

4 Регулирование «координат» эп
Под термином регулирование «координат» ЭП следует понимать:
1. регулирование угловой скорости вращения.
2. регулирование момента.
3. регулирование положения.
В основном промышленные ЭП используемые в нефтегазовой и нефтеперерабатывающей промышленности нуждаются в регулировании угловой скорости, и значительно реже требует регулирование момента и положения.
Регулирование скорости вращения в эп
Регулированием скорости называется принудительное изменение скорости вращения вала приводного двигателя в соответствии с требованиями технологического процесса или с целью энергосбережения. Не следует смешивать понятие «регулирование» с естественным процессом изменения скорости при изменении нагрузки. Для оценки качества регулирования вводятся 6 стандартных нормативных показателей регулирования скорости:
1. диапазон регулирования
2. направление
3. плавность
4.энергетическая эффективность
5. допустимая нагрузка при регулировании
6.стабильность
1. Диапазон регулирования – является главным и обобщающим показателем качества и численно равен отношению максимальной целесообразной скорости при регулировании, к минимальной целесообразной скорости.
![]() и выражается в виде отношения двух
чисел, например
и выражается в виде отношения двух
чисел, например
![]() 1,5:1; 3:1 и т.д.
1,5:1; 3:1 и т.д.
2. Направление регулирования – определяет возможность изменения скорости вращения относительно так называемой основной скорости (подразумевают значение скорости находящиеся на естественной механической характеристике и равной номинальной).
а) однозонное «вниз»
б) однозонное «вверх»
в) двузонное
3.Плавность – этот показатель оценивает возможность использования тем или иным способом регулирования целесообразного или допустимого числа ступеней.
Количественной оценкой является коэффициент плавности:
![]()
При этом регулирование будет считаться
тем более плавным, чем ближе![]() к единице.
к единице.
4. Энергетическая эффективность – характеризуется потерями мощности в процессе регулирования, а также влиянием автоматизированного ЭП на сеть и механизм.
![]() -
коэффициент мощности.
-
коэффициент мощности.
5. Допустимая нагрузка при регулировании – основывается на заданной перегрузочной способности базового элемента ЭП (ЭД), который носит название , при этом при существующих условиях в процессе регулирования, момент двигателя не должен превышать критический, и кроме того, в процессе регулирования двигатель, должен быть оптимально использован по нагреву, что обеспечивается поддержанием в процессе регулирования тока, потребляемого двигателем, равным номинальному току. Поэтому этот показатель, исходя из этого оценивается целесообразностью регулирования при постоянном моменте.
![]() (регулирование
напряжением реостатное и т.д.), либо при
постоянной мощности на валу двигателя
(регулирование
напряжением реостатное и т.д.), либо при
постоянной мощности на валу двигателя
![]() (регулирования
магнитным потоком).
(регулирования
магнитным потоком).
6. Стабильность регулирования. С помощью этого показателя оценивается устойчивость работы ЭП на разных скоростях.
При этом стабильность тем больше, чем выше жесткость рабочей части регулировочной характеристике по отношению к естественной характеристике.
Например:
Характеристика 1- естественная характеристика
2 и 3 – регулировочные.
3-я характеристика более жесткая (стабильность выше).
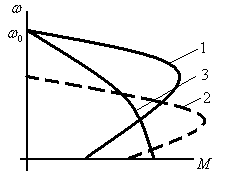
Рис.93 Механические характеристики ЭП