

4.3.4 Регулирование скорости вращения ад введением добавочного эдс в цепи ротора (каскадное регулирование)
Побудительной причиной применения каскадного способа регулирования АД является возможность полезного использования так называемый энергии скольжения присущей этим двигателям.
Расшифруем понятия энергии скольжения. В общем, виде энергетический баланс АМ может быть представлен в виде:
![]()
где -электрическая мощность потребляемое АД из сети, которую за вычетом незначительных потерь в статоре можно представить:
![]()
![]() -
полезная механическая мощность,
отдаваемая двигателем механизму, которую
можно выразить:
-
полезная механическая мощность,
отдаваемая двигателем механизму, которую
можно выразить:
![]()
- потери мощности в двигателе
![]() -
та часть энергии, которая передается
ротору (энергия скольжения).
-
та часть энергии, которая передается
ротору (энергия скольжения).
![]() .
.
Уравнение энергетического баланса является алгебраическим, т.е. в нем за исключением все члены могут изменить свой знак в зависимости от режима работы ЭП (двигательный, генераторный, все тормозные режимы).
Мощность скольжения у АД в двигательном режиме составляет величину до 18% от .
Применительно к мощным ЭП с АД возможность
использования этих 18% представляется
весьма привлекающей и перспективной.
Очевидно, что такая возможность может
быть реализована, только у АД с фазным
ротором, у которых энергия скольжения
ротора может быть транспортирована
либо в питающую электрическую сеть в
виде электрической, либо на вал самого
двигателя в виде механической. При этом
регулирование скорости вращения АД
осуществляется посредством введения
в цепь ротора так называемой добавочной
ЭДС
![]() .
Со стороны преобразователя в цепи
ротора, который называется каскад. Если
записать уравнение равновесия для цепи
ротора, то оно будет иметь следующий
вид:
.
Со стороны преобразователя в цепи
ротора, который называется каскад. Если
записать уравнение равновесия для цепи
ротора, то оно будет иметь следующий
вид:
![]()
- напряжение на кольцах ротора
- ЭДС индуцируемое в роторный цепи
- скольжение
![]() -
полное сопротивление в цепи ротора
-
полное сопротивление в цепи ротора
- ток ротора
Решив это уравнение относительно скольжения получим:
С учетом
![]() :
:
Таким образом
![]() ,
можно воздействовать на скольжение и
как следствие на
.
,
можно воздействовать на скольжение и
как следствие на
.
Классификация схем каскадного регулирования
В общем случае, преобразователь, включенный в цепь ротора, называется каскад, и представляет совокупность 2-х преобразовательных блоков.
![]() -
преобразует переменное напряжение на
кольцах ротора в постоянное выпрямленное
напряжение.
-
преобразует переменное напряжение на
кольцах ротора в постоянное выпрямленное
напряжение.
![]() -
преобразует постоянное напряжение с
выхода
в :
-
преобразует постоянное напряжение с
выхода
в :
а) переменное 3-х фазное напряжение, подключаемое к питающей сети, что даёт возможность транспорта скольжения.
б) постоянное напряжение с выхода в механическую энергию, возвращающуюся на вал регулируемого двигателя. Поэтому по способу преобразования энергии скольжения все каскады можно разделить на 2 вида:
1. электрические
2. электромеханические
Кроме того, в ряде случаев для улучшения показателей каскадного регулирования, примет так называемое комбинированное регулирование, в которых энергия скольжения частично преобразуется в электрическую энергию возвращающуюся в питающую сеть, частично в механическую - отдаваемую на вал двигателя. Структурную схему электрического каскада можно представить следующим образом:
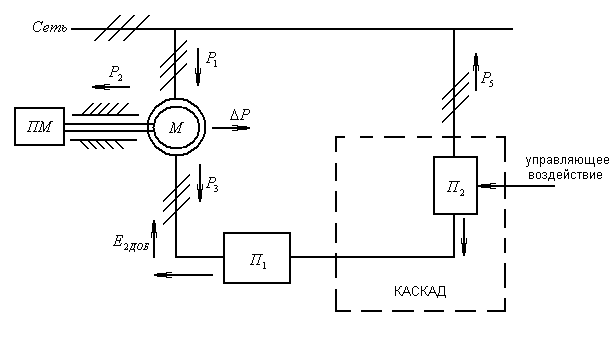
Рис.123 Структурная схема электрического каскада
В электрическом каскаде управляющее воздействие с целью регулирования скорости вращения приводного двигателя вносится в преобразователь . Управляющее воздействия транспортируется через преобразователи и .
