

4.2.2. Измерительные устройства незамкнутых автоматических
систем
Измерительное устройство таких систем, т.е. систем, работающих на принципе компенсации возмущающих воздействий, не измеряет управляемую величину. Вместо этого измеряются возмущения и управляющий фактор. Измерение возмущений позволяет выработать сигнал заданного значения управляющего фактора, при котором управляемая величина изменяется нужным образом при изменении внешних условий.
Сравнение заданного и действительного значений управляющего фактора дает возможность выработать первичный сигнал управления, обеспечивающий компенсацию нежелетального изменения управляемой величины.
Поясним структуру такого измерительного устройства автоматической системы управления частотой вращения ротора ТРД. (см. слайд 8.2).
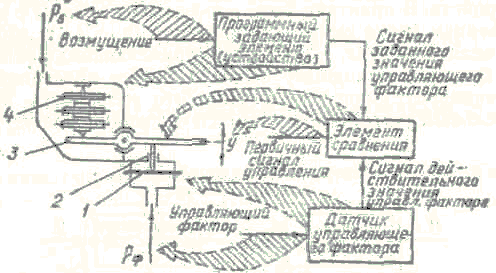
Слайд 8.2
Устройство измеряет
только одно возмущение – полное давление
воздуха на входе в компрессор
 .
Величина этого давления определяет
силу воздействия пакета анероидных
коробочек на рычаг (3). В качестве
заменителя управляющего фактора
замеряется давление топлива перед
форсунками камеры сгорания
.
Величина этого давления определяет
силу воздействия пакета анероидных
коробочек на рычаг (3). В качестве
заменителя управляющего фактора
замеряется давление топлива перед
форсунками камеры сгорания
 .
Это давление характеризует сам фактор
– расход топлива – и легко измеряется.
Сила, определяемая давлением, через
мембрану (4) и толкатель также передается
на рычаг. Положение рычага “у”
однозначно зависит от соотношения
указанных сил.
.
Это давление характеризует сам фактор
– расход топлива – и легко измеряется.
Сила, определяемая давлением, через
мембрану (4) и толкатель также передается
на рычаг. Положение рычага “у”
однозначно зависит от соотношения
указанных сил.
Измерительное устройство можно расчленить на программный задающий элемент (устройство) (ПЗУ), датчик управляющего фактора (ДУФ) и элемент сравнения (ЭС). ПЗУ преобразует в соответствии с заложенной в нём программой возмущение в сигнал заданного значения управляющего фактора. Это, по сути дела, датчик заданного значения управляющего фактора. ДУФ выдаёт сигнал действительного значения управляющего фактора. Элемент сравнения вырабатывает первичный сигнал управления, определяемый разностью этих сигналов.
В.3. Измерительные устройства с выходным сигналом в виде
линейного перемещения
В.3.1. Центробежное механическое измерительное устройство
частоты вращения
Структуру и принцип работы такого устройства мы уже рассмотрели в предыдущем вопросе лекции.
Рассмотрим теперь статическую характеристику центробежного измерительного устройства.
На установившихся режимах в осевом направлении на шток, кроме сил С и , другие силы не действуют. При этом С = .
Приведенная центробежная сила С пропорциональна квадрату частоты вращения и зависит от координаты “у”, так как от “у” зависит радиус центра тяжести грузиков.
 (1), где
(1), где
 -
коэффициенты, постоянные для каждого
устройства.
-
коэффициенты, постоянные для каждого
устройства.
Сила упругости
пружины
зависит от жёсткости пружины
 ,
координаты “у”
и затяжки пружины от задающего воздействия
со стороны летчика
,
координаты “у”
и затяжки пружины от задающего воздействия
со стороны летчика
 (2)
, где
(2)
, где
 - сила предварительной
затяжки пружины.
- сила предварительной
затяжки пружины.
Приравнивая выражения (1) и (2) получим уравнение связи между координатой “у” и частотой вращения.
 (3)
(3)
Функция
 (3) является нелинейной и имеет вид (слайд
8.3).
(3) является нелинейной и имеет вид (слайд
8.3).

При

 .
.
Рабочее
поле характеристик измерительного
устройства ограничивается максимальным
и минимальным отклонениями штока от
центрального положения ( ).
Это обеспечивается конструктивными
упорами. Перемещение координаты h
также
ограничивается кинематически (
).
Это обеспечивается конструктивными
упорами. Перемещение координаты h
также
ограничивается кинематически ( ).
Этим достигается ограничение рабочего
поля характеристик слева и справа.
).
Этим достигается ограничение рабочего
поля характеристик слева и справа.