

Слайд 10.5
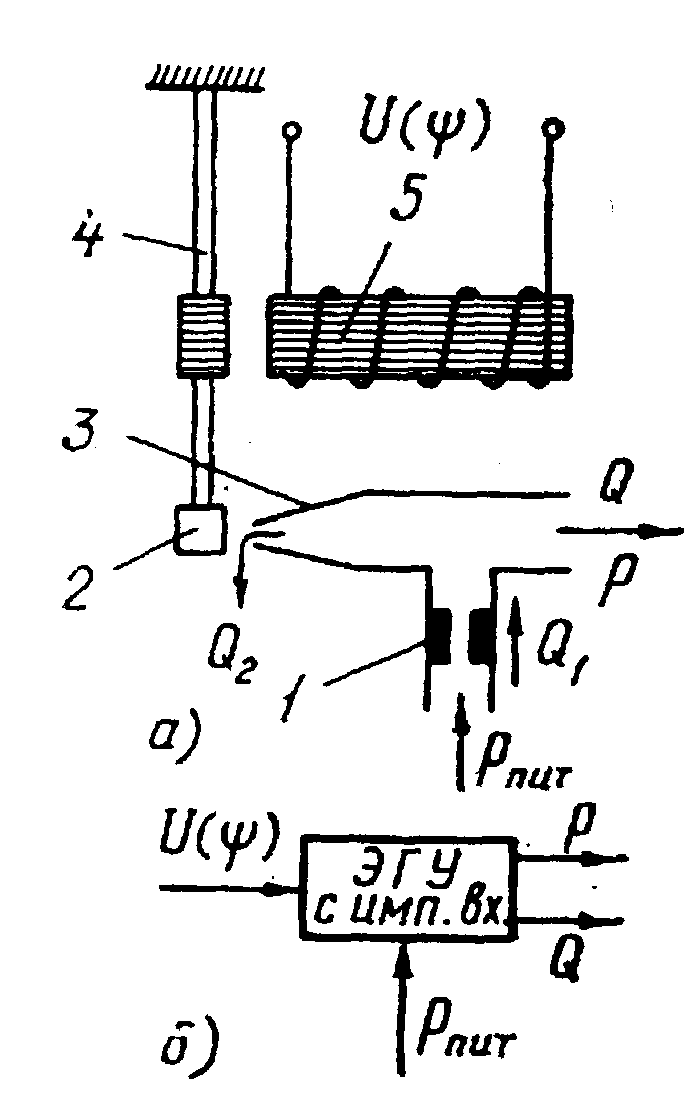
Принципиальная (а) и функциональная (б) схемы электрогидравлического усилителя с импульсным входным сигналом
Слайд 10.6

К пояснению скважности Статическая характеристика
импульсного сигнала электрогидравлического
усилителя с импульсным вход-
ным сигналом
Во время подачи
тока на обмотку реле сердечник притягивает
пластинку, и заслонка 2 закрывает сопло
3 ( ).
При отсутствии тока (в течение времени
).
При отсутствии тока (в течение времени
 )
заслонка открывает сопло и
)
заслонка открывает сопло и
 .
.
Соотношение времени
открытия, и закрытия сопла определяется
коэффициентом
скважности
 ,
где
,
где
 - период импульсного сигнала. Ясно, что
с увеличением скважности слив через
сопло уменьшается, а при уменьшении –
увеличивается. Значит, увеличению
- период импульсного сигнала. Ясно, что
с увеличением скважности слив через
сопло уменьшается, а при уменьшении –
увеличивается. Значит, увеличению
 соответствует возрастание выходных
сигналов
и
и наоборот.
соответствует возрастание выходных
сигналов
и
и наоборот.
Частота электрического сигнала достаточно велика (15…20 Гц).
Статическая
характеристика электрогидравлического
усилителя с импульсным входным сигналом
имеет полную аналогию с зависимостью
(4) для усилителя типа сопло – заслонка,
если положить
 .
Таким образом, изменение скважности
аналогично изменению расстояния от
заслонки до сопла усилителя.
.
Таким образом, изменение скважности
аналогично изменению расстояния от
заслонки до сопла усилителя.
Аналогичен также графический вид характеристики (слайд 10.6).
Такие усилители являются устройствами, соединяющими электрические и гидравлические части систем автоматического управления.
В.1. Назначение и типы исполнительных устройств
Исполнительные устройства являются конечными элементами автоматических систем. Они вырабатывают регулирующее воздействие, которое прикладывается к объекту. В зависимости от вида энергии, необходимой для работы исполнительного устройства, исполнительные устройства могут быть электрическими, гидравлическими и пневматическими.
Управление работой исполнительного устройства осуществляется усилителями мощности. Иногда усилитель и исполнительные устройства конструктивно объединяются в одном блоке, который называют сервомеханизмом.
Основные требования, предъявляемые к исполнительным устройствам:
1) Достаточное быстродействие, которое зависит от инерционных свойств. Поэтому необходимо принимать меры для уменьшения инерционности.
2) Возможность изменения направления перемещения (скорости) исполнительного устройства при изменении знака управляющего сигнала (реверс).
Если исполнительное устройство не является реверсивным, то в автоматической системе невозможно реализовать принцип управления.
3) При непрерывном управлении выходной сигнал должен изменяться плавно в достаточно широких пределах.
4) Достаточная мощность при малой массе и габаритах.
5) Высокая эксплуатационная надёжность.
В.2. Исполнительные гидравлические устройства
Такие устройства отличаются простотой конструкции, надёжностью в работе, небольшими размерами и малым весом на единицу мощности. Они позволяют получить большой диапазон изменения скорости перемещения и не требуют редуктора для связи с объектом регулирования. Главное их достоинство – малая инерционность и, следовательно, высокое быстродействие.
Недостатки – возможность утечки жидкости, изменение характеристик привода из – за изменения вязкости жидкости от температуры, чувствительность к загрязнению рабочей среды.
В.2.1. Силовые цилиндры одностороннего и двухстороннего действия
В авиационных системах управления используются силовые цилиндры возвратно – поступательного прямолинейного действия. Такие силовые цилиндры (слайд 11.1) могут быть двухстороннего (а, б) и одностороннего (в) действия. Шток поршня силового цилиндра одностороннего действия при отсутствии давления под действием пружины занимает крайнее положение.
Широко применяются
силовые цилиндры, в которых, с одной
стороны, имеется управляющая полость
2, а с другой - расположена полость 1 с
постоянным давлением

Входными сигналами
силового цилиндра являются давление
 и расход жидкости
выходным сигналом – перемещение штока
и расход жидкости
выходным сигналом – перемещение штока
 .
Сжимаемостью жидкости и её перетеканиями
через уплотнения поршня обычно
пренебрегают.
.
Сжимаемостью жидкости и её перетеканиями
через уплотнения поршня обычно
пренебрегают.
Статическую характеристику силового цилиндра при наличии в его конструкции пружины можно получить из условия равенства сил, действующих на поршень.