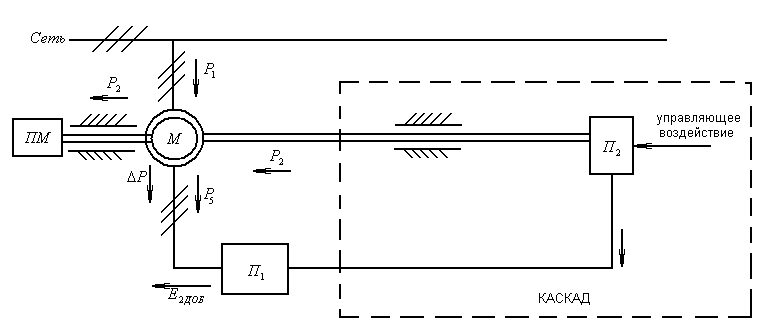
Рис.124 Структурная схема электромеханического каскада
Управляющее воздействия вносится в преобразующий элемент и соответственно транспортируется через в виде добавочной ЭДС
Технические средства, с помощью которых происходит реализация каскадного регулирования.
По этому признаку различают:
1. вентильные каскады. В этом случае преобразователи и представляют из себя статические полупроводниковые устройства.
-выпрямитель
- инвертор
2. вентильно-машинные каскады. В этом случае один из преобразователей является статическим, а 2-й либо электрошинным, либо сочетанием статического преобразователя с электромашинным либо сочетанием 2-х электрических машин.
Т.о. классификация каскадных схем регулирования может быть представлена следующим образом:
1. электрический вентильный каскад
электрический вентильно-машинный каскад
3. электромеханический вентильно-машинный каскад.
4. комбинированный вентильно-машинный каскад
Для того чтобы представить себе вид регулировочных механических характеристик при каскадном регулировании, запишем уравнение для тока на выходе преобразователя (выпрямителя).
![]()
где
![]() -ЭДС
наведенная в фазе обмотки ротора при
(ротор
неподвижен).
-ЭДС
наведенная в фазе обмотки ротора при
(ротор
неподвижен).
- добавочное, ЭДС вводимая на кольца ротора со стороны каскада
![]() -
потери напряжения в каскаде.
-
потери напряжения в каскаде.
![]() -
эквивалентное, активное сопротивление
каскада. Если пренебречь потерями
напряжения в каскаде
-
эквивалентное, активное сопротивление
каскада. Если пренебречь потерями
напряжения в каскаде
![]() ,
а так же учесть, что ЭДС на кольцах
неподвижного ротора
практически
равно напряжению на обмотках ротора
,
а так же учесть, что ЭДС на кольцах
неподвижного ротора
практически
равно напряжению на обмотках ротора
![]() ,
то для режима идеализированного
Х.Х.двигателя, т.е. при отсутствии нагрузки
на его валу, когда ток в ОР
,
то для режима идеализированного
Х.Х.двигателя, т.е. при отсутствии нагрузки
на его валу, когда ток в ОР
![]() ,
а следовательно и
,
а следовательно и
![]() ,
получим:
,
получим:
![]()
В этом выражении:
![]() -
так называемое скольжение каскада в
режиме идеализированного х.х. Отсюда
получим выражение для угловой скорости
при каскадном регулировании:
-
так называемое скольжение каскада в
режиме идеализированного х.х. Отсюда
получим выражение для угловой скорости
при каскадном регулировании:
![]()
![]() -
угловая скорость идеального Х.Х. каскада
-
угловая скорость идеального Х.Х. каскада
- угловая скорость идеального Х.Х. двигателя – угловая скорость ВМП – (синхронная скорость).
С учётом этого семейство регулировочных характеристик при каскадном регулировании будет иметь вид:
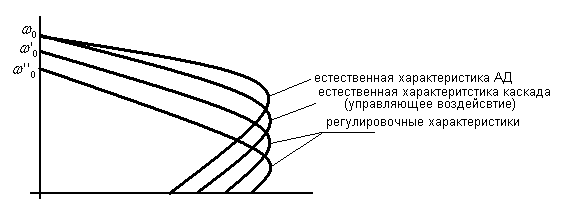
Рис.125 Семейство регулировочных характеристик при каскадном регулировании
Показатели качества:
1. напряжение: однозонное вниз
2. плавность: зависит от вида каскада, в любом случае высокая
3. допустимая нагрузка на валу: регулирование при постоянном моменте
4. стабильность: высокая, но ниже при частотном регулировании
5. энергетические показатели:
КПД всегда высокое: зависит от вида каскада, но в целом не высокий
6. диапазон регулирования: теоретически может быть любым, но практически не превышает 2:1 Т.к. в дальнейшем при увеличении диапазона существенно ухудшаются массогабаритные показатели.
Т.о. главным преимуществом каскадного регулирования является экономия электрической энергии, поэтому целесообразность использования таких ЭП определяется мощностью. Поэтому каскадное регулирование применяют в ЭП менее 1.5 МВт.