

1.3 Классификация механизмов
Механизмы, входящие в состав любой машины или прибора, весьма разнообразны. По функциональному назначению они делятся на следующие виды: механизмы двигателей и преобразователей; передаточные механизмы; исполнительные механизмы; механизмы настройки, подачи, транспортирования; механизмы управления, контроля и регулирования.
Механизмы решают задачи преобразования одних видов движений в другие, например вращательного в поступательное, и задачи изменения скорости при сохранении вида движения, например уменьшение числа оборотов двигателя до числа оборотов основного ведомого (рабочего) звена. В последнем случае одним из основных параметров механизма является передаточное отношение i, которое определяется как отношение угловых скоростей ведущего и ведомого звеньев механизма. Если механизм служит для понижения угловой скорости, его называют редуктором, если для повышения, — мультипликатором.
Механизмы, служащие для передачи вращательного движения с преобразованием скорости (фрикционные, зубчатые), называют передачами.
В зависимости от конструктивных особенностей и способа передачи движения между подвижными звеньями механизмы делят на шарнирно-рычажные, фрикционные, зубчатые, кулачковые, винтовые, с гибкими звеньями. Рассмотрим подробнее механизмы названных видов, учитывая их кинематические свойства и конструктивные особенности.
В шарнирно-рычажных механизмах жесткие звенья типа стержней, рычагов соединяются вращательными и поступательными кинематическими парами. Шарнирно-рычажные механизмы применяются для преобразования вращательного или поступательного движения в любое движение с требуемыми параметрами. Наибольшее распространение получили плоские четырехзвенные механизмы с тремя подвижными и одним неподвижным звеньями. «Родоначальником» этой группы является шарнирный четырехзвенник (рис. 1.6), служащий для преобразования равномерного вращения ведущего звена 1 в неравномерное вращение звена 3. Звенья 1 и 3 называются кривошипами, если они поворачиваются на угол более 2π, и коромыслами, если совершают качательное движение. Звено 2, совершающее плоское движение, называют шатуном. В зависимости от соотношения длин звеньев механизма рабочее звено 3 может быть кривошипом или коромыслом.
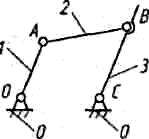
Рис. 1.6
Фрикционные механизмы используются в приводах систем, устройствах транспортирования различных носителей информации. Передача движения в них осуществляется за счет сил трения между звеньями.
Фрикционные механизмы разнообразны по конструкции. Различают фрикционные передачи с постоянным (рис. 1.7, а, б) и переменным передаточным отношением (вариаторы) (рис. 1.7, в), твердыми (жесткими) звеньями и гибкой связью (рис. 1.7, г).
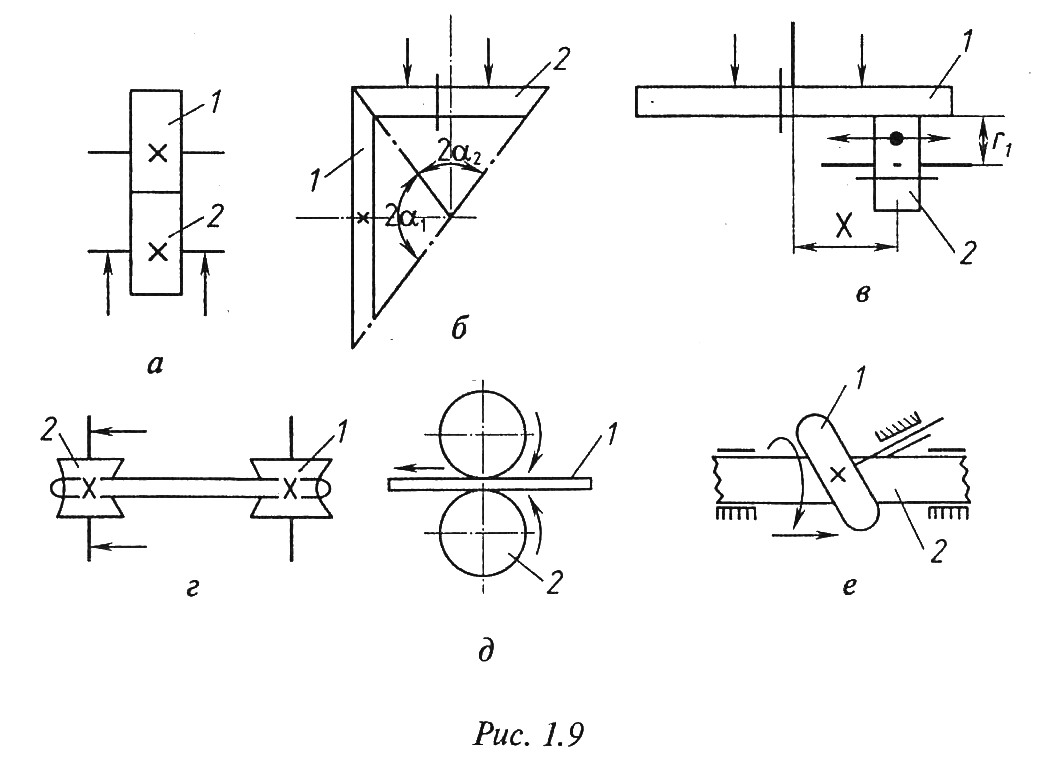
Рис. 1.7
По относительному расположению осей звеньев различают передачи с параллельными (рис. 1.7, а) и пересекающимися (рис. 1.7, б) осями. Фрикционные передачи служат для преобразования вращательного движения ведущего звена во вращательное с другой скоростью (рис. 1.7, а - в), прямолинейное (рис. 1.7, д) или винтовое движение ведомого звена (рис. 1.7, е).
