

Развертка окружности. Преобразование отрезков. Развертка эллипса.
Развёртка окружности:
Уравнение окружности: x2+y2=R2
Достаточно построить 1/8 часть, остальные могут быть получены отражениями.

Генерировать будем из точки х=0, у=R по часовой стрелке.
На каждом шаге алгоритм выбирает точку Pj(xj,yj) ближайшую к окружности одним из трех способов:
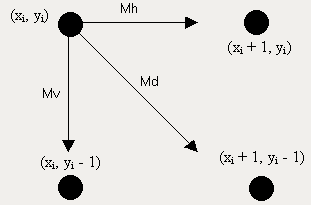
Возможные типы пересечения окружности и растровой сетки:

Выбирается минимальное значение
Разность между квадратами расстояний от центра окружности до диагонального пиксела (хi + 1, yi - 1) и от центра до точки на окружности R2 равна Δi = (xi + 1)2 + (yi - 1)2 - R2.
Как и в алгоритме Брезенхема для отрезка, для выбора соответствующего пиксела желательно использовать только знак ошибки, а не ее величину.
При Δi < 0 диагональная точка (хi + 1, yi - 1) находится внутри реальной окружности, т. е. это случаи 1 или 2 на рис. 2.8. Ясно, что в этой ситуации следует выбрать либо пиксель (хi + 1, yi), т. е. Mh, либо пиксель (хi + 1, yi - 1), т. е. Md. Для этого сначала рассмотрим случай 1 и проверим разность квадратов расстояний от окружности до пикселов в горизонтальном и диагональном направлениях:
δ = |(xi + 1)2 + (yi)2 - R2| - |(xi + 1)2 + (yi - 1)2 - R2|
При δ < 0 расстояние от окружности до диагонального пиксела (Md) больше, чем до горизонтального (Mh). Напротив, если δ > 0, расстояние до горизонтального пиксела (Mh) больше. Таким образом,
при δ <= 0 выбираем Mh в (xi + 1, yi)
при δ > 0 выбираем Md в (xi + 1, yi - 1)
При δ = 0, когда расстояние от окружности до обоих пикселов одинаковы, выбираем горизонтальный шаг.
Количество вычислений, необходимых для оценки величины δ, можно сократить, если заметить, что в случае 1
(xi + 1)2 + (yi)2 - R2 >= 0
(xi + 1)2 + (yi - 1)2 -R2 < 0
так как диагональный пиксел (xi + 1, yi - 1) всегда лежит внутри окружности, а горизонтальный (xi + 1, yi) - вне ее. Таким образом, δ можно вычислить по формуле
δ = (xi + 1)2 + (yi)2 - R2 + (xi + 1)2 + (yi - 1)2 - R2
Дополнение до полного квадрата члена (yi)2 с помощью добавления и вычитания -2yi + 1 дает
δ = 2[(xi + 1)2 + (yi - 1)2 - R2] + 2yi -1
В квадратных скобках стоит по определению Δi, и его подстановка
δ = 2(Δi + yi) - 1
Преобразование отрезков
алгоритм Брезенхема
этот алгоритм выбирает оптимальные растровые координаты для представления отрезков. Одна из координат (x или y), в зависимости от углового коэффициента, изменяется на 1. изменение другой координаты зависит от расстояния между действительным положением отрезка и ближайшими координатами сетки. это расстояние называется ошибкой. алгоритм построен на проверке знака этой ошибки.
решение принимается в зависимости от того, проходит ли прямая выше середины точки (1/2). в этом и заключается оптимальность алгоритма.
Алгоритм построен так, что требуется проверять лишь знак этой ошибки.
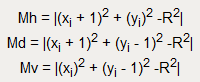
Из рисунка можно заметить, что если угловой коэффициент отрезка из точки (0, 0) больше чем 1/2, то его пересечение с прямой x = 1 будет расположено ближе к прямой y = 1, чем к прямой y = 0. Следовательно, точка растра (1, 1) лучше аппроксимирует ход отрезка, чем точка (1, 0). Если угловой коэффициент меньше 1/2, то верно обратное. Для углового коэффициента, равного 1/2, нет какого-либо предпочтительного выбора. В данном случае алгоритм выбирает точку (1, 1).

Не все отрезки проходят через точки растра.
Изображаемый отрезок
проводится из точки (x1, y1) в точку (x2, y2).
Пусть первая точка находится ближе к
началу координат, тогда перенесем обе
точки, T(x1, y1) так, чтобы начальная точка
отрезка оказалась в начале координат,
тогда конечная окажется в (D x, D y), где D
x= x2- x1 , D y= x2- x1. Уравнение прямой теперь
имеет вид y=x× D y/Dx. Из рисунка следует,
что
![]()
поэтому
![]()
помножим на D x:
![]()
так как D x>0, величину
D x(s-t) можно использовать в качестве
критерия для выбора пиксела. Обозначим
эту величину di :![]()
так как r = xi-1, q = yi-1,
получаем:![]()
Известно, что xi - xi-1=1.
Если di >= 0, то выбираем Ti, тогда
![]()
Если di <0, то выбираем
Si, тогда
![]()
Таким образом, мы получили итеративную формулу для вычисления критерия di.
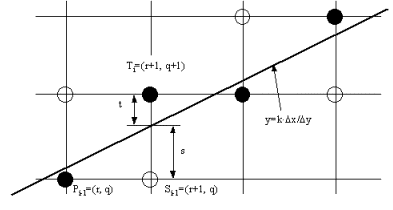
Развёртка эллипса:
В каждой точке (x,y) эллипса существует вектор нормали, задаваемый градиентом функции f. Дугу разобьем на две части: первая - с углом между нормалью и горизонтальной осью больше 45° (тангенс больше 1) и вторая - с углом, меньшим 45°. Движение вдоль дуги будем осуществлять в направлении по часовой стрелке, начиная с точки (0,b). Вдоль всей дуги координата является монотонно убывающей функцией от x, но в первой части она убывает медленнее, чем растет аргумент, а во второй - быстрее. Поэтому при построении растрового образа в первой части будем увеличивать x на единицу и искать соответствующее значение y, а во второй - сначала уменьшать значение y на единицу и определять соответствующее значение x.
Направление нормали соответствует вектору

