

15. Линии влияния изгибающего момента и поперечной силы в балке.
Линия влияния изгибающего момента в данном сечении.
Изгибающий
момент в данном сечении балки равен
сумме моментов внешних сил, приложенных
к отсеченной части балки, относительно
центров тяжести сечения. При движении
груза справа от сечения (рис. 29, а)
в сумму моментов левых сил войдет только
левая реакция, а при движении груза
слева от сечения в эту сумму моментов
следует включить и момент от груза.
Таким образом, имеем два отличных друг
от друга аналитических выражения для
изгибающего момента. Рассмотрим движение
груза справа от сечения, когда х
меняется
от аk
до l.
Составляя сумму моментов левых сил при
грузе справа от сечения,получаем:

Рассмотрим
теперь движение груза Р = 1 слева от
сечения, т. е. когда х меняется от 0 до
ak.
Определяем изгибающий момент Мk
по
правым силам получим: т.
е. закон изменения изгибающего момента
при движении груза слева от сечения
получается как закон правой реакции В
(далее строим л. вл.М см. рис.)
т.
е. закон изменения изгибающего момента
при движении груза слева от сечения
получается как закон правой реакции В
(далее строим л. вл.М см. рис.)
Линия
влияния поперечной силы Qk.
Аналогично
строится линия влияния поперечной силы
алгебраической суммы сил, приложенных
к отсеченной части балки относительно
сечения) с рассмотрением двух положений
груза. Если груз движется справа от
сечения, поперечная сила равна опорной
реакции А. Qk
=
A.
(3.5)  Правая
ветвь линии влияния Qk
получается
по закону изменения опорной реакции А.
Этот закон справедлив, очевидно, лишь
для участка изменения х от ak
до
l
.
Если груз движется слева от сечения,
поперечная сила равна реакции В с
обратным знаком, т. е. левая ветвь линии
влияния поперечной силы получается по
закону изменения правой опорной реакции
В, взятой с обратным знаком. Линию (–В)
используем только на участке оси балки
с абсциссами от 0 до аk.(см.рис).
Правая
ветвь линии влияния Qk
получается
по закону изменения опорной реакции А.
Этот закон справедлив, очевидно, лишь
для участка изменения х от ak
до
l
.
Если груз движется слева от сечения,
поперечная сила равна реакции В с
обратным знаком, т. е. левая ветвь линии
влияния поперечной силы получается по
закону изменения правой опорной реакции
В, взятой с обратным знаком. Линию (–В)
используем только на участке оси балки
с абсциссами от 0 до аk.(см.рис).
18.Определение усилий по линиям влияния от постоянной временной нагрузки.
Теория
л. вл. позволяет определить усилия от
подвиж и неподвиж нагрузок. Простейшей
явл. сосредоточеная сила. Внутренние
усилия : изгиб. момент от этой нагрузки
опред. след. образом. М=Ру(3.1) . Если
приложеная система сосред. сил , то
усилие по л. вл. вычесляется: М= . (3.2).Распредиленная нагрузка: P=q*L
, M=P*y=q*L*
. (3.2).Распредиленная нагрузка: P=q*L
, M=P*y=q*L* ,
M=q*ω(3.3),
M=q*(
,
M=q*ω(3.3),
M=q*( .
Усилие по л. вл. от сосред. момента
опред.:Q=m*
.
Усилие по л. вл. от сосред. момента
опред.:Q=m* ,
,
 .
Выражение (3.1)-(3.5) опред. усилия от
различных нагрузок . В случае если мы
имеем систему различных нагрузок ,
усилия по л. вл. опред. следующим образом
: R=
(4.1), R=
.
Выражение (3.1)-(3.5) опред. усилия от
различных нагрузок . В случае если мы
имеем систему различных нагрузок ,
усилия по л. вл. опред. следующим образом
: R=
(4.1), R= (4.2),
R=
(4.2),
R= (4.3).
Если внешняя нагрузка предстовл. всеми
силовыми факторами , искомая величина
R
опред. сумированием (4.1)-(4.3).
(4.3).
Если внешняя нагрузка предстовл. всеми
силовыми факторами , искомая величина
R
опред. сумированием (4.1)-(4.3).
19.
Загружение линий влияния на экстремум
равномерно распределенной нагрузки.
Построив
линию влияния М нагружаем ее временной
нагрузкой.
 .
Расположив распред нагрузку только
над полож участками находим:
.
Расположив распред нагрузку только
над полож участками находим:
 ;
;
 ;
отриц:
;
отриц:
 .
Рассчитаем прочность на времен нагрузку
.
Рассчитаем прочность на времен нагрузку
 – нормальн напряж используются в условии
прочности. W
– момент сопротивления.
– нормальн напряж используются в условии
прочности. W
– момент сопротивления.
16. Кинематический метод построения линий влияния
Кин. метод основан на принципе возможных перемещений.
Методика построения л.вл.
Отбрасываем опору RB.
Заменяем опору реакций полож. напр.
Задаем полученный мех-зм возм. перемещений так, чтобы реакция совершала положительную работу. Отклоненное положение механизма есть линия в некотором масштабе.

