

7.8.4 Динамічне гальмування ад
При
цьому статор відключається від мережі
змінного струму і на його дві фази
подається постійний струм , який можливо
регулювати за допомогою резистора
.
В коло ротора вмикається резистор
![]() .
.
Відповідні характеристики показати на рис. 7.22.
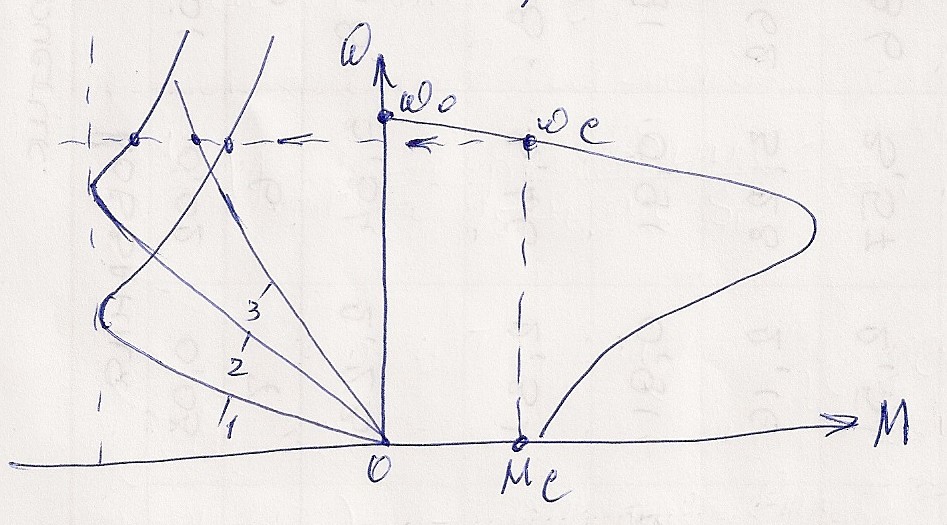
Рис. 7.22
Характеристика
1 для
![]() ,
2 – для
,
2 – для
![]() і 3 -
.
і 3 -
.
Оскільки
магнітне поле статора є нерухомим, то,
як відомо, ковзання
![]() .
Якщо навантаження немає
.
Якщо навантаження немає
![]() ,
то
,
то
 , а час
, а час
гальмування:
 (7.40)
(7.40)
Якщо
![]() ,а
,а
![]() ,
то (7.40) можливо навести так:
,
то (7.40) можливо навести так:
 (7.41)
(7.41)
При
динамічному гальмуванні максимальний
момент
![]() і тоді електромеханічна стала часу в
(7.41)
і тоді електромеханічна стала часу в
(7.41)
![]() .
.
Як
бачимо, вираз (7.41) аналогічний (7.36), тобто
час гальмування є залежним від значення
![]() і має мінімум, коли
.
і має мінімум, коли
.
7.8.5 Рекуперативне гальмування ад
Це можливо, якщо кутова швидкість ротора . Тому слід перемикати кількість полюсів у багато швидкісних АД з меншою кількістю на більшу. При цьому спочатку буде рекуперація, а потім гальмування проти вмиканням, або динамічне.
Повільне рекуперативне гальмування можливо здійснити, якщо АД живиться від керованого статичного перетворювача. Повільно знижуючи частину живлення одержимо роботу двигуна у другому квадранті координат.
Час
гальмування можливо визначити, по-перше
визначивши постійну часу
![]() ,
а потім зав’язатися межами зміни
ковзання при гальмуванні у другому
квадранті.
,
а потім зав’язатися межами зміни
ковзання при гальмуванні у другому
квадранті.
Розділ 8. Формування перехідних процесів електроприводів
8.1 Загальні відомості
Раніше ми виявили, як виникають і проходять перехідні процеси, коли керуючі впливи відбуваються стрибком. Наприклад, пуск електропривода та інше, коли номінальна напруга відразу прикладається до затискачів електродвигуна.
Якщо двигун живиться не від мережі, а від керованого перетворювача, то можливо змінювати керуючий вплив електромеханічної системи не стрибком, а плавно.
Це дає змогу формувати перехідні процеси, близькі до оптимальних, обмежувати струм і момент у перехідних режимах не вводячи додаткові опори у силове коло, зменшувати втрати енергії у перехідних режимах.
Керування перехідними процесами може створити максимальну швидкодію при відповідних обмеженнях. Наприклад, для ДПС слід обмежувати струм якоря по умовах комутації до 2…2,5 кратного значення номінального. Слід, також, обмежувати максимальне значення кутової швидкості якоря.
Потрібно
також формувати перехідні процеси, щоб
обмежувати кутове прискорення привода,
тобто першу похідну швидкості
![]() ,
обмежувати, а також другу похідну
швидкості
,
обмежувати, а також другу похідну
швидкості
![]() (ривок) або першу похідну моменту двигуна
(ривок) або першу похідну моменту двигуна
 при
при
![]() .
Наприклад, максимальне значення
прискорення і уповільнення кабіни ліфта
не повинно перевищувати
.
Наприклад, максимальне значення
прискорення і уповільнення кабіни ліфта
не повинно перевищувати
![]() ,
а похідна прискорення і уповільнення
швидкісних ліфтів
,
а похідна прискорення і уповільнення
швидкісних ліфтів
![]() .
.
Для нас мають значення два випадки формування перехідних процесів:
1)при лінійному законі зростання керуючих дій на виході перетворювача;
2) при експоненційному законі зростання керуючих дій.
Перше – це без інерційна система статичний перетворювач – двигун (ТП-Д), а друга – це система генератор-двигун (Г-Д), у якої слід урахувати інерційність (індуктивність) обмотки збудження генератора.