

5.2.2.1 Розрахунки резисторів r2д .
Отже, природна механічна характеристика 1 повинна бути звісною ( її можливо побудувати за формулою (5.6) ). Будова штучних характеристик показана на рис. 5.9.
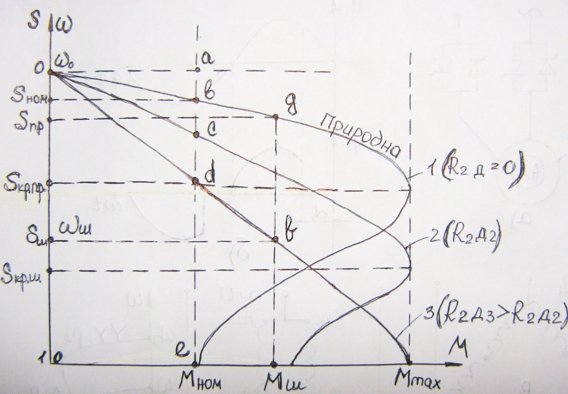
Рис. 5.9
Хай необхідно одержати штучну характеристику 2. За допомогою (5.3) визначимо відношення критичних ковзань характеристик 1і 2 :
 ,
тоді
,
тоді
 .
(5.13)
.
(5.13)
Очевидно,
вираз (5.13) згідно з (5.10) є справжнім для
будь-якого фіксованого моменту Мш,
а не тільки для Мmax.
Тому, якщо задана точка f
на
характеристиці 3
з координатами Мш
і Sш,
то для неї додатковий резистор
 ,
де Sпр
– ковзання на природній характеристиці,
яке відповідає моменту Мш
(точка g)
.
,
де Sпр
– ковзання на природній характеристиці,
яке відповідає моменту Мш
(точка g)
.
Одночасно, додамо, що коефіцієнт приведення ротора АД до статору
 ,
де (5.14)
,
де (5.14)
Е2к – фазна ЕРС ротора при S=1.
Тому,
якщо невідоме значення r2,
його можливо визначити за приблизною
формулою
 .
.
Можливо
також скористатись методом відрізків
, як це виконувалось для ДПС НЗ . Для
цього на рис. 5.9 приведена вертикаль для
моменту Мном.
Тут треба відзначити номінальний опір
АД :
 ,
а резистор по (5.13) буде
,
а резистор по (5.13) буде
 .
(5.14)
.
(5.14)
За
допомогою цього ж методу можливо
визначити опір фази обмотки ротора по
природній характеристиці 1
:
 .
.
Побудова
пускової діаграми виконується аналогічно
тому, як це було для ДПС НЗ, тому що робочі
ділянки механічних характеристик АД,
як і у ДПС НЗ, є прямолінійними . При
цьому приймають М1=(0.8…0.9)Мmax
,
а М2=(1.1…1.2)Мс. Ковзання на природній
характеристиці, яке відповідає моменту
М1
 ,
а кількість ступенів пускової діаграми
,
а кількість ступенів пускової діаграми
 .
.
Розрахунок пускових резисторів для цієї пускової діаграми виконують за допомогою виразів (5.13) і (5.14).
5.3 Регулювання ад зміною напруги живлення .
Як відомо, за зміною напруги величина Sпр і ω0 залишаються незмінними, але момент згідно (5.2) і (5.3) змінюється в квадраті. Такі характеристики наведені на рис. 5.10.
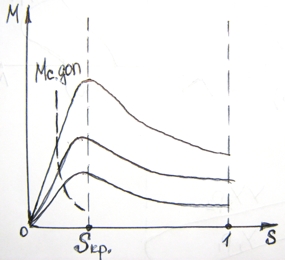
Рис. 5.10
Критичне ковзання при зменшені напруги також зменшується через вплив параметрів регуляторів напруги, котрій ввімкнутий у коло статора. Допущений момент навантаження різко спадає, тому межі регулювання в розімкнених системах регулювання обмежені і ці системи використовують лише у перехідних режимах для впливу на момент, коли, наприклад, треба забезпечити завдане прискорення, або обмежити, згідно (5.1), струм ротора.
Більш широкий діапазон регулювання можливо одержати за допомогою схеми, коли у коло фазного ротора ввімкнути резистори, а напруга живлення U1=var (рис. 5.11).
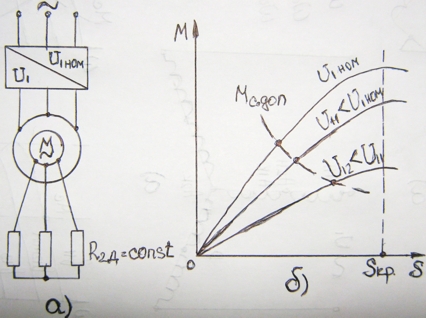
Рис. 5.11
Така система дозволяє виконувати плавне керування АД виключає застосування контакторної апаратури в роторному полі. Допущений момент збільшений, тому що витрати потужності виведені із ротора і виділяються в резисторах R2д. Але зі зменшенням напруги жорсткість характеристик також зменшується.
Можна також застосувати схему регулювання, яка наведена на рис. 5.12
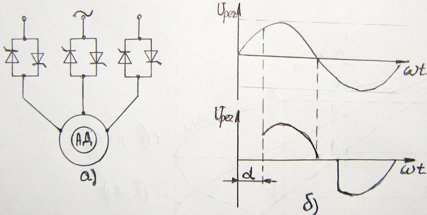
Рис. 5.12
Якщо ξ=1, тобто α=0, “ключі” постійно замкнені і характеристика – природна; якщо ξ=0, тобто α=π, двигун є відключеним від мережі (рис.5.12, б). Схема на рис. 5.12, а може бути виконана за допомогою семисторів. Такий тиристорний регулятор напруги дозволяє здійснити реверс, примушене електричне гальмування та ін.