Кроме бесступенчатого изменения скорости ведомого звена к достоинствам фрикционных механизмов относятся простота конструкции, автоматическое предохранение от поломок при перегрузках, плавность передачи движения. К недостаткам рассматриваемых механизмов следует отнести непостоянство передаточного отношения из-за проскальзывания, наличие усилия, сжимающего катки, и усиленный в связи с этим износ звеньев.
Зубчатые механизмы получили наибольшее распространение благодаря ряду достоинств — компактности, высокому КПД, надежности работы, простоте ухода, возможности применения в широком диапазоне скоростей и передаточных отношений, сохранению с большой точностью заданного передаточного отношения. Передача движения в них осуществляется зацеплением зубьев подвижных звеньев — зубчатых колес. Недостатки зубчатых механизмов — сложность и высокая точность изготовления и сборки звеньев, шум при больших окружных скоростях колес.
Зубчатые передачи служат для изменения скорости вращательного движения (рис. 1.8, а—д), преобразования возвратно-вращательного движения в возвратно-поступательное, и наоборот (рис. 1.8, е).
Простейший одноступенчатый зубчатый механизм состоит из стойки и двух подвижных звеньев — зубчатых колес. Колеса образуют со стойкой вращательные пары 5-го класса, а друг с другом — высшую кинематическую пару 4-го класса, называемую зубчатым зацеплением.
По характеру относительного расположения осей вращения зубчатых колес различают передачи с параллельными (рис. 1.8, а), пересекающимися (рис. 1.8, б) и перекрещивающимися в пространстве осями (рис. 1.8, в).
По виду зацепления или характеру расположения зубьев на теле зубчатых колес различают передачи с внешним (рис. 1.8, а) и внутренним (рис. 1.8, д) зацеплением. При внешнем зацеплении колеса с параллельными осями вращаются в разные стороны, при внутреннем — в одну.
Зубчатые передачи могут быть с постоянным и переменным передаточным отношением. Применяют их для понижения и повышения угловой скорости. В зависимости от назначения передачи и специфических требований (износостойкость, бесшумность) зубья колес могут быть прямыми, косыми, шевронными и криволинейными. Зубчатые механизмы можно классифицировать еще по числу подвижных звеньев, профилю боковых поверхностей зубьев и другим признакам. По профилю зуба различают эвольвентные, циклоидные, часовые, цевочные передачи, передачи Новикова и др. Наиболее широкое применение получили эвольвентные передачи благодаря простоте технологии изготовления, большой кинематической точности, малой чувствительности к изменению межосевого расстояния.
В особую группу зубчатых передач можно выделить эпициклические передачи, основным признаком которых является наличие колес с подвижными геометрическими осями (рис. 1.8, г). Колеса 1, 3, имеющие неподвижные геометрические оси, называют центральными, колесо 2 с подвижной геометрической осью — сателлитом; звено Н, вращающее оси сателлитов, — водилом. Эпициклические передачи, имеющие одну степень подвижности, называются планетарными, а две — дифференциальными. Рассматриваемые передачи позволяют «снимать» с одного вала движения с различными скоростями, что широко используется в шкальных механизмах. Эпициклические передачи при малых габаритах позволяют получать большие передаточные отношения.
