

Вопросы для защиты задачи
1. Какое движение твердого тела называется поступательным и какими свойствами оно обладает?
2. Какое движение твердого тела называется вращением вокруг неподвижной оси и как оно задается?
3.Дайте определения угловой скорости и углового ускорения.
4.Как определить вращательную скорость точки при вращении тела?
5.Как определяются вращательное и центростремительное ускорения при вращении тела?
Задача 4. Определение кинематических характеристик плоского движения
Кривошип OA длиной 0,2 м вращается равномерно с угловой скоростью ωOA = 10 с–1 и приводит в движение шатун АВ длиной 1 м. Ползун В движется по вертикали. Найти угловую скорость и угловое ускорение шатуна, а также скорость и ускорение ползуна в момент, когда кривошип и шатун взаимно перпендикулярны и образуют с вертикалью угол 45° (рисунок 16.1).
Решение.
1. Определение скоростей. Вычислим скорость точки А как точки вращающегося кривошипа:
 .
.
Она направлена перпендикулярно ОА (рисунок 17.1).
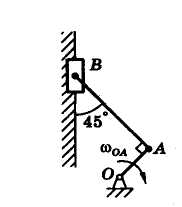
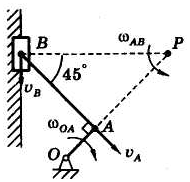
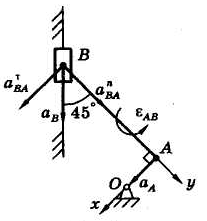
Рисунок 16.1 Рисунок 17.1 Рисунок 18.1
Скорость vB ползуна направлена по направляющей вертикально.
Для шатуна АВ, совершающего плоское движение, теперь известны направления скоростей двух его точек: А и В. Восставляя перпендикуляры к векторам этих скоростей, находим точку Р их пересечения — МЦС шатуна.
Используя
известную формулу для скоростей точек
при плоском движении, получаем
 ;
;
 .
.
Из
треугольника АВР
имеем |АР|
= 1 м;
|ВР|
=
 м,
и тогда
м,
и тогда
 .
.
2.
Определение
ускорений.
Вычислим сначала ускорение точки А
как точки кривошипа:
 .
.
Здесь
вращательное ускорение
 ,
так как
,
так как
 ,
поскольку
,
поскольку
 .
.
Тогда полное ускорение точки А равно центростремительному

и направлено к оси вращения — точке О (рисунок 18.1).
Для вычисления ускорения точки В воспользуемся теоремой о сложении ускорений, взяв точку А в качестве полюса:
 .
(1)
.
(1)
Центростремительное
ускорение точки В
в
относительном вращении вокруг точки
А
по модулю равно
 ,
и направлено от точки В
к полюсу — точке А.
,
и направлено от точки В
к полюсу — точке А.
Модуль
вращательного ускорения
 определяется по формуле
определяется по формуле
 и пока не может быть вычислен, поскольку
неизвестна величина углового ускорения
и пока не может быть вычислен, поскольку
неизвестна величина углового ускорения
 .
Направление вектора
.
Направление вектора
 также не может быть определено
однозначно, так как неизвестно направление
углового ускорения, т. е. неизвестно,
ускоренным или замедленным является
поворот шатуна. Примем пока этот поворот
ускоренным, тогда направление
также не может быть определено
однозначно, так как неизвестно направление
углового ускорения, т. е. неизвестно,
ускоренным или замедленным является
поворот шатуна. Примем пока этот поворот
ускоренным, тогда направление
 совпадет с направлением
совпадет с направлением
 ,
а вектор
направим перпендикулярно отрезку
ВА
по ходу углового ускорения.
,
а вектор
направим перпендикулярно отрезку
ВА
по ходу углового ускорения.
Вектор
ускорения точки В
направлен по вертикальной прямолинейной
направляющей. Будем пока считать
движение ползуна ускоренным и направим
ускорение
 в ту же сторону, что и скорость
в ту же сторону, что и скорость
 (рисунок 17.1, 18.1).
(рисунок 17.1, 18.1).
Теперь в равенстве (1) все ускорения имеют определенное направление, и мы можем записать это уравнение в проекциях на выбранные оси:
 .
.
Из
последнего уравнения получаем
 ,
тогда из первого уравнения
,
тогда из первого уравнения
 .
.
Отсюда следует, что
 .
.
Отрицательные знаки у величин и показывают, что их истинные направления противоположны принятым.
№ вар. |
ОА |
АВ |
α |
ωOA |
1 |
0,5 |
1,1 |
45 |
10 |
2 |
0,4 |
1,2 |
45 |
11 |
3 |
0,3 |
1,3 |
45 |
12 |
4 |
0,2 |
1,4 |
45 |
13 |
5 |
0,95 |
1,5 |
45 |
14 |
6 |
0,85 |
1,6 |
45 |
15 |
7 |
0,75 |
1,7 |
45 |
16 |
8 |
0,65 |
1,8 |
45 |
17 |
9 |
0,55 |
1,9 |
45 |
18 |
10 |
0,45 |
2 |
45 |
19 |
11 |
0,35 |
1,1 |
45 |
20 |
12 |
0,25 |
1,2 |
45 |
21 |
13 |
0,9 |
1,3 |
45 |
22 |
14 |
0,8 |
1,4 |
45 |
23 |
15 |
0,7 |
1,5 |
45 |
24 |
16 |
0,6 |
1,6 |
45 |
25 |
17 |
0,5 |
1,7 |
45 |
26 |
18 |
0,4 |
1,8 |
45 |
27 |
19 |
0,3 |
1,9 |
45 |
28 |
20 |
0,2 |
1,9 |
45 |
29 |