

1.Структурный анализ механизма
1.1. Структурная схема механизма
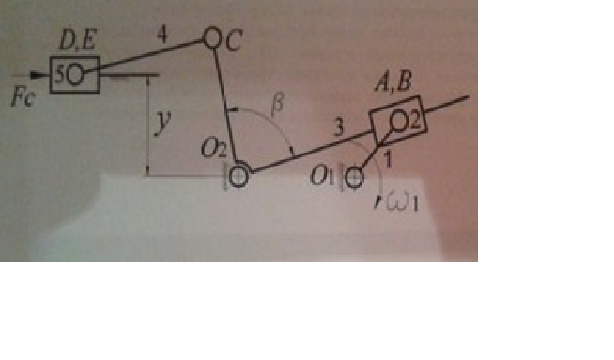
Рис.1.1 Структурная схема механизма
Исследуемый механизм, кинематическая схема, которого приведена на рис. 1.1, а исходные данные указаны в таблице 1.1, служит для преобразования вращательного движения кривошипа 1 (входное звено) в поступательное движение ползуна 5 (выходное звено).
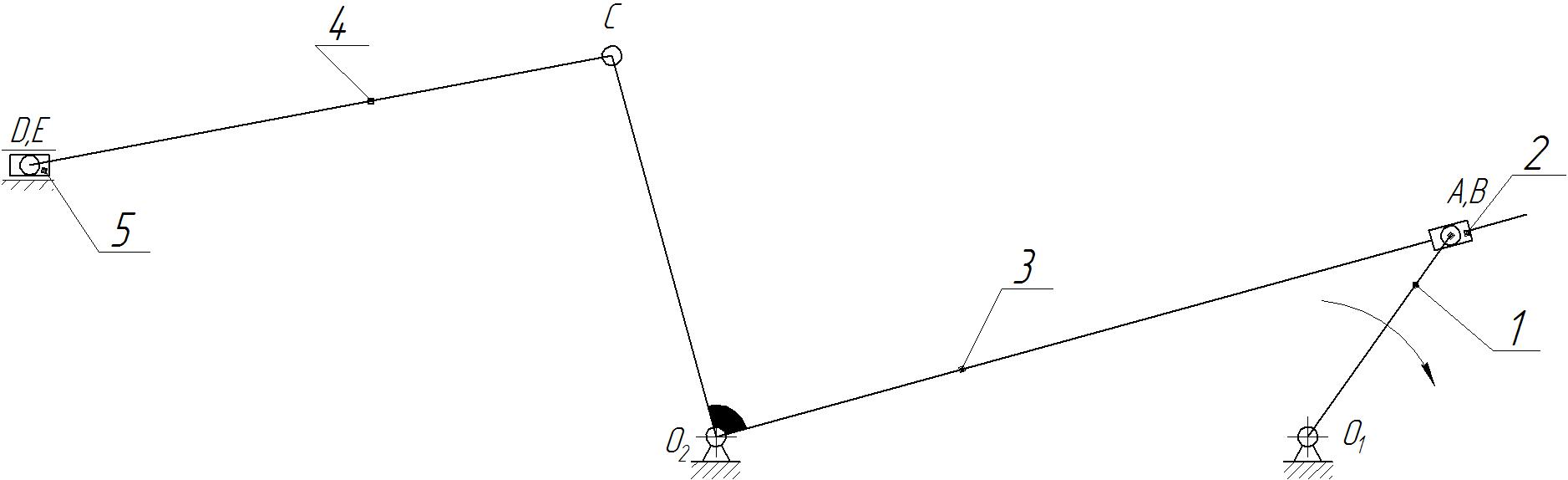
Рисунок 2. 1 – Кинематическая схема механизма
Классификация звеньев
Таблица 1.1
№ |
Название Пары |
Условное обозначение |
Движение |
Особенности |
0 |
Стойка |
|
Отсутствует |
|
1 |
Кривошип |
|
Вращательное |
Полный оборот |
2 |
Кулиса |
|
Сложное |
Возвратно поступательное и вращательное с коромыслом |
3 |
Коромысло |
|
Вращательное |
Неполный оборот |
4 |
Шатун |
|
Сложное |
|
5 |
Ползун |
|
Возвратно-поступательное |
Направляющая неподвижна |
Механизм состоит из 5 звеньев:
0-стойка,
1-кривошип,
2-коромысло,
3-кулиса,
4-шатун,
5-ползун.
 Звенья
механизма образуют между собой следующие
кинематические пары:
Звенья
механизма образуют между собой следующие
кинематические пары:
Классификация кинематических пар механизма
Звенья, образующие кинематические пары |
Обозначение |
Тип движения |
Подвижность |
Вид контакта |
Способ замыкания |
0 - 1 |
O1 |
Вращательное |
1 |
Н |
Г |
1 - 2 |
А |
Вращательное |
1 |
Н |
Г |
2 - 3 |
В |
Поступательное |
1 |
Н |
Г |
3 - 0 |
С |
Вращательное |
1 |
Н |
Г |
3 - 4 |
O2 |
Вращательное |
1 |
Н |
Г |
4 - 5 |
D |
Вращательное |
1 |
Н |
Г |
5 - 1 |
E |
Вращательное |
1 |
Н |
Г |
В состав исследуемого одноподвижного кривошипно-качающейся ползунного механизма входят пять подвижных звеньев и семь кинематических пар пятого класса (p5=7)
1.2 Классификация структурных групп
Разбиваем механизм на группы Асура и определяем их классы, порядки и виды:
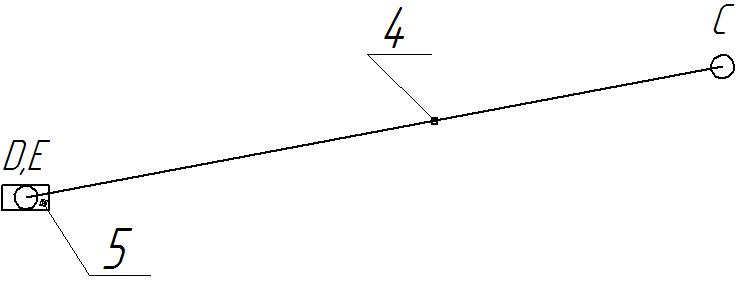
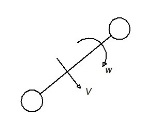
Рисунок 2.2 – Структурная группа 4-5
 Структурная
группа II класса 2 вида
Структурная
группа II класса 2 вида

