

3.2 Регулювання швидкості.
Таке регулювання можливо здійснювати двома способами: параметричним і в замкнутих системах.
Параметричне регулювання (керування) – це зміна координати електропривода за рухом будь-якого параметра електричного кола двигуна або напруги живлення, коли у це коло вмикають резистори, конденсатори індуктивності тощо.
У замкнутих системах системах електропривода вплив на двигун звичайно здійснюється зміною напруги живлення, або його частоти ,або і амплітуди напруги і частоти разом . Для такого регулювання (керування ) потрібні силові перетворювачі постійного або змінного струмів.
Подивимось на рис 3.2, на якому характеристика 1 – природна (основна). Електропривод працює у крапці А із координатами ωном і Мс . Тепер нам необхідно перевести електропривод у крапку В із тим самим моментом Мс, але із швидкістю ωшт. Це можливо виконати вельми просто увімкнути у коло якоря резистор Rp. При цьому буде одержана штучна характеристика 2. Опір резистора Rp можливо просто розрахувати таким чином, щоб характеристика 2 пройшла через крапку В.
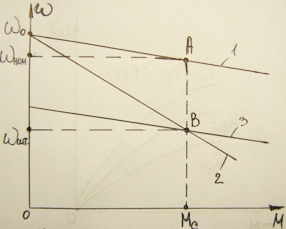
Рис. 3.2
Другий спосіб – за допомогою перетворювача знизити напругу живлення і отримати характеристику 3, яка теж, як і характеристика 2 пройде через точку В.
Перевагою параметричного регулювання є простота, але його недолік – низька точність. В той же час у склад замкнутої системи регулювання входить дорогий перетворювач, регулювальні пристрої, елементи зворотних зв’язків. Але за допомогою замкнутої системи можливо забезпечити високу точність роботи електропривода.
Регулювання швидкості можливо характеризувати за допомогою шести основних показників .
Діапазон регулювання D визначається відношенням максимальної та мінімальної швидкостей
 при
заданих межах зміни навантаження на
валу двигуна.
при
заданих межах зміни навантаження на
валу двигуна.
Для різних робочих машин необхідно мати різні діапазони регулювання, може бути D =3…4, 20…50, 50…100 і більше.
Напрямок регулювання швидкості відносно природної характеристики. Штучні характеристики можуть бути вище або нижче основної . У такому разі кажуть, що регулювання є двохзонним.
Плавність регулювання швидкості визначається кількістю одержаних штучних характеристик в даному діапазоні регулювання. Вона оцінюється коефіцієнтом, котрий є відношенням швидкостей на двох сусідніх характеристиках, тобто
 ,
,
 і
і
 швидкості на і-й та (і-1)-й штучних
характеристиках. Регулювання буде
зовсім плавним, якщо
швидкості на і-й та (і-1)-й штучних
характеристиках. Регулювання буде
зовсім плавним, якщо
 ,
а кількість швидкостей
,
а кількість швидкостей
 .
.
Найменша
плавність регулювання у двохшвидкосних
асинхронних двигунів, у них
![]() .
Висока плавність у ДПС НЗ, у яких виконують
двохзонне регулювання:
ослабленням
магнітного потоку для одержання
швидкостей вище основної і зменшенням
напруги живлення для одержання швидкостей
нижче основної.
.
Висока плавність у ДПС НЗ, у яких виконують
двохзонне регулювання:
ослабленням
магнітного потоку для одержання
швидкостей вище основної і зменшенням
напруги живлення для одержання швидкостей
нижче основної.
Стабільність швидкості характеризується зміною швидкості двигуна за зміною момента навантаження, тобто за жорсткістю характеристики
 .
.
Відхилення кутової швидкості за зміною значення Мс будують тим більше, чим менша величина . Наприклад, на рис. 3.2 характеристики 2 і 3 забезпечили роботу в заданій точці В. Але жорсткість характеристики 3 більша за 2, тому зміна швидкості на характеристиці 2 буде більшою, що може обмежити діапазон регулювання швидкості.
5) Допустиме навантаження двигуна відповідає тому моменту навантаження при якому нагрів двигуна не буде перевищувати допустиме значення для даного класу ізоляції, що використовується у двигуні.
При роботі на природній характеристиці таким навантаженням є номінальний момент, за яким двигун споживає номінальний струм. При роботі на штучних характеристиках струм теж повинен бути номінальним, і, як слід буде нагрів буде нормативним. Оскільки нагрів є залежним від умов охолодження, то допустиме навантаження повинно враховувати цю обставину.
6)
Економічність регулювання швидкості
визначається втратами на будову та
експлуатацію електроприводу. Суттєве
значення мають втрати енергії та
загальний ККД у процесі регулювання,
які є різними за різних способів
регулювання. Також суттєвим економічним
показником є коефіцієнт потужності
![]() ,
який може розрізнятися на різних кутових
швидкостях із різним часом продовж
усього часу регулювання.
,
який може розрізнятися на різних кутових
швидкостях із різним часом продовж
усього часу регулювання.