Кулачковые механизмы широко применяются в устройствах управления, прерывистого движения. Простейший кулачковый механизм (рис. 1.9, а) состоит из кулачка 1, толкателя 2, стойки и образует в точке А высшую кинематическую пару 4-го класса. Ведущее звено 1 называется кулачком или эксцентриком. Форма профиля кулачка определяется законом движения толкателя и может быть самой разнообразной, как и закон движения ведомого звена. Кулачковые механизмы позволяют получать любой закон движения ведомого звена, отличаются простотой, компактностью, малыми габаритами.
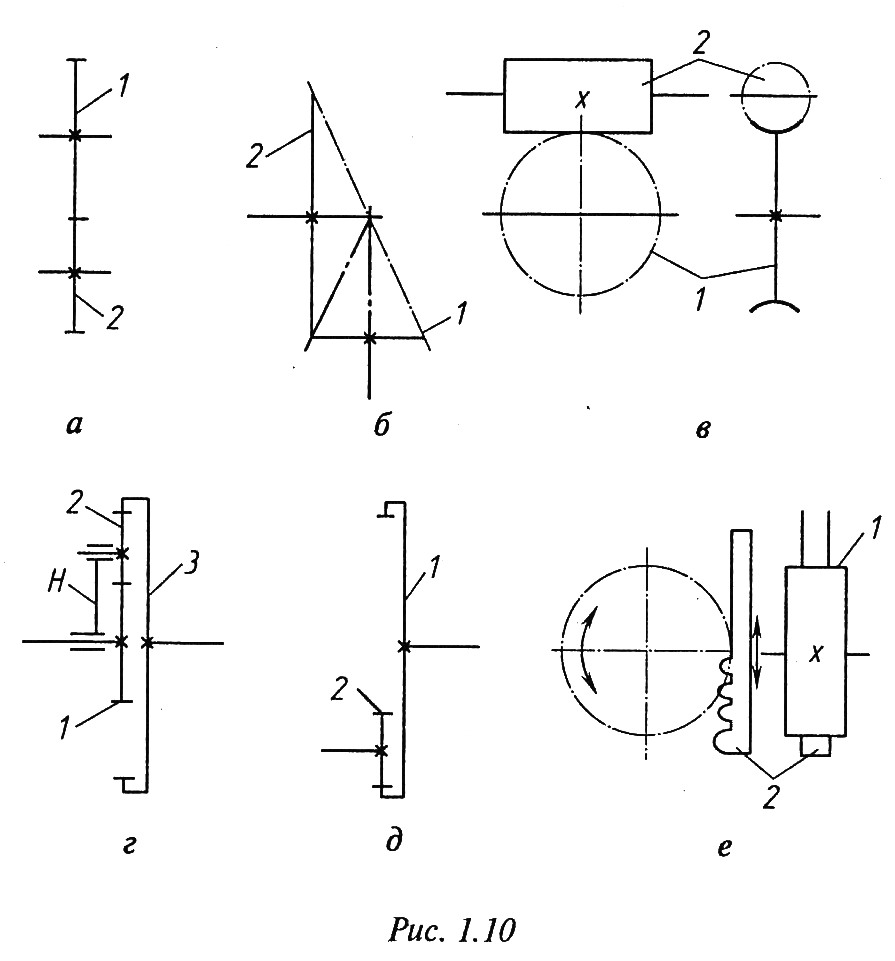
Рис. 1.8
К недостаткам кулачковых механизмов следует отнести большие удельные давления в высшей паре и, следовательно, недолговечность механизма, а
также необходимость в силовом замыкании звеньев. Возможно геометрическое замыкание с помощью пазов в кулачке, который направляет движение ведомого звена.
Величина перемещений и закон движения рабочего звена механизма определяются профилем кулачка.
По
виду преобразуемых движений кулачковые
механизмы можно разделить на следующие
группы: механизмы, в которых вращательное
движение кулачка 1
преобразуется
в возвратно-поступательное или
качательное движение толкателя 2
(рис. 1.9, а
и б
соответственно);
механизмы, в которых возвратно-поступательное
движение кулачка 1
преобразуется
в возвратно-поступательное или качательное
движение толкателя 2
(рис. 1.9, виг
соответственно); пространственные,
или коноидные, кулачковые механизмы,
решающие функции двух переменных,
например
![]() (рис. 1.9, д).
Эти механизмы имеют две степени
свободы. Применяются они в передающих
устройствах.
(рис. 1.9, д).
Эти механизмы имеют две степени
свободы. Применяются они в передающих
устройствах.
