

5.2 Регулювання ад за допомогою резисторів.
5.2.1 Резистор у колі статора (r1д).
Резистор R1д використовують для обмеження струму та моменту у перехідних режимах у АД з короткозамкненим ротором.
Можливо б було використовувати реакторне, але це суттєво зменшило б cosφ системи.
Із рівняння (5.1) виходить, що при S=const вмикання резистору R1д зменшує струм І2′ і, як наслідок, І1. Тому усі електромеханічні характеристики розташовані у першому квадранті нижче природної. Характеристики наведені на рис. 5.5, на якому бачимо, що резистор R1д не змінює , але зменшує струм короткого замикання, тобто пусковий.
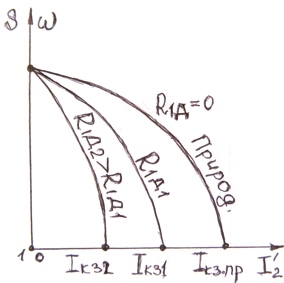
Рис. 5.5
Резистор R1д викликає додатковий спад напруги, тому напруга на статорі зменшується і у квадраті зменшується величина Мmax, зменшується і жорсткість β, а також допущений момент навантаження. Діапазон регулювання при цьому дуже малий. Механічні характеристики наведені на рис. 5.6.
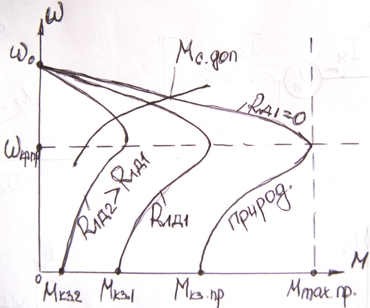
Рис. 5.6
Як слід з (5.3) величина Sкр декілька знижується. Інколи використовують R1д у одні фазі, результат – такий само, а резисторів менше.
Застосовують також схеми з імпульсним регулюванням R1д, як це наведено на рис. 4.25. Коли ξ=1 – характеристика природна, коли ξ=0 – характеристика відповідає значенню R1д.
При зростанні опору R1д, як бачимо на рис. 5.6, спадає швидкість і зростає ковзання S, тому також змушені зменшувати допустимий момент, бо витрати у колі ротора зростають пропорційно ковзанню (5.4).
5.2.1.1 Розрахунки резисторів r1д .
Введемо такі визначення:
відношення струмів короткого замикання (пускових) по штучній та природній характеристиках
 ;
;аналогічне відношення моментів КЗ,
 .
.
Повний опір короткого замикання, коли R1д =0, за схемою на рис. 5.1, б:
 ,
а активний опір
,
а активний опір
![]() ;
;
![]() .
.
Оскільки
![]() ,
то
,
то
 ,
тоді
,
тоді
 .
.
Величина cosφпуск залежить від потужності АД, а також від їх типу.
У першому наближені для АД потужністю 10…50кВт можливо прийняти для машин серії 4А cosφпуск≈0.4…0.3 відповідно, а для машин серії МТР і МТН cosφпуск≈ 0.7…0.5 відповідно.
5.2.2 Резистор у колі ротора (r2д) .
При такому вмиканні знижується струм І1, момент М і швидкість ω=ω0(1-S) .
Згідно
виразу (5.10) для штучної (резисторної)
характеристики жорсткість
 ,
(5.11)
,
(5.11)
а
діапазон регулювання
 .
(5.12)
.
(5.12)
Із
рівнянь (5.11) (5.12) виходить, що із зростанням
ковзання Sном.р
зростає
і величина D,
а жорсткість спадає. Підставивши у
(5.11) Sном.р
і
(5.12) одержимо:
 .
.
З курсу “Електричні машини” відомо, що при R2д=var електромеханічні характеристики аналогічні характеристикам на рис. 5.5, а механічні наведені на рис. 5.7.
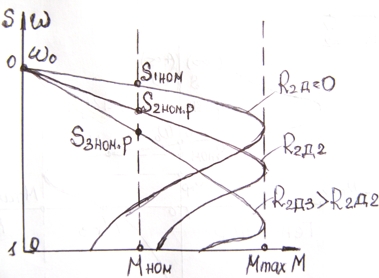
Рис. 5.7
Діапазон
регулювання звичайно D=2…3,
тому що із зростанням значення R2д
знижується не тільки жорсткість
![]() ,
але і ККД, тому що зростають втрати у
колі ротора .
,
але і ККД, тому що зростають втрати у
колі ротора .
Іноді використовують схему імпульсного (параметричного) регулювання швидкості на рис. 5.8, а.
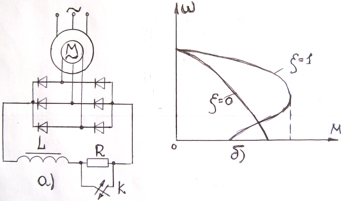
Рис. 5.8
Якщо ключ К замкнений (ξ=1) одержимо природну характеристику, якщо розімкнений (ξ=1) – резисторна характеристика по опору R на рис. 5.8, б. При такому регулюванні додаються втрати у ключі, тому енергетичні показники декілька гірші, ніж при звичайному ступінчатому регулюванні.