

9.3.3 Витрати при навантаженні, тобто при .
Для
визначення витрат енергії при роботі
ЕП під навантаженням використаємо
формулу 9.10, в якої момент двигуна
![]() .
Тоді формула одержить вигляд
.
Тоді формула одержить вигляд
 (9.15)
(9.15)
Оскільки
і момент і швидкість можуть бути
складними, та ще і нелінійними, функціями
часу, використовувати 9.15 дуже складне.
Тому
будемо вважати, що за час
,
який є залежним від величини
![]() ,
діє деякий
,
діє деякий
![]() ,
при якому час
буде таким, як і за реальним моментом.
Розглянемо це за допомогою механічної
характеристики АД на рис. 9.4.
,
при якому час
буде таким, як і за реальним моментом.
Розглянемо це за допомогою механічної
характеристики АД на рис. 9.4.
Якщо
 ,
,
 ,
то
,
то
![]() .
.
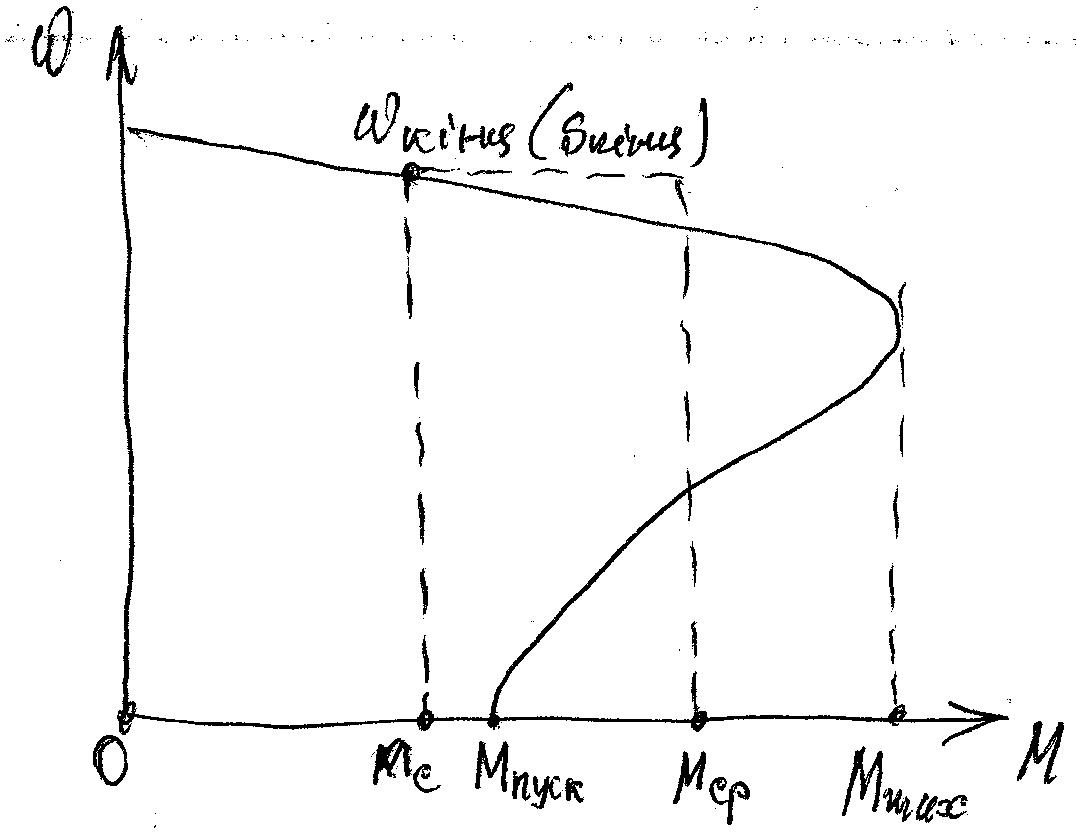
Рис. 9.4
При
навантаженні диференціал часу
 ,
де знак « - » відповідає пуску, а знак «
+ » - гальмуванню.
Замінивши межі
інтегрування:
,
де знак « - » відповідає пуску, а знак «
+ » - гальмуванню.
Замінивши межі
інтегрування:
![]() ,
одержимо
,
одержимо
 (9.16)
(9.16)
Вираз 9.16 визначає витрати енергії у перехідних режимах у колах роторів МПС і АД. Для визначення повних витрат в АД слід використовувати вираз 9.13. З 9.16 бачимо, що витрати при реактивному моменті навантаження порівняно з холостим ходом збільшується в режимі пуску і зменшуються в режимі гальмування (знак « - » в 9.16), оскільки при гальмуванні частка накопиченої кінетичної енергії витрачається на подолання моменту навантаження і в двигуні буде виділятися у вигляді витрат лише частка усієї кінетичної енергії.