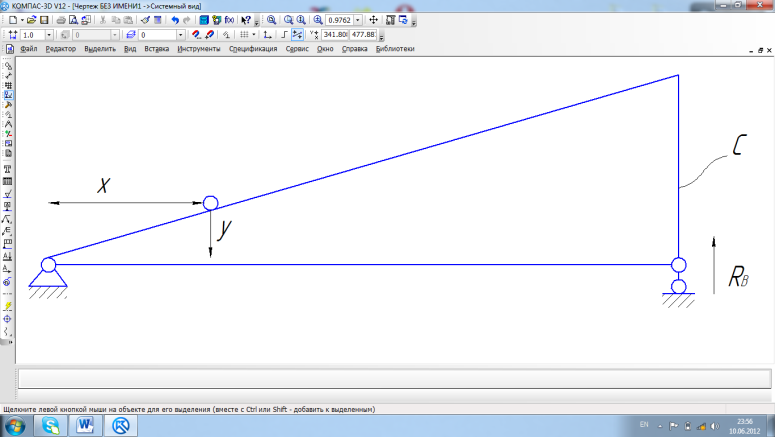



C-масштаб
при С=1 RB=y
В
 водим
в сечение 1 шарнир. Приложенный моменты
положительны
водим
в сечение 1 шарнир. Приложенный моменты
положительны



Лин. вл. Q.
В ведем
связь непрепятствующую верт. перем.
сечений (шарнирно-стержневой паралелограм).
ведем
связь непрепятствующую верт. перем.
сечений (шарнирно-стержневой паралелограм).
П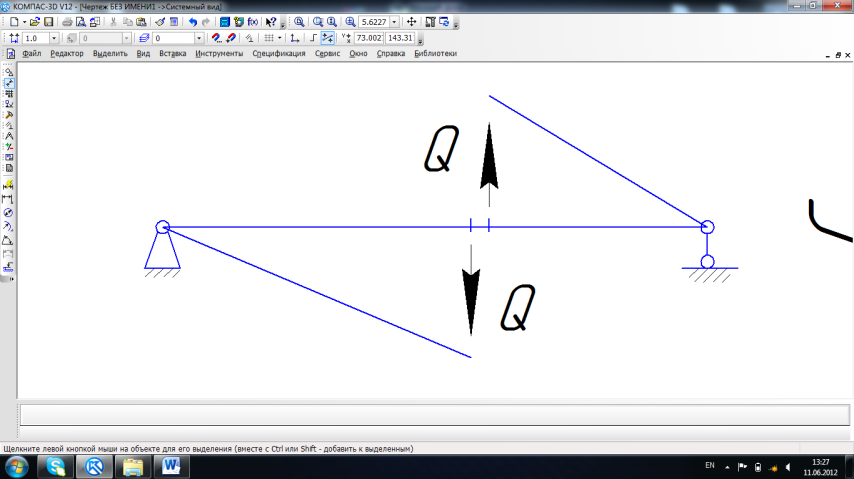
 ри
построении л.вл. кин. методом необходимо
строго соблюдать порядок построения.
Полученные ординаты имеют след. знаки:
выше оси «+», ниже оси «-». Характерные
ординаты л.вл. (RA,
RB,
над опорами; M
и Q
под рассм. сечением) опр. на осн. уравнений
статики. Каждая из ординат л.вл.
опр.рассматриваемую величину, когда
единичный груз находится над этой
ординатой.
ри
построении л.вл. кин. методом необходимо
строго соблюдать порядок построения.
Полученные ординаты имеют след. знаки:
выше оси «+», ниже оси «-». Характерные
ординаты л.вл. (RA,
RB,
над опорами; M
и Q
под рассм. сечением) опр. на осн. уравнений
статики. Каждая из ординат л.вл.
опр.рассматриваемую величину, когда
единичный груз находится над этой
ординатой.