

2.2.6 Гальмування пртивовмиканням.
Цей режим, як зазначено раніше, може бути здійснений двома способами:
- Мс > Mкз при активному моменті навантаження;
- коли змінюють полярність живлення якоря;
В обох випадках використовують струмообмежувальні резистори .
Розглянемо ці процеси за допомогою графіків на рис. 2.16.
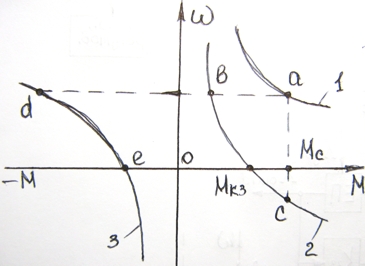
Рис. 2.16
Хай двигун працює на природній характеристиці 1 у крапці а. Впровадимо у коло якоря резистор Rp, одержимо характеристику 2 і з крапки а перейдемо до крапки b, у якої М<Мс. Двигун почне зупинятись.
Коли буде момент Мкз, ω=0, а двигун по характеристиці 2 під впливом активного моменту навантаження почне обертатись в іншу сторону (знак ω змінився), у крапці с настане рівновага електромагнітного та активного навантажувального моментів. Приклад цього: робота вантажопіднімальних механізмів.
В іншому способі перемикають полярність живлення якоря, а напрямок струму збудження залишається незмінним: буде одержана характеристика 3, на яку в крапку d з крапки а перейде двигун. Він почне гальмуватись і у крапці е зупиниться (ω =0), його відключають від мережі.
Слід відзначити, якщо при такому перемиканні не використовувати струмообмежувальний резистор Rp, характеристика 3 була б віддзеркаленням характеристики 1. Але з урахуванням Rp жорсткість характеристики 3 значно менша за характеристику 1.
2.3 Дпс змішаного збудження (зз) .
Схема двигуна показана на рис. 2.17 :
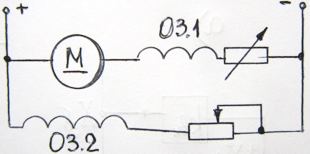
Рис. 2.17
Характеристики,
як і у ДПС ПЗ не мають аналітичного
виразу, тому використовують універсальні
характеристики. Однак двигун має
швидкість холостого ходу
 ,
де Ф2
- магнітний
потік
обмотки збудження ОЗ2. Звичайно МРС обох
обмоток збудження рівні, тобто Fоз1=Fоз2.
,
де Ф2
- магнітний
потік
обмотки збудження ОЗ2. Звичайно МРС обох
обмоток збудження рівні, тобто Fоз1=Fоз2.
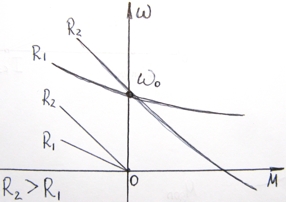
Рис2.18
Характеристики ДПС ЗЗ показані на рис. 2.18. Розрахунок резисторних характеристик виконується так, як у ДПС ПЗ. ДПС ЗЗ допускає усі три види електричного гальмування.
При рекуперації, щоб не розмагнічувати машину при досягненні швидкості ω0, шунтують обмотку ОЗ1, тому у другому квадранті характеристики прямолінійні.
При гальмуванні пртивовмиканням характеристики будуть нелінійні, оскільки разом із моментом (струмом)змінюється МРС Fоз1 .
Розділ 3. Регулювання координат електроприводів та його структури.
3.1 Загальні положення.
Функція керування – одна із основних функцій електропривода. Треба не тільки привести до руху промисловий механізм, але й керувати цим рухом. У теорії електропривода механічні, електричні і магнітні змінні, котрі характеризують роботу двигуна - швидкість, прискорення, момент струм, магнітний потік тощо - звуть координатами. Дійсно, ці змінні часто бувають назвами вісей координат графіків характеристик електродвигунів.
Тому можливо сказати, що керування рухом виконавчого органу електричним способом виконується способом регулювання координат (тобто змінних) електродвигуна.
Регулювання координат електродвигуна повинно здійснюватися для керування як рухом, що є сталим, так і рухом у перехідному процесі.
Розглянемо, наприклад, діаграму руху ліфту між двома сусідніми зупинками на рис. 3.1 – це зміна швидкості за часом.
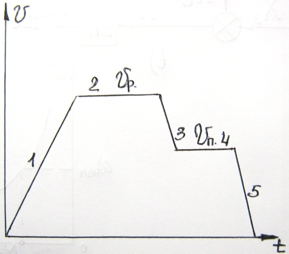
Рис. 3.1
Графік
має 5 ділянок. На 1-й ділянці відбувається
розбіг до робочої швидкості руху
![]() ,
із якою ліфт рухається на ділянці 2.
Потім на ділянці 3 виконується гальмування,
щоб короткочасно рухатись на ділянці
4 із пониженою швидкістю
,
із якою ліфт рухається на ділянці 2.
Потім на ділянці 3 виконується гальмування,
щоб короткочасно рухатись на ділянці
4 із пониженою швидкістю
![]() .
Нарешті на ділянці 5 відбувається повне
гальмування та зупинка.
.
Нарешті на ділянці 5 відбувається повне
гальмування та зупинка.
Щоб сформувати саме такий графік руху треба виконувати цілеспрямований вплив на двигун.
Додамо також, що електропривод часто повинен забезпечити регулювання одночасно декілька координат, наприклад: швидкості прискорення і положення виконавчого органу.