9.4 Втрати енергії в перехідних процесах в системі керуючий перетворювач – двигун (кп – д)
9.4.1 Система статичний перетворювач – двигун (скп – д)
При
плавній зміні напруги живлення для ДПС,
або напруги і частоти для АД джерело
задає нагромаджувачу енергетичній
рівень
не
стрибком, а поступово. При цьому різниця
між
,
яка задана джерелом, і швидкістю ротора
![]() ,
буде меншою за стрибкоподібною зміною
.
Тому зменшуються і витрати. Наприклад,
якщо
,
а
змінюється безмірно повільно, то
устигає
слідувати за неї. Енергія від джерела
буде повністю витрачатись на кінетичну
енергію ротора, а витрати при цьому
цілком відсутні.
,
буде меншою за стрибкоподібною зміною
.
Тому зменшуються і витрати. Наприклад,
якщо
,
а
змінюється безмірно повільно, то
устигає
слідувати за неї. Енергія від джерела
буде повністю витрачатись на кінетичну
енергію ротора, а витрати при цьому
цілком відсутні.
В
інтервалі часу
![]()
 ,
де
,
де
![]() - кутове прискорення. Кутова швидкість
ротора
- кутове прискорення. Кутова швидкість
ротора
![]() ,
а момент
,
а момент
![]() ,
що показано раніше в 8.4 і 8.5.
,
що показано раніше в 8.4 і 8.5.
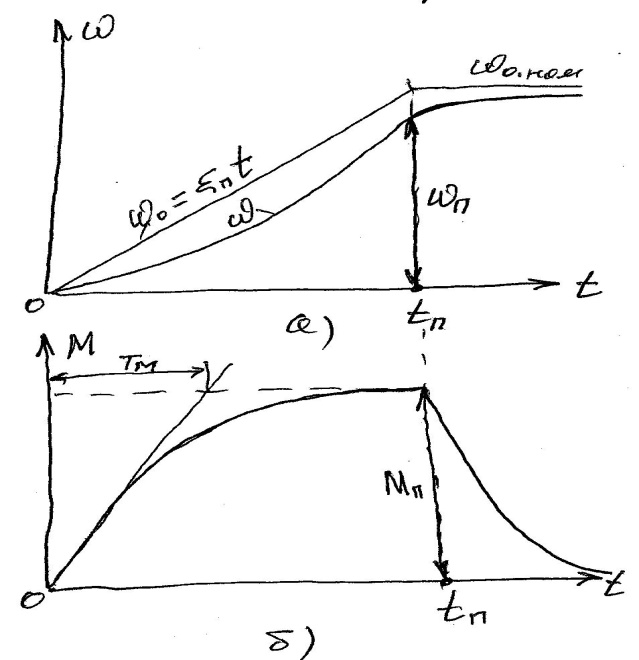
Рис. 9.5
Коли
![]()
![]() ,
а швидкість і момент будуть
,
а швидкість і момент будуть
![]()
![]() .
Вирати будуть як сума двох складових
для кожного етапу
.
Вирати будуть як сума двох складових
для кожного етапу
 В цю відому формулу підставимо
В цю відому формулу підставимо
![]()
![]() ;
;
![]() ;
;
 ;
тоді
;
тоді
 (9.17)
(9.17)
Завжди
![]() набагато
більше
набагато
більше
![]() тому витрати енергії значно менше
(в 5…6 разів) за пуск з подаванням напруги
стрибком. Якщо
тому витрати енергії значно менше
(в 5…6 разів) за пуск з подаванням напруги
стрибком. Якщо
![]() ,
то
,
то
![]() .
Також знижуються витрати при реверсуванні
або гальмуванні, якщо величина
змінюється плавно.
.
Також знижуються витрати при реверсуванні
або гальмуванні, якщо величина
змінюється плавно.
Хай тепер, тобто робота іде за навантаженням. То після інтегрування і перетворення основного рівняння для витрат, одержимо:
 (9.18)
(9.18)
В
9.18 параметр
 ,
він характеризує зменшення витрат
порівняно з прямим пуском, коли напруга
і частота задаються стрибком. Звичайно
,
він характеризує зменшення витрат
порівняно з прямим пуском, коли напруга
і частота задаються стрибком. Звичайно
![]() і
і
![]() ,
тоді витрати енергії знижуються приблизно
в 3…5 разів порівняльна з пуском при
незмінній напрузі.
,
тоді витрати енергії знижуються приблизно
в 3…5 разів порівняльна з пуском при
незмінній напрузі.
Для
АД, які раніше, треба 9.18 помножити на
 де
де
![]() - результуючий опір фази кола статора
системи СКП-Д.
- результуючий опір фази кола статора
системи СКП-Д.