

Слайд 14.1

Пояснение ошибки воспроизведения
детерминированного входного заданного
сигнала в
установившемся режиме
 :
:
а – обозначение сигналов на структурной схеме;
б – пример формирования ошибки
Слайд 14.2

Пояснение ошибки, обусловленной детерминированной
помехой в
установившемся режиме
 :
:
а – обозначение сигналов на структурной схеме;
б – пример формирования ошибки
В простейших
случаях построение переходной функции,
а значит определение
и
,
достаточно просто. Например, для
автоматической системы, описываемой
дифференциальным уравнением 1 – го
порядка, переходная функция является
экспонентной и время регулирования
 ,
перерегулирование отсутствует. (Т –
постоянная времени).
,
перерегулирование отсутствует. (Т –
постоянная времени).
Для системы,
описываемой дифференциальным уравнением
2 го порядка, время регулирования равно
трём постоянным времени, делённым на
относительный коэффициент затухания
 .
.
В.2 Точность автоматических систем на установившемся режиме
В.2.1 Определение ошибки
Существуют различные методы оценки точности автоматических систем на установившихся режимах. Один из них – метод оценки коэффициентов ошибок, суть которого в следующем.
Пусть сигнал помехи
отсутствует
 .
Тогда из рассмотрения структурной схемы
системы управления (слайд 14.3) следует,
что
.
Тогда из рассмотрения структурной схемы
системы управления (слайд 14.3) следует,
что
 .
Поскольку выходной сигнал системы можно
записать через входной сигнал и
передаточную функцию системы
.
Поскольку выходной сигнал системы можно
записать через входной сигнал и
передаточную функцию системы
 ,
то
,
то
 ,
,
где
 характеризует ошибку системы и называется
передаточной функцией ошибки от входного
сигнала
характеризует ошибку системы и называется
передаточной функцией ошибки от входного
сигнала
 ,
,
где многочлены
 и
и
 числителя и знаменателя передаточной
функции разомкнутой системы записаны
так, что коэффициенты при членах с
младшими степенями
равны единице. При этом
является коэффициентом усиления
разомкнутой системы.
числителя и знаменателя передаточной
функции разомкнутой системы записаны
так, что коэффициенты при членах с
младшими степенями
равны единице. При этом
является коэффициентом усиления
разомкнутой системы.
После деления
многочленов
и
 получаются слагаемые следующего типа
получаются слагаемые следующего типа
 ,
,
где
 - коэффициенты ошибок.
- коэффициенты ошибок.
Тогда формулу для вычисления ошибок можно записать
 (1)
(1)
Коэффициенты ошибок вычисляются по формулам
 и т. д.
и т. д.
Коэффициенты
 являются коэффициентами характеристического
уравнения разомкнутой системы
являются коэффициентами характеристического
уравнения разомкнутой системы

Коэффициенты
 являются коэффициентами характеристического
уравнения замкнутой системы
являются коэффициентами характеристического
уравнения замкнутой системы
 .
.
Слайд 14.3
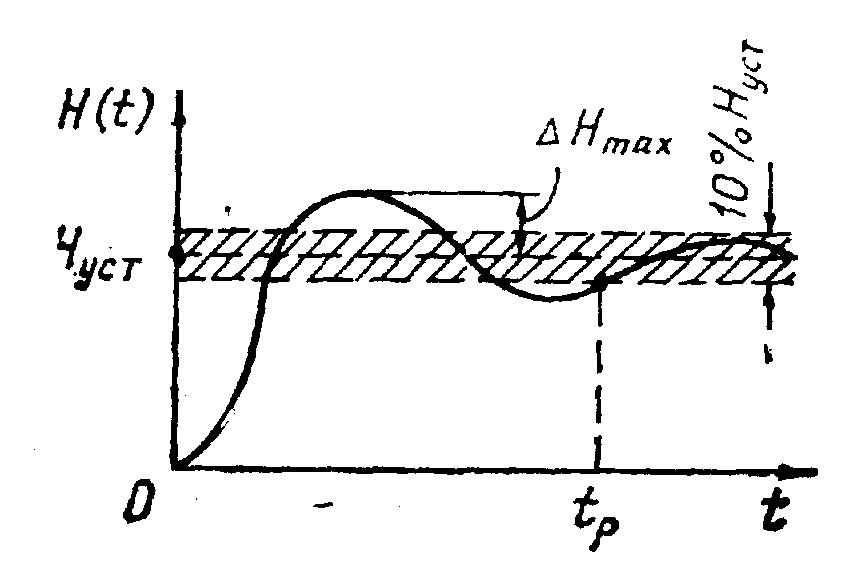
Переходная функция автоматической системы
управления и определение времени
и величины перерегулирования
Вид зависимости
(1) показывает, что ошибка
зависит как от характера изменения
входного сигнала
по времени, так и от коэффициентов ошибок
 ,
являющихся функциями структуры
автоматической системы.
,
являющихся функциями структуры
автоматической системы.
Принципиальное
влияние на ошибки системы оказывает
наличие интегрирующих звеньев в её
структуре, число которых называется
порядком астатизма системы
 .
.
Для статических
систем
 ни один из коэффициентов
не равен нулю. Для астатических систем
1 - го порядка
ни один из коэффициентов
не равен нулю. Для астатических систем
1 - го порядка
 ,
где
,
где
 - передаточная функция без учёта
интегрирующих звеньев и коэффициента
усиления,
- коэффициент усиления разомкнутой
системы,
- передаточная функция без учёта
интегрирующих звеньев и коэффициента
усиления,
- коэффициент усиления разомкнутой
системы,
 ,
коэффициент
,
коэффициент остальные не равны нулю. Для астатических
систем 2 – го порядка
остальные не равны нулю. Для астатических
систем 2 – го порядка
 коэффициенты
коэффициенты
 ,
остальные не равны нулю,
,
остальные не равны нулю,
 .
.
Чем больше астатизма , тем точнее система отрабатывает более сложное воздействие.
Поэтому системы
управления выполняются как астатические.
Однако, с увеличением
системы более склонны к колебаниям в
переходных процессах, и их устойчивость
ухудшается. Поэтому система с
 практически не встречаются.
практически не встречаются.
Реакции систем на типовые задающие воздействия и установившиеся ошибки представлены на слайде 14.4. При любых коэффициенты ошибок пропорциональны коэффициентам усиления разомкнутой системы. Поэтому, с точки зрения ошибок, выгодно иметь большие значения коэффициентов усиления .
В.2.2 Определение ошибки
Структурную схему
система управления с помехой можно
привести к виду, показанному на слайде
14.5. Для определения ошибок
будем считать, что входной сигнал
отсутствует
 .
В этом случае структурная схема
преобразуется к виду, показанному на
слайде, а выходной сигнал будет равен
сигналу ошибки.
.
В этом случае структурная схема
преобразуется к виду, показанному на
слайде, а выходной сигнал будет равен
сигналу ошибки.
Формула для вычисления ошибок от помехи имеет вид
 .
.
Коэффициенты ошибок равны

и т. д.
Коэффициенты
 являются коэффициентами уравнения,
образованного произведением знаменателя
передаточной функции
являются коэффициентами уравнения,
образованного произведением знаменателя
передаточной функции
 и числителя передаточной функции
и числителя передаточной функции
 .
Коэффициенты
.
Коэффициенты
 являются коэффициентами характеристического
уравнения замкнутой системы.
являются коэффициентами характеристического
уравнения замкнутой системы.
Влияние структуры системы на её ошибки аналогично ранее рассмотренному.