

Слайд 14.4
Реакция автоматических систем на типовые задающие воздействия и установившиеся ошибки
Статическая
система ( |
Астатическая система |
||||
|
|
||||
Установившаяся ошибка |
Реакция системы |
Установивша-яся ошибка |
Реакция системы |
Установивша-яся ошибка |
Реакция системы |



|
|
|
|
|
|



|
|
|
|
|
|
|
|
|
|
|
|
 )
)











Слайд 14.5
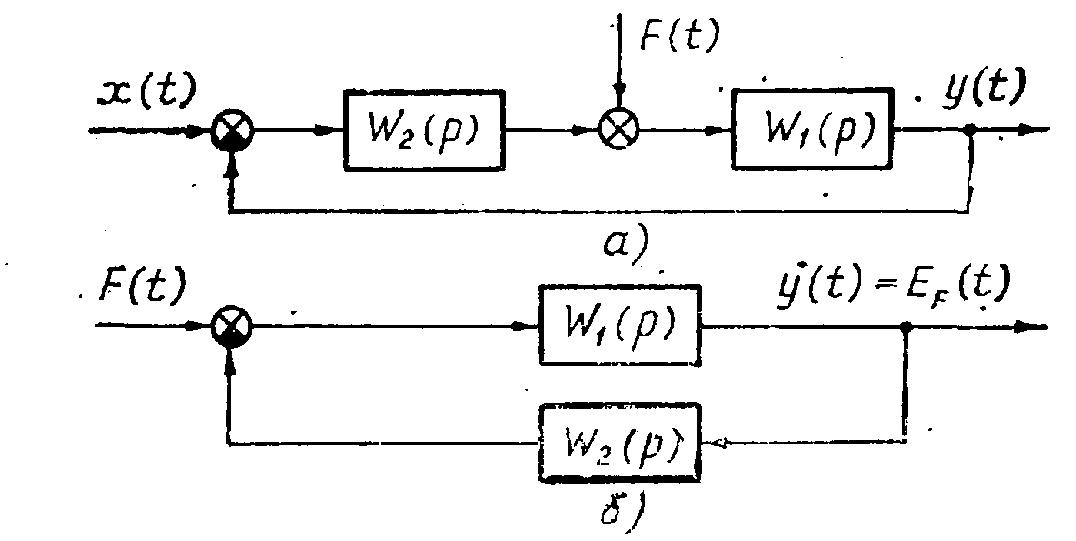
К пояснению
определения ошибки
 ;
;
а – структурная схема системы с обозначением
места действия помехи ; б – преобразование
схемы (а) в случае

Если часть системы
с передаточной функцией
,
расположенная до помехи не содержит
интегрирующего звена, то все коэффициенты
 и т. д. не равны нулю, любая помеха вызывает
ошибку на выходе системы и такая система
называется статической по отношению к
помехе.
и т. д. не равны нулю, любая помеха вызывает
ошибку на выходе системы и такая система
называется статической по отношению к
помехе.
Если перед помехой
содержится одно интегрирующее звено,
то
 ,
остальные коэффициенты не равны нулю
и помехи типа
,
остальные коэффициенты не равны нулю
и помехи типа
 не приводят к ошибке на выходе. В этом
случае система управления называется
астатической 1 – го порядка по отношению
к помехе.
не приводят к ошибке на выходе. В этом
случае система управления называется
астатической 1 – го порядка по отношению
к помехе.
При наличии двух интегрирующих звеньев перед помехой система по отношению к помехе будет астатической 2 – го порядка.
В этом случае
 и помеха
и помеха
 ошибку не вызывает.
ошибку не вызывает.
По отношению к ошибкам от помех также выгодно увеличивать коэффициент усиления. Однако это приводит к уменьшению устойчивости системы. Значит, во всех случаях повышение точности находится в противоречии с требованиями устойчивости.
В.3 Основные законы управления, реализуемые в регуляторах автоматических систем: пропорциональный, интегральный, пропорционально-интегральный, пропорционально-интегрально-дифференциальный
Законом управления называется математическая зависимость, в соответствии с которой регулятор вырабатывает управляющее воздействие. Наиболее распространённые законы управления, в которых используется принцип отклонения, следующие:
Пропорциональный закон
 ,
где
,
где
 - коэффициент усиления (передачи)
регулятора, где
- коэффициент усиления (передачи)
регулятора, где
 ,
,
 ,
- относительные координаты отклонения
и управления,
,
- относительные координаты отклонения
и управления,
 - некоторые значения координат
и
,
принятые за базовые.
- некоторые значения координат
и
,
принятые за базовые.
Регуляторы,
осуществляющие этот закон, называются
 - регуляторами. К ним относятся регуляторы
прямого действия и с жёсткой обратной
связью.
- регуляторами. К ним относятся регуляторы
прямого действия и с жёсткой обратной
связью.
Интегральный закон (И - регулятор)
 или
или
 ,
где
,
где
 имеет размерность времени, называется
постоянной времени интегрирования.
Этот закон обеспечивает астатическое
регулирование, так как процесс
регулирования заканчивается только
тогда, когда отклонение (ошибка
регулирования)
имеет размерность времени, называется
постоянной времени интегрирования.
Этот закон обеспечивает астатическое
регулирование, так как процесс
регулирования заканчивается только
тогда, когда отклонение (ошибка
регулирования)
 .
.
Пропорционально – интегральный закон (ПИ - регулятор)
 .
Этот закон осуществляется в изодромных
регуляторах и также обеспечивает
астатическое регулирование.
.
Этот закон осуществляется в изодромных
регуляторах и также обеспечивает
астатическое регулирование.
Пропорционально – интегрально – дифференциальный закон (ПИД - регулятор)
 ,
где
и
,
где
и
 - соответственно постоянные времени
интегрирования и дифференцирования.
Этот закон обеспечивает астатическое
регулирование. Производная
- соответственно постоянные времени
интегрирования и дифференцирования.
Этот закон обеспечивает астатическое
регулирование. Производная
 вводится в закон регулирования для
повышения качества процесса регулирования.
вводится в закон регулирования для
повышения качества процесса регулирования.
В.4 Синтез САУ и САР
При проектировании систем автоматического управления многие элементы предопределены техническим заданием и составляют неизменяемую часть системы. Обычно в неё входят объект регулирования, исполнительные устройства, усилители, элементы сравнения. Динамические свойства неизменяемой части системы, как правило, отличаются в худшую сторону от тех, которые необходимо иметь. Для обеспечения требуемых характеристик необходимо надлежащим образом выбрать корректирующие устройства и включить их в схему системы управления. Эта задача представляет собой задачу синтеза системы автоматического управления.
Принцип выбора характеристик корректирующего устройства состоит в следующем.
Пусть система
управления с передаточной функцией
разомкнутой системы
 (слайд 14.6) не обладает необходимыми
свойствами. Добавим в систему корректирующее
устройство с передаточной функцией
(слайд 14.6) не обладает необходимыми
свойствами. Добавим в систему корректирующее
устройство с передаточной функцией
 .
Необходимо отыскать передаточную
функцию корректирующего устройства,
обеспечивающего необходимые свойства
системы управления.
.
Необходимо отыскать передаточную
функцию корректирующего устройства,
обеспечивающего необходимые свойства
системы управления.