

3. Методика расчета управляемого электропривода
3.1.Условия работоспособности и устойчивости работы привода в постановке задачи регулирования эп
Условия работоспособности привода:
Мэ > Мн
Поскольку механическая характеристика: Мэ = Мэ(Ω) ,то для определения диапазона работоспособности
Условия согласования механической характеристики двигателя и типа нагрузки
По характеру зависимости Mн = f(Ω) нагрузку можно разделить, как показано в таблице 2.
Таблица 2.
-
Тип нагрузки/частотный признак
Момента
Мощности
С постоянной мощностью
Mн = k Ω-1
Pн = const
С постоянным моментом
Mн = const
Pн = k Ω
«вентиляторной» нагрузкой
Mн = k Ω
Pн = k Ω2
Т. обр. зона работоспособности определяется условием:
Мэ(Ω) > Мн(Ω)
Условие устойчивой работы двигателя определяется по уравнению:
![]()
Особенность в том, что М при этом представляет результирующий момент:
М(Ω)= Мэ(Ω) - Мн(Ω)
Поэтому при оценке регулировочных характеристик двигателя, учет условия согласования механической характеристики двигателя и типа нагрузки является обязательным.
3.2. Методика расчета механической и регулировочной характеристик
Как уже было сказано в п.3.1, для расчета зон работоспособности привода необходимо знание механической и регулировочной характеристик двигателя. Вывод уравнения механических характеристик для различных типов двигателей см. Лекции.
Так, например, механическая характеристика АД имеет вид:
 Мэ (4)
Мэ (4)
S
Где обозначено:
Ее график от S приведен на рис.
Эту характеристику необходимо построить в координатах Мэ(Ω), и совместить с Мн(Ω).
Для построения регулировочной характеристики необходимо разрешить уравнение (4) относительно параметра управления: при амплитудном - U, частотном - ω или амплитудно-частотном U = kω.
3.3. Методика расчета диапазона регулирования
Для расчета диапазона регулирования достаточно совместить частотные диапазоны работоспособности и устойчивости привода и выбрать их общую зону.
3.4. Коэффициент использования электродвигателя по мощности
При выборе типа двигателя при проектировании ЭП необходимо обеспечить максимальное использование двигателя по мощности на заданном диапазоне регулирования.
Для оценки степени использования привода вводится коэффициент использования - Кр, который определяется отношением мощности, которую способен реализовать двигатель на заданном диапазоне – Рд к мощности, которая снимается на нагрузке - Рн:
![]()
Каждая из этих мощностей определяется интегралом произведения электромагнитного момента и частоты вращения на интервале регулирования.
![]()
Покажем это на примере. Пусть управление осуществляется при постоянстве мощности или момента. Если Mc=const, а регулирование частоты вращения осуществляется при Pд=const, то во всем диапазоне регулирования ∆ω будет недоиспользована мощность двигателя (рис.3а).
Если же для рабочей машины, работающей в режиме Рс = const применить привод, работающий в режиме Mд=const, то двигатель также будет недогружен в диапазоне ∆ω (рис.13).
Mc= k ω-1 (Рс = const) Mд=const |
Mc=const,Рс = const Mc=k ω-1 Pд=const |
Mc=k ω-1 Mc=const, Pд=const |
|
|
|
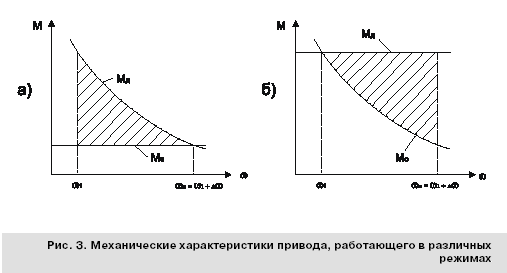



Рис.13. Пояснения к расчету коэффициента мощности.
И тот и другой вариант несоответствия зависимостей Mд(ω) и Мс(ω) приводит к экономическим потерям. Поэтому при оценке регулировочных свойств привода, учет этих соображений является обязательным.
Заметим, что максимальное значение Кр равно 1.