

Розділ 4. Регулювання координат еп з двигуном постійного струму.
4.1 Регулювання кутової швидкості дпс змінного магнітного потоку.
4.1.1 Загальні відомості.
Таке регулювання звичайно проводять зменшенням потоку. Підсилювання потоку звичайно не виконується, тому що це призводить до значного нагріву обмотки збудження, а також зважаючи на значне насичення магнітного кола машини.
Ослаблення магнітного потоку має, як відомо з курсу “Електричні машини”, ряд обмежень. Це, у першу чергу, зростання міжламельної напруги, обмеження колової швидкості колектора та якоря, зростання реактивної ЕРС, котра пропорційна частоті обертання якоря.
Але регулювання змінного магнітного потоку надзвичайно економічно, тому що потужність збудження дуже мала.
4.1.2 Ослаблення магнітного потоку у дпс нз.
Таке регулювання можливо:
за допомогою резистора у колі збудження
живлення обмотки збудження від окремого перетворювача напруги.
Згідно
виразу (2.1), чим глибше ослаблення
збудження, тим вище кутова швидкість
холостого ходу ω.
В той же час, якщо ω=0,
то
![]() ,
тому електромеханічні характеристики
мають вигляд, як показано на рис. 4.1, де
ωоп
- кутова швидкість холостого ходу
природної характеристики, тобто із
повним збудженням.
,
тому електромеханічні характеристики
мають вигляд, як показано на рис. 4.1, де
ωоп
- кутова швидкість холостого ходу
природної характеристики, тобто із
повним збудженням.
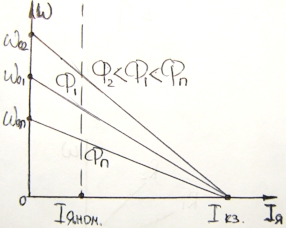
Рис 4.1
Жорсткість
характеристики
 зменшується разом із зменшенням
магнітного потоку.
зменшується разом із зменшенням
магнітного потоку.
Механічна характеристика на рис 4.2 можливо побудувати згідно виразам (2.2) і (2.3), із яких виходить, що характеристики не пересікаються в одній крапці на вісі абсцис (Мкз зменшується із зменшенням магнітного потоку ), а швидкості холостого ходу залишається незмінними.
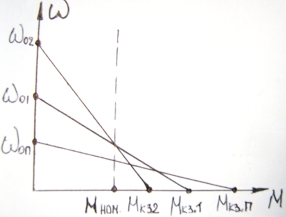
Рис 4.2
На
рис. 4.2 – Мкз.п
– момент короткого замикання при повному
збуджені, тобто на природній характеристиці.
Як слідує з (2.3)
![]() .
.
Якщо
при регулюванні зберігати значення
струму номінальним (Ія=Ія.ном),
то допустимий момент буде
![]() .
.
Як
відомо з (2.1)
![]() (4.1)
(4.1)
Помножимо обидві частини (4.1) на Ія.ном , тоді одержимо:
![]() (4.2)
(4.2)
У
рівнянні (4.2) чисельник є постійна
величина - електрична потужність Рем,
тобто
![]() ,
а регулювання швидкості йде з постійною
потужністю. На рис.4.3 залежність ω(Мдоп)
є гіпербола. Зі зменшенням магнітного
потоку зменшується і жорсткість
характеристики (рис. 4.1 і 4.2 ), що обмежує
діапазон регулювання, що звичайно не
перевищує 1: 8.
,
а регулювання швидкості йде з постійною
потужністю. На рис.4.3 залежність ω(Мдоп)
є гіпербола. Зі зменшенням магнітного
потоку зменшується і жорсткість
характеристики (рис. 4.1 і 4.2 ), що обмежує
діапазон регулювання, що звичайно не
перевищує 1: 8.
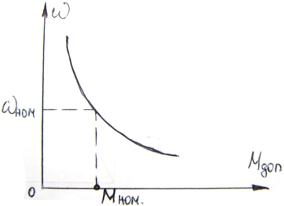
Рис. 4.3
При
ослаблені збудження ( зменшені потоку
Ф)
кутова швидкість буде зростати за умови,
що
![]() .
Якщо момент Мс
= сonst,
то величина ω
буде зростати лише до визначеної величини
смФ
за виразом (4.1), а потім швидкість ω
буде зменшуватись, оскільки при Мс=const
повинен
зростати струм Ія,
а також ІяRя,
що веде до зменшення чисельника виразу
(2.1).
.
Якщо момент Мс
= сonst,
то величина ω
буде зростати лише до визначеної величини
смФ
за виразом (4.1), а потім швидкість ω
буде зменшуватись, оскільки при Мс=const
повинен
зростати струм Ія,
а також ІяRя,
що веде до зменшення чисельника виразу
(2.1).
Починаючи
з деякого значення потоку Ф
у процесі його зменшення зростання
значення ω0
іде повільніше, чим зменшується швидкість,
яка обумовлена спадом напруги ІяRя.
Дійсно, з виразу (2.2) бачимо, якщо
![]() - швидкість ω=0.
- швидкість ω=0.
Рівняння (2.2) можливо перетворити таким чином:
 (4.3)
(4.3)
За
допомогою (4.3) одержимо значення
максимальної швидкості ωmax.
Для цього прирівняємо нулю похідну
![]() .
.
 ,
де
,
де
![]() -
значення ослабленого магнітного потоку
при максимальній швидкості. Щоб похідна
дорівнювала нулю досить прирівняти
нулю чисельник дробу, тоді
-
значення ослабленого магнітного потоку
при максимальній швидкості. Щоб похідна
дорівнювала нулю досить прирівняти
нулю чисельник дробу, тоді
 (4.4)
(4.4)
Підставимо (4.4) в (4.3) і одержимо такий результат :
 (4.5)
(4.5)
Залежність ω(Ф) за М=const показано на рис.4.4 , де М1 >М2 >М3 .
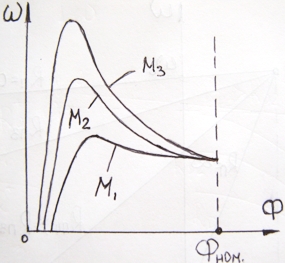
Рис. 4.4
Слід
також відзначити, що згідно рівнянню
(2.1), маємо
 ,
тобто незалежно від струму збудження
відносний перепад швидкостей для
будь-яких характеристик є постійним і
кутова швидкість – стабільна.
,
тобто незалежно від струму збудження
відносний перепад швидкостей для
будь-яких характеристик є постійним і
кутова швидкість – стабільна.