

4.3.2 Система г-д.
Принципова схема системи Г-Д (генератор – двигун) наведена на рис. 4.17
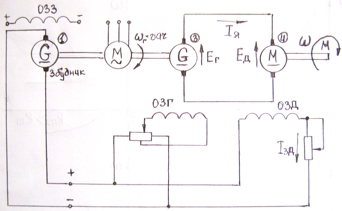
Рис. 4.17
Систему Г-Д (схему Леонарда) застосовують тільки у потужних електроприводах. На схемі:
1 – збудник;
2 – двигун змінного струму (синхронний), який обертає головний генератор (3), тому ωг=const.
4 – ДПС, який регулюється зміною напруги генератора (3).
Обмотка збудження генератора увімкнута таким чином, що дозволяє змінювати напрям струму генератора і, як наслідок, полярність генератора. Обмотка збудження двигуна (ОЗД) дозволяє регулювати струм збудження, тобто регулювати магнітний потік двигуна.
Це можуть бути потужні верстати, працюючі екскаватори, під ємні крани та інше. У дуже потужних приводах інколи застосовують квадратичну схему Леонарда, у якої є ще одна машина – збудник збудника. Синхронний двигун 2 працює для збільшення коефіцієнта потужності в мережі живлення.
Струм
збудження генератора має широкий
діапазон регулювання, а зміна його знаку
дозволяє реверсу вати двигун 4;
ЕРС генератора 3
-
![]() .
.
Згідно зі схемою заміщення (рис. 4.16) та рівняння (4.12), маємо:
 ,
де (4.13)
,
де (4.13)
![]() :
Rя
, Rяг
і Rм
- це опори кола якоря двигуна , якоря
генератора і мережі відповідно .
:
Rя
, Rяг
і Rм
- це опори кола якоря двигуна , якоря
генератора і мережі відповідно .
У
разі (4.13)
 ,
де К1
- постійна, тому (4.13) переводиться так:
,
де К1
- постійна, тому (4.13) переводиться так:
 (4.14)
(4.14)
Як слідує з виразу (4.14) сімейство механічних характеристик двигуна – це паралельні лінії, які займають усі чотири квадранти (див., рис. 4.18).
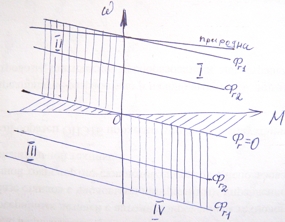
Рис. 4.18
Кожна
характеристика є залежністю від значення
магнітного потоку генератора , причому
![]() .
Якщо вважати , що магнітна система
генератора насичена , тобто
.
Якщо вважати , що магнітна система
генератора насичена , тобто
![]() ,
то
,
то
![]() .
.
Модулі жорсткості характеристик –
природної та системи Г-Д будуть відповідно
 і
і
 .
Очевидно:
.
Очевидно:
![]() .
Раніше зазначено, що можливо
.
Раніше зазначено, що можливо
![]() .
.
Отже, з рівняння (4.14) і рис. 4.18 бачимо, що у системі Г-Д може робити у двигунному та гальмовому режимах в обох напрямах обертання.
Квадранти 1 і 3 – це режим двигуна .
4.3.2.1. Динамічне гальмування – буде при Ег=0, тобто при Фг=0 і характеристика проходить через початок координат .
4.3.2.2. Гальмування противовмиканням – буде при однакових напрямах ЕРС генератора Ег і двигуна Ед. У цьому випадку, якщо ω≠0, знаки ω0 і ω будуть різні, тобто зони цієї роботи розташовані між віссю абсцис і характеристикою динамічного гальмування (штрихування на рис. 4.18).
4.3.2.3. Регулювання можливо, якщо Ед > Ег, або ω0<ω . Вони також можливо при малій швидкості ω, якщо діє активний момент при опусканні вантажу. Зони рекуперативного гальмування у 2-му та 4-му квадрантах між характеристикою динамічного гальмування і характеристикою для потоку Фг1 (пряме штрихування на рис. 4.18).
При
рекуперативному гальмуванні, як і у
двигунному режимі, відбувається трикратне
перетворення енергії, причому синхронний
двигун 3 (рис. 4.17) стає генератором і
віддає енергію у мережу . Таке
перетворення
енергії зменшує енергетичні показники
системи Г-Д . Дійсно , у системі повинні
виконуватись такі умови: номінальні
потужності генератора Рг.ном
і
двигуна Рд.ном
з
урахуванням ККД останнього ηд
-
 ;
;
номінальна
потужність двигуна генератора – 2
на рис. 4.17 -
 .
Через це сумарна потужність основних
машин
.
Через це сумарна потужність основних
машин
![]() .
.