

Раздел 5 использование разновременных лп
5.1 Общий случай решения основной задачи судовождения
Практически все измерения навигационных параметров, которые выполняются для ОМС одним наблюдателем, всегда бывают разновременными. Условно все измерения, выполненные одним наблюдателем в быстрой последовательности считаются одновременными.
При движении судна разновременные измерения выполняются в различных точках и должн6ы быть приведены к одному моменту и месту судна. Однако такое приведение осуществляется переносом изолиний или линий положения е нужному моменту и месту судна лишь по счислению. Неточности счисления при значительных интервалах между измерениями существенно снижает точность переносимых линий и, естественно приводит к снижению точности ОМС.
Указанное выше снижение точности обсерваций при обычных крюйс-методах, заставляло судоводителей искать методы ОМС по разновременным измерениям, которые дают место судна независимое от ошибок счисления. Частные случаи такого решения задач под названием исправленного и двойного крюйс-пеленга давно и успешно применялись на флоте. Решение задачи в общем виде было предложено академиком А.Н. Крыловым и впервые с достаточным теоретическим обоснованием приведено в [10. –С. 509 - 539]. Как это так и другие навигационные пособия [1],[3],8] рассматривают общее решение задачи очень усложненно или чрезвычайно упрощенно. Наиболее полно и просто решение задачи для любых условий измерений приведено в [7], где по методике М.Н. Андреева показано решение основной задачи судовождения с помощью сопутствующих линий положения (СЛП).
Основной задачей судовождения является не только ОМС, но также определение элементов движения судна , о чем говорилось в первом разделе данного конспекта. Иными словами, в наиболее общем виде основною задачей судовож
дения является определение места судна, направления и скорости его перемещения по земной поверхности.
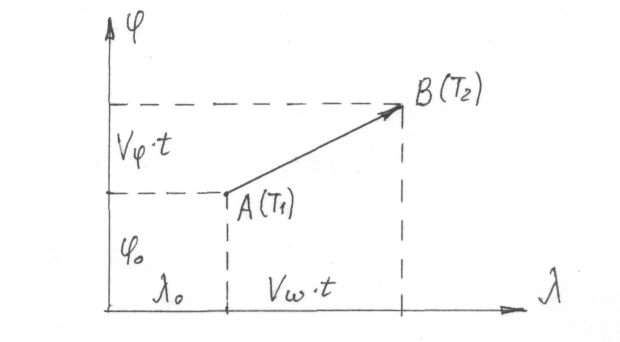
Уравнение равномерного и прямолинейного движения судна в прямоугольной системе координат и при известных скорости и интервале времени t запишется так:
=о+t =о+•t , (5.1)
где та - проекции вектора движения судна на координатные оси за промежуток времени t.
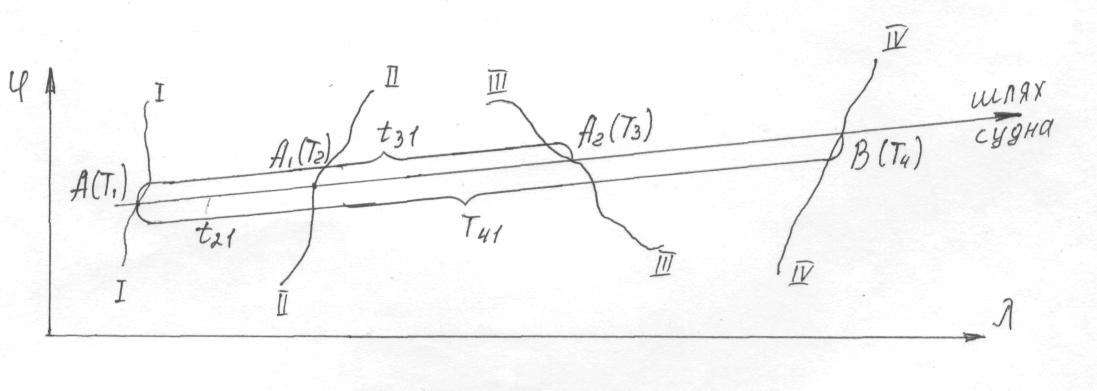
По уравнению (5.1) видно что для решения задачи необходимо знать четыре величины: координаты начала движения величину и направление вектора движения судна или его проекции на координатные оси. Для решения необходимо как минимум четыре уравнения. В общем случае это могут быть уравнения четырех изолиний с параметрами U1, U2, U3 ,U4,, которые должны быть разновременными. Они имеют вид:
U1=f1(1, 1
U2=f2(2, 2
U3=f3(3, 3
U4=f4(4, 4
Выразив текущие координаты через начальные и их приращения на протяжении интервала t, получим уравнения изолиний:
U1=f1(0, 0)
U2=f2(0+t21; 0+t21)
U3=f3(0+t31; 0+t31)
U4=f4(0+t41; 0+t41),
Где t21=T2-T1, t31=T3-T1; t41=T4-t1
Решения этих уравнений относительно неизвестных величин в общем виде приведет к уравнениям:
(U1, U2, U3, U4, t21, t31, t41)=K1
2(U1, U2, U3, U4, t21, t31, t41)=K2
3(U1, U2, U3, U4, t21, t31, t41)=К3 (5.2)
4(U1, U2, U3, U4, t21, t31, t41)=K4
Текущие координаты места судна на любой момент времени с учетом уравнений (5.1) прнимают вид:
t
24t
Непосредственное решение уравнений (5.2) при достаточно сложных функциональных зависимостях f1, f2, f3, f4 , а также и уравнений изолиний, представля
ет трудную задачу даже при использовании вычислительной техники. Геометрический смысл определения линии равномерного и прямолинейного движения судна, деленного на отрезки пропорциональные интервалам времени t21, t31, t41 Показаны ниже.
Графоаналитическое решение основной задачи судовождения разработанное до практического применения в условиях ходового мостика пока что только для условий равномерного прямолинейного движения судна. Исследования по теоретическому и практическому обоснованию решения основной задачи судовождения при неравномерному и криволинейному движении судна ожидают своих авторов.