

2.1.2 Електромеханічна характеристика
Відомо, що рівняння цієї характеристики:
 ;
(2.1)
;
(2.1)
У
рівнянні (2.1)
![]() -
ідеальна кутова швидкість холостого
ходу, коли Ія=0
, а
-
ідеальна кутова швидкість холостого
ходу, коли Ія=0
, а
![]() - перепад швидкостей,
який
залежить від значення опору R.
Характеристика
є
пряма
лінія, жорсткість якої залежить від
значення
R.
Якщо Rр=0,
характеристика природна і має достатньо
велику жорсткість, яка залежить від
значення Rя.
- перепад швидкостей,
який
залежить від значення опору R.
Характеристика
є
пряма
лінія, жорсткість якої залежить від
значення
R.
Якщо Rр=0,
характеристика природна і має достатньо
велику жорсткість, яка залежить від
значення Rя.
2.1.3 Механічна характеристика
Рівняння
цієї характеристики може бути одержане,
якщо в (2.1) замість Ія
підставити його значення
 ,
тоді:
,
тоді:
 (2.2)
(2.2)
В (2.2) - теж саме, що і в (2.1), а - статичний перепад швидкостей.
Дійсно, із зростанням навантаження швидкість зменшується, зменшується ЕРС, отже зростає струм Ія та момент М .
Можливо
також вважати, що
![]() і
і
![]() .
Тоді обидві характеристики будуть
відрізнятися лише масштабом на осі
абсцис. Вони наведені на рис.2.2.
.
Тоді обидві характеристики будуть
відрізнятися лише масштабом на осі
абсцис. Вони наведені на рис.2.2.
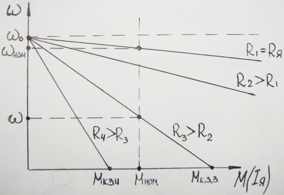
Рис. 2.2
Характеристика,
коли
R1
= Rя
природна, а решта (R
= Rя
+ Rр)
– штучні. Момент, коли
![]() зветься моментом короткого замикання
зветься моментом короткого замикання
 (2.3)
(2.3)
Перепад швидкостей у відносних одиницях :
![]() (2.4)
(2.4)
Із
(2.3) виходить, що
 .
Підставимо цей вираз у (2.2) і одержимо:
.
Підставимо цей вираз у (2.2) і одержимо:
 (2.5)
(2.5)
Перетворив (2.5), одержимо, що будь-яке значення моменту:
 (2.6)
(2.6)
Із
(2.6) отримаємо величину жорсткості:
![]() (2.7)
(2.7)
З
обрахуванням (2.5)
 (2.8)
(2.8)
Жорсткість буде тим більша, чим більше Мкз або менше Rр.
З урахуванням (2.4), (2.5), (2.8), одержимо:
 .
(2.9)
.
(2.9)
2.1.4 Побудова механічних характеристик дпс нз.
Побудова
природної характеристики можлива по
двом крапкам із координатами
![]() і
і
![]() .
.
У
каталогах наведені номінальні значення
напруги, потужності, швидкості та струму
двигуна. Отже, як відомо, момент
 ,
а
величина
,
а
величина
 . Тоді з (2.1) :
. Тоді з (2.1) :
 (2.10)
(2.10)
Якщо з каталогу відомо значення Rя, то можливо знайти значення ,
або навпаки, із (2.10) можливо визначити величину Rя .
Іноді,
якщо відомий ККД у номінальному режимі
![]() ,
приймають:
,
приймають:
![]()
 (2.11)
(2.11)
За допомогою (2.11) з використанням (2.10) іноді можливо визначити значення номінального ККД .
Можливо
також використовувати крапку із
координатами
![]() ,
,
причому момент Мкз є різним для різних значень R .
Використавши
вирази (2.3) – (2.6), а також виходячи із
подібності трикутників на рис.2.2
одержимо:
![]()
 (2.12)
(2.12)
Введемо
поняття номінального
значення опору
 ,
тобто це
такий опір, коли за номінальною напругою
протікає номінальний струм.
Опір у відносних одиницях буде
,
тобто це
такий опір, коли за номінальною напругою
протікає номінальний струм.
Опір у відносних одиницях буде
![]() .
З урахуванням цих величин, вираз (2.12)
буде мати вигляд:
.
З урахуванням цих величин, вираз (2.12)
буде мати вигляд:
 ,
де
(2.13)
,
де
(2.13)
![]()
Оскільки
магнітний потік
![]() ,
то
,
то
![]() (2.14)
(2.14)
Отже, при рівних значеннях жорсткості відносні характеристики різних двигунів збігаються.
З
урахуванням (2.7), одержимо
![]() ,
а
,
а
![]()
Таким чином, при номінальних значеннях І* = 1 і М* = 1,
![]() (2.15)
(2.15)
Вираз (2.15) є дуже важливим, він дозволяє побудувати пускову діаграму та сімейство штучних характеристик.