Толкатели кулачковых механизмов в зависимости от вида кинематического элемента толкателя подразделяются на точечные (рис. 1.9, д), плоские и тарельчатые (рис. 1.9, а), с профилем, очерченным по радиусу или сфере, роликовые и шариковые (рис. 1.9, в и г соответственно).
Винтовые механизмы состоят из винта и гайки и предназначены для преобразования вращательного движения в прямолинейное, и наоборот. Они обеспечивают высокую точность поступательных перемещений, большой выигрыш в силе. Недостатки — большие потери на трение в паре винт — гайка, низкий КПД. Применяются винтовые механизмы в измерительных приборах, механизмах точных перемещений, регулирования и настройки, в подъемно-транспортных устройствах.
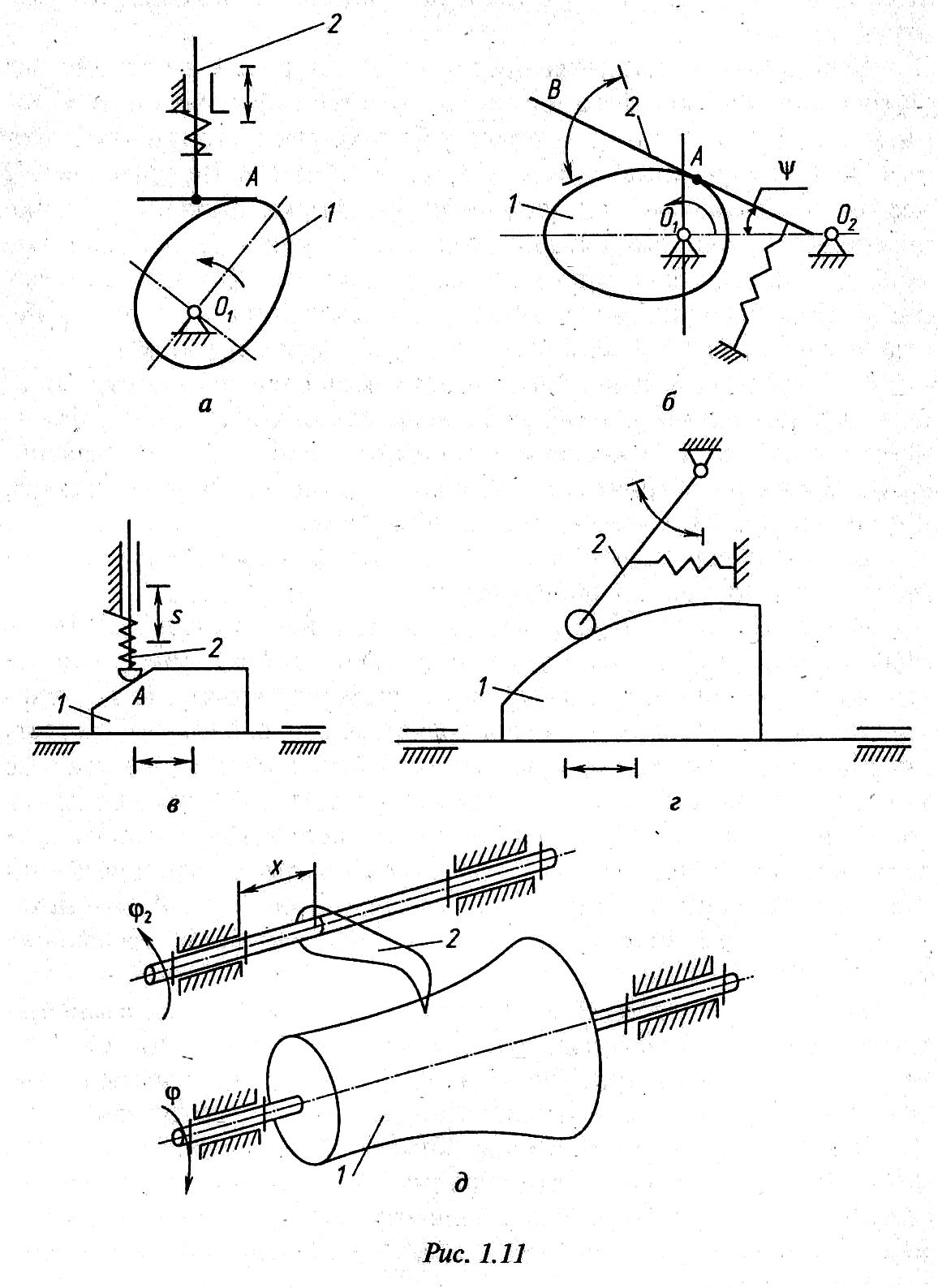
Рис. 1.9
При вращении винта 1 (рис. 1.10) гайка 2 поступательно перемещается в направляющих стойки 3. Возможно использование схемы, в которой ведущим звеном является зафиксированная в осевом направлении вращающаяся гайка, а ведомым — винт, движущийся поступательно в направляющих стойки.
