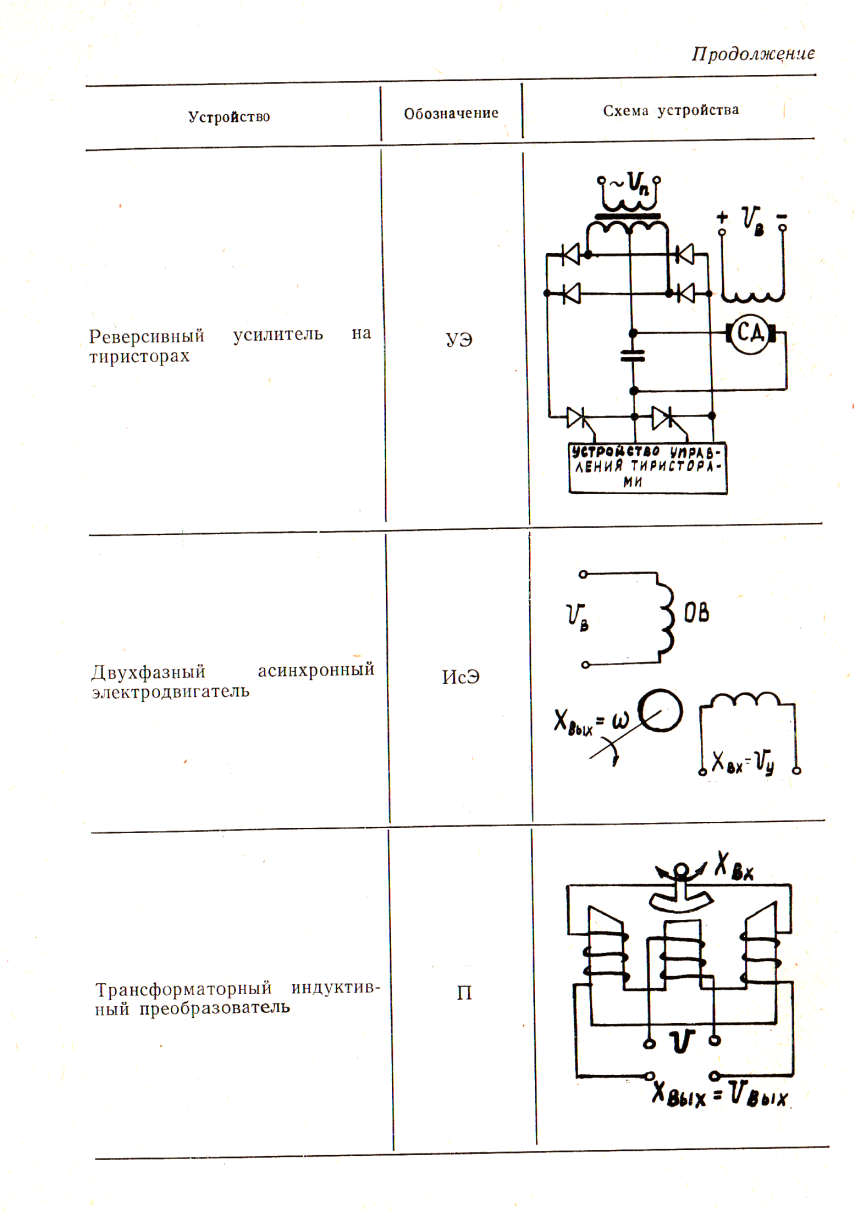
Главная обратная связь (ГОС) обычно состоит из нескольких конструктивных элементов, основным среди которых является преобразователь (П). Преобразователи служат для преобразования одной физической величины в другую или в ту же, но с другими параметрами. С помощью преобразователей осуществляются все основные процессы по преобразованию электрических сигналов: генерирование, модуляция, усиление, выпрямление, инвертирование, преобразование частоты. Это транзисторные и тиристорные преобразователи, фазочувствительные выпрямители, стабилизаторы напряжения, триггеры, бесконтактные логические элементы, трансформаторы, тахогенераторы, индуктивные и температурные датчики, сельсины и т. п.
Все рассмотренные элементы САУ, кроме управляемого объекта, представляют собой собственно регулятор системы или автоматическое управляющее устройство (АУУ), которое осуществляет воздействие на управляемый объект в соответствии с законом управления. Таким образом, система автоматического управления представляет собой совокупность управляемого объекта и управляющего устройства, которые взаимодействуют между собой в соответствии с законом управления (рис. 2).
Как видно из рис. 3.2, в общем случае на вход АУУ, помимо задающего воздействия Хвх(t) поступают управляемая величина Хвых(t) и возмущающее воздействие f(t). Таким образом, АУУ присоединяется к объекту управления с двух сторон: с одной стороны — к выходу объекта, а с другой — к регулирующему органу на его входе.
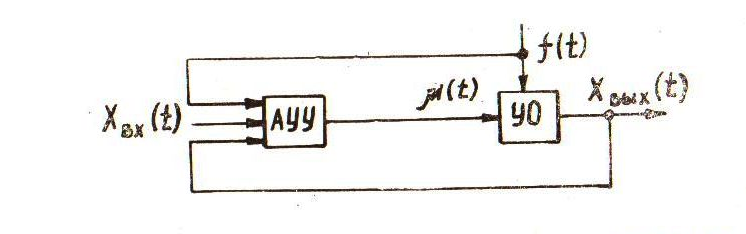
Рис. 3.2. Упрощенная схема системы атоматического управления