Отсюда находим тангенс
угла наклона вектора нормали:
![]() .
Приравнивая его единице, получаем, что
координаты точки деления дуги на
вышеуказанные части удовлетворяют
равенству
.
Приравнивая его единице, получаем, что
координаты точки деления дуги на
вышеуказанные части удовлетворяют
равенству
![]() .
Поэтому критерием того, что мы переходим
ко второй области в целочисленных
координатах, будет соотношение
.
Поэтому критерием того, что мы переходим
ко второй области в целочисленных
координатах, будет соотношение
![]() ,
или, переходя к целочисленным операциям,
,
или, переходя к целочисленным операциям,
![]() .
.
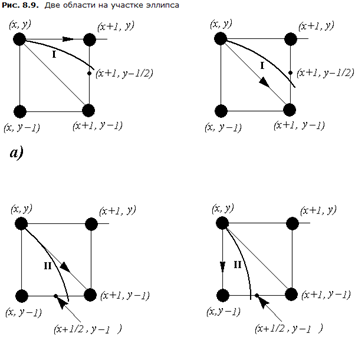
При перемещении вдоль
первого участка дуги мы из каждой точки
переходим либо по горизонтали, либо по
диагонали, и критерий такого перехода
напоминает тот, который использовался
при построении растрового образа
окружности. Находясь в точке (x,y), мы
будем вычислять значение
![]() .
Если это значение меньше нуля, то
дополнительная точка
.
Если это значение меньше нуля, то
дополнительная точка
![]() лежит
внутри эллипса, следовательно, ближайшая
точка растра есть
лежит
внутри эллипса, следовательно, ближайшая
точка растра есть
![]() ,
в противном случае это точка
,
в противном случае это точка
![]() .
.
На втором участке дуги
возможен переход либо по диагонали,
либо по вертикали, поэтому здесь сначала
значение координаты y уменьшается на
единицу, затем вычисляется
![]() и
направление перехода выбирается
аналогично предыдущему случаю.
и
направление перехода выбирается
аналогично предыдущему случаю.
Остается оптимизировать
вычисление параметра
![]() ,
умножив его на 4 и представив в виде
функции координат точки. Тогда для
первой половины дуги имеем
,
умножив его на 4 и представив в виде
функции координат точки. Тогда для
первой половины дуги имеем

Для второй половины дуги получим

>Развертка многоугольников (Домрачев).
Алгоритмы развертки многоугольников заключаются в том, что построчно определяется, лежит ли точка внутри контура или нет. В затравочных алгоритмах используется точка внутри области и от нее идет закраска в стороны.
Для разработки эффективного метода учитывается то, что соседние пикселы, кроме граничных, обладают одинаковыми свойствами. Поэтому контур сканируется снизу вверх построчно и выделяются точки пересечения ребер. Внутренняя часть закрашивается. Т.к. координаты пиксела определяются его нижним левым углом, то, во избежание ошибок, сканирующая строка ищет пересечения с серединами пикселов.
Проблема возникает при пересечении сканирующей строкой вершины. В этом случае необходимо проверить, является ли вершина экстремальной, для этого проверяются координаты смежных ребер и если обе координаты лежат выше или ниже координат вершины, то вершина экстремальна. Если точка экстремальна, то учитывать ее надо дважды, иначе - один раз.
Горизонтальные ребра игнорируются.
Алгоритмы на основе данных суждений называются алгоритмами с упорядоченным списком ребер. Их эффективность зависит от эффективности используемой сортировки.
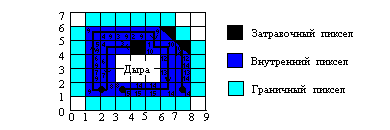
>Алгоритм заполнения гранично-заданных областей. (Домрачев)
В алгоритмах с затравкой известен хотя бы один пиксел из области многоугольника. Алгоритм пытается найти и закрасить все другие пикселы внутри контура. Обычно используется алгоритм со стеком: Взять пиксел из стека. Закрасить. Для соседних 4 пикселов проверить, не является ли он граничным, или не присвоено ли ему уже требуемое значение. Проигнорировать его в любом из этих двух случаев. Иначе поместить в стек.
Есть так же построчный алгоритм: Затравочный пискел извлекается из стека. Интервал заполняется влево и вправо по строке, пока не будет найдена граница. Запоминаются крайний левый и крайний правый пикселы интервала. В этом диапазоне проверяются строки сверху и снизу. Если на них есть незаполненные пикселы, то крайний правый в каждом таком интервале помещается в стек.
Этот алгоритм справляется с дырами.
>Геометрические преобразования. Однородные координаты, композиция преобразований (масштабирование, поворот, перенос на плоскости и в пространстве). (Домрачев)
Однородные координаты ― координаты, обладающие тем свойством, что определяемый ими объект не меняется при умножении всех координат на одно и то же ненулевое число.