Имеются конструкции кинематической пары винт — гайка с трением скольжения и трением качения.

Рис. 1.10
Механизмы с гибкими звеньями применяют для передачи вращательного движения между валами при больших межосевых расстояниях и для преобразования вращательного движения в поступательное, и наоборот. Ведущее и ведомое жесткие звенья таких механизмов непосредственно не контактируют друг с другом, а передача движения осуществляется посредством гибкого звена, которое может быть как замкнутым, так и разомкнутым.
По характеру соединения гибкого звена с ведущим и ведомым звеньями рассматриваемые механизмы подразделяют на передачи трением, передачи зацепления и передачи с жестким креплением гибкого звена к другим звеньям.
В передачах трением в качестве гибкого звена используют плоские и клиновидные ремни, пассики, круглые шнуры и ремни, нити (рис. 1.11, а). Передача состоит из ведущего 1 и ведомого 2 шкивов, а также замкнутого звена 3, надетого на шкивы с натяжением. Таким передачам присущи все достоинства и недостатки фрикционных механизмов непосредственного касания. Необходимым условием нормальной работы передачи трением является натяжение гибкого звена, что достигается обычно с помощью натяжного ролика 4.
В передачах зацепления гибким звеном служит зубчатый ремень, перфорированная лента, цепь (рис. 1.11, б). Преимущества этих передач перед передачами трением соответствуют преимуществам зубчатых передач по отношению к фрикционным.
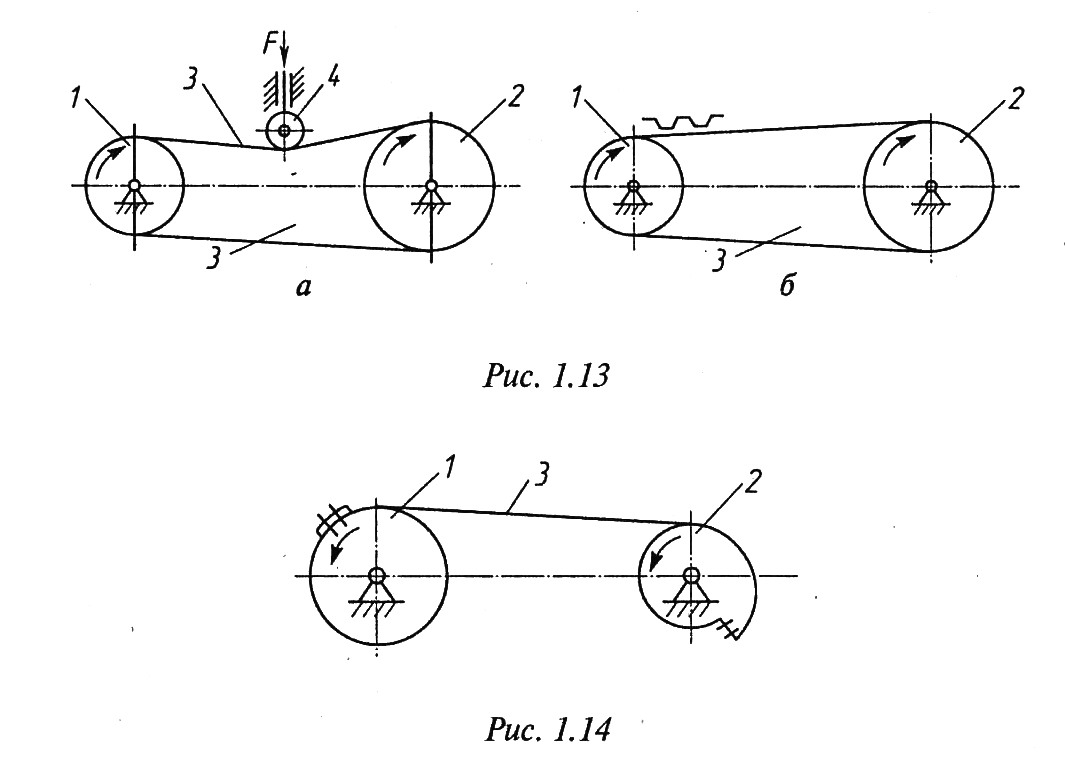
Рис. 1.11