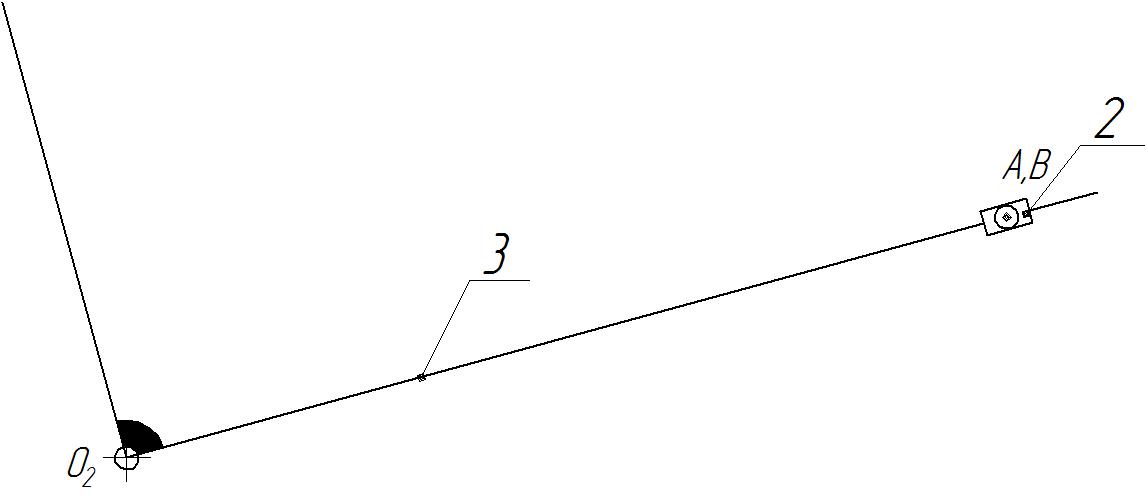
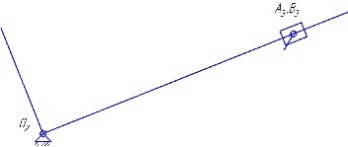
Рисунок 2.3 – Структурная группа 2-3
Структурная группа II класса 3 вида
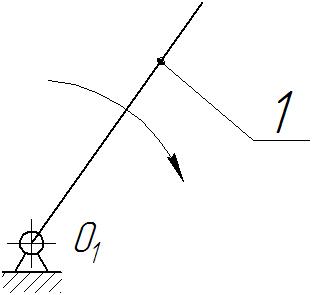
Рисунок 2.4 Начальный механизм первого рода
Класс механизма определятся высшим классом группы Асура, входящей состав этого механизма. Следовательно, данный механизм относится ко второму классу.
1.3 Подвижность механизма
Рассчитаем подвижность сложного механизма по формуле П.Л.Чебышева:

где n - число подвижных звеньев,
p5 - число кинематических пар 5-го класса,
p4 - число кинематических пар 4-го класса.
В данном механизме n=5, p5=7, p4=0. Следовательно,

Так как W=1 то у механизма одно входное звено.
WСМ
=

где j-индекс (порядковый номер) общего звена;
m-число звеньев, соединяющих простые механизмы;
n-число простых механизмов;
i-индекс (порядковый номер) простого механизма;
K- количество механизмов, объединенных j-м звеном.
WСМ = 1+1-(2-1)=1+1-2+1=1
Следовательно, механизм разбит на простые механизмы правильно.